Изобретение относится к машиностроению и может быть использовано в машинах, где требуется регулируемое реверсивное перемещение исполнительного органа.
Известно устройство для прямолинейного перемещения исполнительного органа, содержащее корпус, установленный в нем с возможностью вращения винт, взаимодейству эщую с ним гайку, жестко связываемую с исполнительным органом, и привод, кинематически связанный с винтом.
Недостатками известного устройства является невозможность регулирования хода исполнительного органа, что снижает кинематические возможности, потеря точности, скорости и плавности при реверсе.
Целью изобретения является расширение кинематических возможностей за счет регулирования хода исполнительного органа, повышение точности при реверсе, а также сокращение времени и повышение плавности переключения зубчатых передач, и повышение КПД за счет уменьшения трения.
Указанная цель достигается тем, что кинематическая связь винта выполнена а виде двух зубчатых передач прямого и обратного ходов соответственно переключателя, предназначенногб для попеременного взаимодействия с ведущими колесами зубчатых передач, и механизма управления переключателем, а устройство снабжено средством регулировки хода исполнительного органа, пре/|назначенным для взаимодействия с механизмом управления переключателем. Кроме того, на ступицах .ведущих колес выполнены конусные поверхности, а переключатель выполнен в виде конусной фрикционной муфты, конусные поверхности ПОДВИЖНОЙ части которой предназначены для взаимодействия с конусными поверхностями соответствующих зубчатых колёс. Механизм управления переключател м выполнен в виде по крайней мере одной тяги, один конец которой предназначен для взаимодействия с подвижной частью конусной муфты, и пар рычагов по числу тяг, причем рычаги каждой пары подпружинены один к другому и связаны шарнирно между собой и с вторым концом соответствующей тяги в месте их пересечения. Средство регулирования хода исполнительного органа выполнено в виде регулируемого упора и шарнирного параллелограмма, одно из звеньев которого предназначено для жесткой связи с исполнительным органом, а второе противоположное ему звено - для взаимодействия с рычагами механизма управления переключателем, причем регулируемый упор выполнен в виде размещенного в корпусе винта с опорной площадкой на одном из торцов, предназначенной для взаимодействия с соответствующим звеном шарнирного параллелограмма. Устройство может быть снабжено роликами, один из которых установлен на втором звене шарнирного параллелограмма и предназначен
0 для взаимодействия с опорной площадкой винта, а остальные установлены по одному на каждом из рычагов механизма управления переключателем и предназначены для взаимодействия соответственно с первым и
5 вторым звеном параллелограмма.
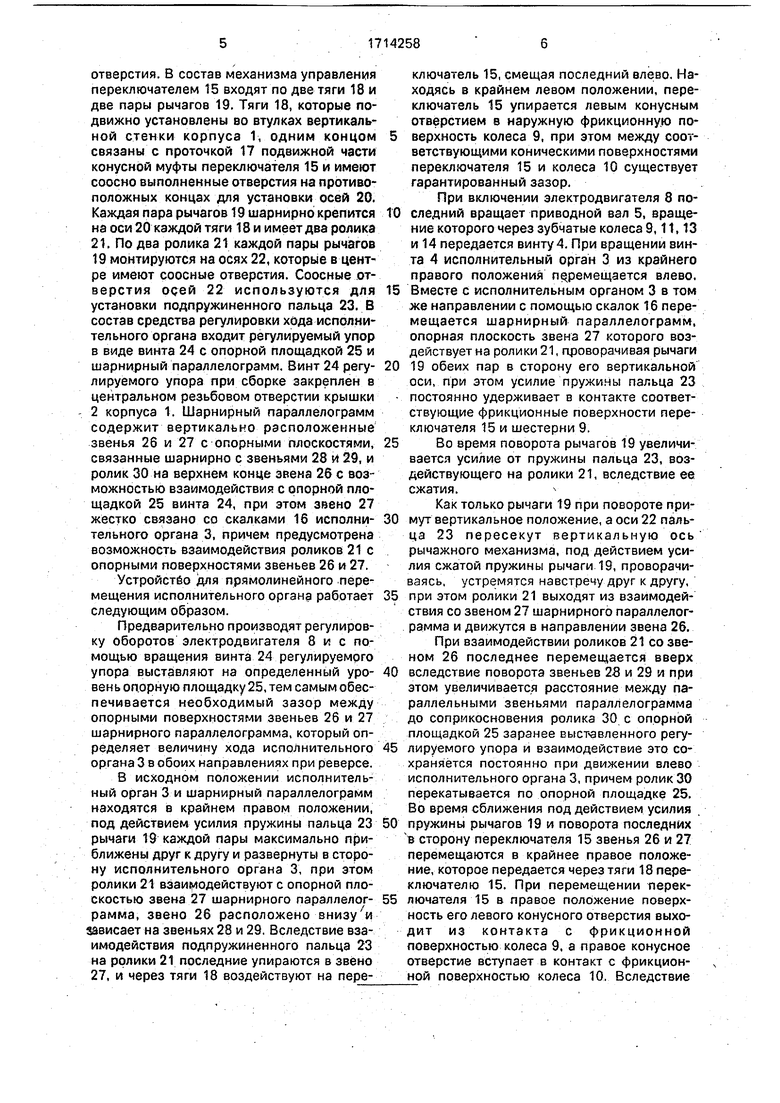
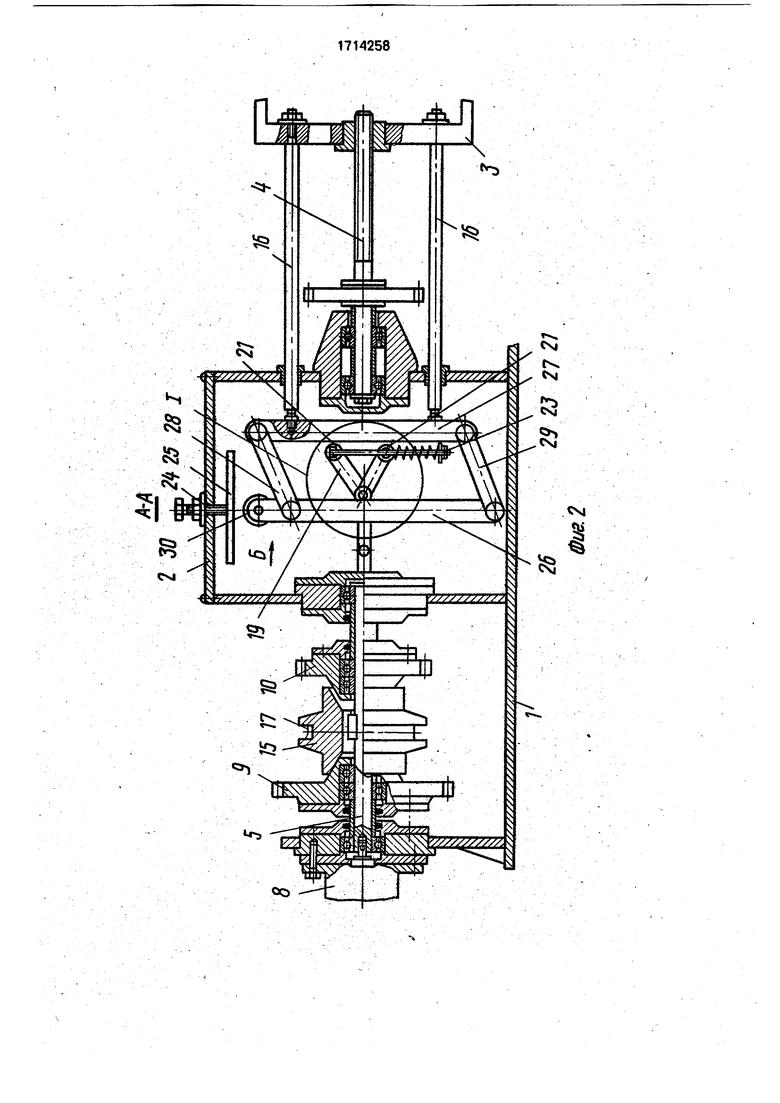
На фиг. 1 представлено устройство в исходном положении, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - разрез В-В на фиг. 1; на
0 фиг. 5-узел I на фиг. 2.
