1
Изобретение относится к области машиностроения, а именно к манипуляторам, применяемым в различных производственных процессах.
Известна рука манипулятора, содержащая корпус, конический дифференциал, неподвижное звено которого связано с корпусом прямолинейными направляющими, захват, жестко связанный с сателлитом дифференциала, и приводы, расположенные на корпусе 1.
Указанная рука манипулятора сложна, так как имеет отдельные направляющие для прямолинейного перемещения неподвижного звена конического дифференциала и для щлицевых валов механизма ориентации захвата. Кроме того, необходимость расположения шлицевых валов внутри цилиндрических направляющих прямолинейного перемещения приводит к увеличению диаметра направляющих, что увеличивает массу руки.
Целью изобретения являются упрощение конструкции и уменьщение массы.
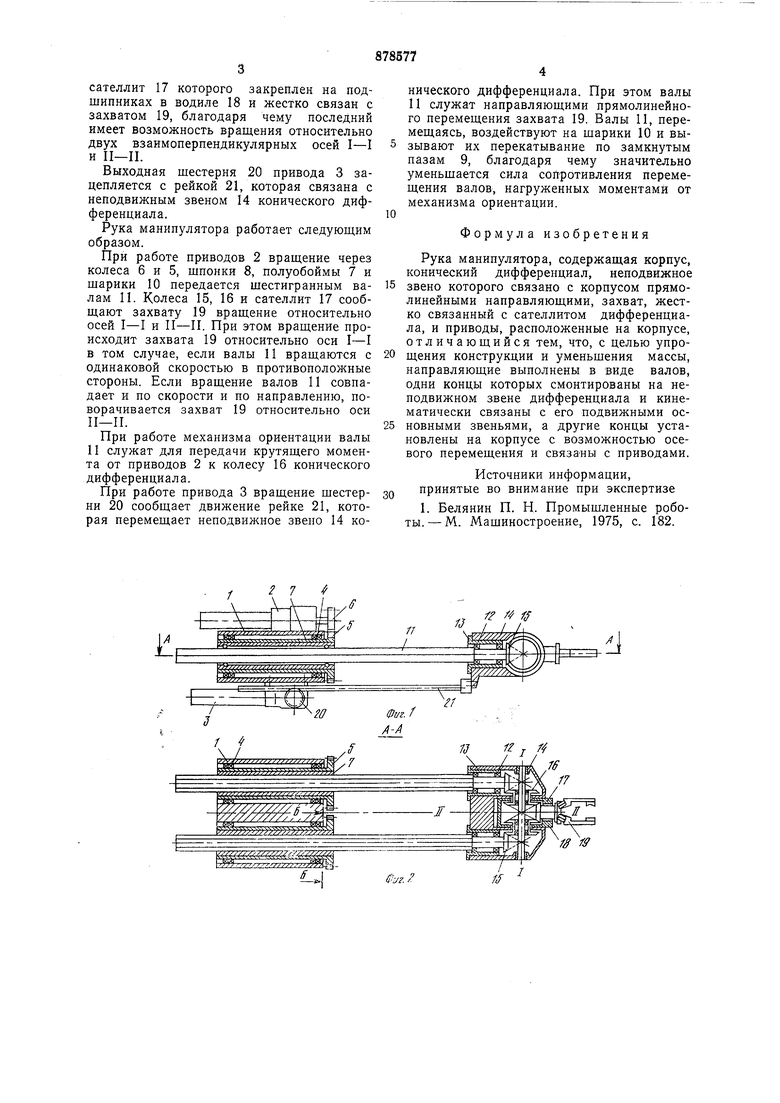
Эта цель достигается тем, что направляющие выполнены в виде валов, одни концы которых смонтированы на неподвижном звене дифференциала и кинематически связаны с его подвижными основными звеньями, а другие концы установлены на корпусе с возможностью осевого перемещения и связаны с приводами. На фиг. 1 изображен общий вид руки
манипулятора, разрез; на фиг. 2 - разрез