Устройство для прямолинейного перемещения исполнительного органа содержит сварной корпус 1 с вертикальными стенками и крышкой 2, а также исполнительный
5 орган 3, в корпусе которого вьтолнена резьба, винт А и средство регулировки хода исполнительного органа 3. Вертикальные стенки корпуса 1 используются для установки приводного и промежуточного валов 5 и
0 6 соответственно, винта 4 и паразитного колеса 7, кроме того к вертикальным стенкам корпуса 1 винтами закреплена крышка 2 с центральным резьбовым отверстием. На приводном валу 5, который связан с злект5 родвигателем 8 постоянного тока, на подшипниках смонтированы ведущие зубчатые колеса прямого 9 и обратного IX) ходов с наружными конусными поверхностями. Промежуточный вал 6 предназначен для установки ведомых зубчатых колес 11 и 12, которые находятся в кинематической связи с приводным валом 5. Так колесо 11 связано с колесом 9, а колесо 12 через паразитную шестерню 7 связано с колесом 10 приводного вала 5. Кроме того, на промежуточном валу 6 и на винте 4 посажены соответственно зубчатые колеса 13 и 14, находящиеся в кинематической связи, а на валу 5 насажен с возможностью осевого перемещения на
0 шпонке переключатель 15. В корпусе исполнительного органа 3 закреплены скалки 16 и выполнена резьба, выполняющая роль гайки, которая взаимодействует с резьбой винта 4. Переключатель 15 на приводном
5 валу 5 размещен между фрикционными поверхностями ведущих зубчатых колес 9 и 10 и имеет 8 центре круговую проточку 17, при этом переключатель 15 выполнен в виде конусной фрикционной муфты и на его обоих
торцах выполнены фрикционные конусные
отверстия. В состав механизма управления переключателем 15 входят по две тяги 18 и две пары рычагов 19, Тяги 18, которые подвижно установлены во втулках вертикальной стенки корпуса 1, одним концом связаны с проточкой 17 подвижной части конусной муфты переключателя 15 и имеют соосно выполненные отверстия на противоположных концах для установки осей 20. Каждая пара рычагов 19 шарнирно крепится на оси20 каждой тяги 18 и имеет два ролика 21. По два ролика 21 каждой пары рычагов 19 монтируются на осях 22, которые в центре имеют соосные отверстия. Соосные отверстия осей 22 используются для установки подпружиненного пальца 23. В состав средства регулировки хода исполнительного органа входит регулируемый упор в виде винта 24 с опорной площадкой 25 и шарнирный параллелограмм. Винт 24 регулируемого упора при сборке закреплен в центральном резьбовом отверстии крышки 2 корпуса 1. Шарнирный параллелограмм содержит вертикально расположенные звенья 26 и 27 с опорными плоскостями, связанные шарнирно с звеньями 28 и 29, и ролик 30 на верхнем конце звена 26 с возможностью взаимодействия с опорной площадкой 25 винта 24, при этом звено 27 жестко связано со скалками 16 исполнительного органа 3, причем предусмотрена возможность взаимодействия роликов 21с опорными поверхностями звеньев 26 и 27.
Устройстбо для прямолинейного перемещения исполнительного органа работает следующим образом.
Предварительно производят регулировку оборотов электродвигателя Вис помощью вращения винта 24 регулируемрго упора выставляют на определенный уровень опорную площадку 25, тем самым обеспечивается необходимый зазор между опорными поверхностями звеньев 26 и 27 шарнирного параллелограмма, который определяет величину хода исполнительного органа 3 в обоих направлениях при реверсе.
В исходном положении исполнительный орган 3 и шарнирный параллелограмм находятся в крайнем правом положении, под действием усилия пружины пальца 23 рычаги 19 каждой пары максимально приближены друг к другу и развернуты в сторону исполнительного органа 3, при этом ролики 21 взаимодействуют с опорной плоскостью звена 27 шарнирного параллелограмма, звено 26 расположено внизу и зависает на звеньях 28 и 29. Вследствие взаимодействия подпружиненного пальца 23 на ролики 21 последние упираются в звено 27, и через тяги 18 воздействуют на переключатель 15, смещая последний влево. Находясь в крайнем левом положении, переключатель 15 упирается левым конусным отверстием в наружную фрикционную поверхность колеса 9, при этом между соответствующими коническими поверхностями переключателя 15 и колеса 10 существует гарантированный зазор.
При включении электродвигателя 8 последний вращает приводной вал 5, вращение которого через зубчатые колеса 9,11,13 и 14 передается винту 4. При вращении винта 4 исполнительный орган 3 из крайнего правого положения перемещается влево.
5 Вместе с исполнительным органом 3 в том же направлении с помощью скалок 16 перемещается шарнирный параллелограмм, опорная плоскость звена 27 которого воздействует на ролики 21, проворачивая рычаги
0 19 обеих пар в сторону его вертикальной оси, при этом усилие пружины пальца 23 постоянно удерживает в контакте соответствующие фрикционные поверхности переключателя 15 и шестерни 9.
5 Во время поворота рычагов 19 увеличивается усилие от пружины пальца 23, воздействующего на ролики 21, вследствие ее сжатия.
Как только рычаги 19 при повороте примут вертикальное положение, а оси 22 пальца 23 пересекут вертикальную ось рычажного механизма, под действием усилия сжатой пружины рычаги 19, проворачиваясь, устремятся навстречу друг к другу,
5 при этом ролики 21 выходят из взаимодействия со звеном 27 шарнирного параллелограмма и движутся в направлении звена 26. При взаимодействии роликов 21 со звеном 26 последнее перемещается вверх
0 вследствие поворота звеньев 28 и 29 и при этом увеличивается расстояние между параллельными звеньями параллелограмма до соприкосновения ролика 30 с опорной площадкой 25 заранее выст авленного регулируемого упора и взаимодействие это сохраняется постоянно при движении влево исполнительного органа 3, причем ролик 30 перекатывается по опорной площадке 25. Во время сближения под действием усилия
0 пружины рычагов 19 и поворота последних в сторону переключателя 15 звенья 26 и 27 перемещаются в крайнее правое положение, которое передается через тяги 18 переключателю 15. При перемещении переключателя 15 в правое положение поверхность его левого конусного отверстия выходит из контакта с фрикционной поверхностью колеса 9, а правое конусное отверстие вступает в контакт с фрикционной поверхностью колеса 10. Вследствие
этого вращение вала от электродвигателя 8 передается винту 4 по другому кинематическому пути и осуществляется через колеса 10, 7,12,13 и 14, в результате этого происходит реверс вращения винта 4 без измен|ения направления вращения вала электродвигателя 8. Вследствие реверса винта 4 изменяется направление движения исполнительного органа 3, который перемещается вправо совместно с шарнирным параллелограммом.
Движение исполнительного органа 3 в крайнее правое положение будет продолжаться До тех пор, пока звено 26 параллелограмма вследствие воздействия на ролики 21 не переведет аналогичным образом обе пары рычаге 19 в исходное положение.
При возвращении обеих пар рычагов 19 в исходное положение происходит реверс вращения вала 4 и операция повторяется.
Таким образом величина хода исполнительного органа 3 во взаимно противоположных направлениях зависит от расст( ния между звеньями 26 и 27 шарни(жого параллелограмма и определяется положением опорной площадки винта 24.
Предлагаемое устройство позволяет реверсировать движение без реверса электродвигателя 8, а также регулировать ход исполнительного органа 3.
Формула и 3 о б ре т е н и я i. Устройство для прямолинейного перемещения исполнительного органа, содержащее корпус, установлвннь1й в нем с воз «1 жйостью вращения винт, взаимодействующую с ним гайку, жестко связываемую с исполн«1тельным органом, и привод, кинемат1 1ески связанный с винтом, отличающееся тем, что, с целью расширения кинематических возможностей путем регулирования хода исполнительного органа и повышения точности при реверсе, кинематическая связь винта с приводом выполнена в .виде двух зубчатых переуяач прямого и обратного ходов соответственно, переключателя, предназначенного для попеременного взаимодействия с ведущими колесами зубчатых передач, и механизма управления переключателем, а устройство снабжено средством регулировки хода исполнительного органа, предназначенным для взаимодействия с механизмом управления переключателем.
2.Устройство по п. 1, о т л и ч а ю щ е е с я тем, что, с целью сокращения времени
переключения зубчатых передач, на ступицах ведущих колес выполнены конусные поверхности, а переключатель выполнен в виде конусной фрикционной муфты, конусные поверхности подвижной части которой
предназначены для взаимодействия с конусными поверхностями соответствуюМ их зубчатых колес.ч
3.Устройство по пп. 1 и 2, о т л и ч а ющ е е с я тем, что механизм управления
переключателем выполнен в виде по крайней мере одной тяги, один конец которой предназначен для взаимодействия с подвижной частью конусной муфты, и пар рычагов по числу тяг. причем рычаги каждой пары подпружинены/один к другому и связаны шарнирно между собой и вторым концом соответствующей тяги е месте их пересечения,
4.Устройство по пп. t-3, от л « ч а ющееся тем, что средство регулирования
хода исполнительного органа выполнено в виде регулируемого упора н шарнирного параллелограмма, одно из звеньев которого предназначено для жесткой связи с исполнительным органом, а вто|юе противоположное ему звено - для взаимодействия с рычагами механизма управления переключателем.
5.Устройство по пп. 1-4, о т л и ч а ю г щееся тем, что регулируемый упор выполнен в виде размещенного в корпусе винта с опорной площадкой на одном из торцов, предназначенной для взаимодействия с соответствующим эвеном шарнирного параллелограмма.
6.Устройство по nh. 1-5, от л и ч а ю щееся тем, что, с целью повышения плавности переключения зубчатых передач
и КПД путем уменьшения трения, оно снабжено роликами, из которых установлен на втором звене шарнирного .параллелограмма и предназначен для взаимодействия с опорной площадк( винта, а остальные установлены по одному на каждом из рычагов механизма управления переключателем и предназначены для взаимодействия соответственно с первым и вторым звеном параллелограмма.
00
ваЭ б фиг.З
Фиг 5
ВВ ФиеЛ

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
| БЕССТУПЕНЧАТАЯ ТРАНСМИССИЯ, ВАРИАТОР, ОГРАНИЧИТЕЛЬ ДИАПАЗОНА ПЕРЕДАТОЧНЫХ ЧИСЕЛ И САТЕЛЛИТ | 2009 |
|
RU2399814C1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| АВТОМАТИЧЕСКИЙ ПРИВОД | 1994 |
|
RU2082050C1 |
| Механизм транспортировки материала на швейной машине | 1983 |
|
SU1208112A1 |
| Установка для аргонодуговой сварки поворотных стыков труб неплавящимся электродом с подачей присадочной проволоки | 1990 |
|
SU1776528A1 |
| Автомат для гибки изделий из проволоки | 1989 |
|
SU1641490A1 |
| Устройство для передвижения по вертикальным опорам Л.Н.Бульмана | 1991 |
|
SU1796217A1 |
| ЦЕНТРОБЕЖНЫЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ДИЗЕЛЯ | 1995 |
|
RU2101530C1 |
| Токарный автомат | 1980 |
|
SU884897A2 |
Изобретение относится к машиностроению и может быть использовано во всех отраслях народного хозяйства для регулируемого реверсивного перемещения исполнительного органа. Цель изобретения - расширение кинематических возможностей за счет регулирования хода исполнительного органа, повышение точности при ревер* се, сокращение времени и повышение плавности переключения зубчатых передач, а также повышение КПД за счет уменьшения трения. Устройство содержит приводной и промежуточный валы, соответственно, ис>& полнительный орган 3, винт 4,механизм управления переключателем 15 и средство регулирования хода исполнительного dpra- на 3. При вращении винта 4 исполнительный орган 3 перемещается поступательно и через скалки 16, звено, ролики 21 и рычаги воздействует натяги 18. В оезультатеэтого. происходит перемещение тяг 18 и переключение кинематической цепи между злектро- двигателем 8 и винтом 4, а вращение последнего реверсируется, в результате чего происходит реверс исполнительного органа 3. Ход исполнительного органа 3 регулируется изменением зазора между опорной площадкой и роликом. 5 з.п.ф-лы, 5 йл.; ;;^^^ГОи!OD>&
| Устройство для прямолинейных перемещений исполнительного органа | 1978 |
|
SU696220A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
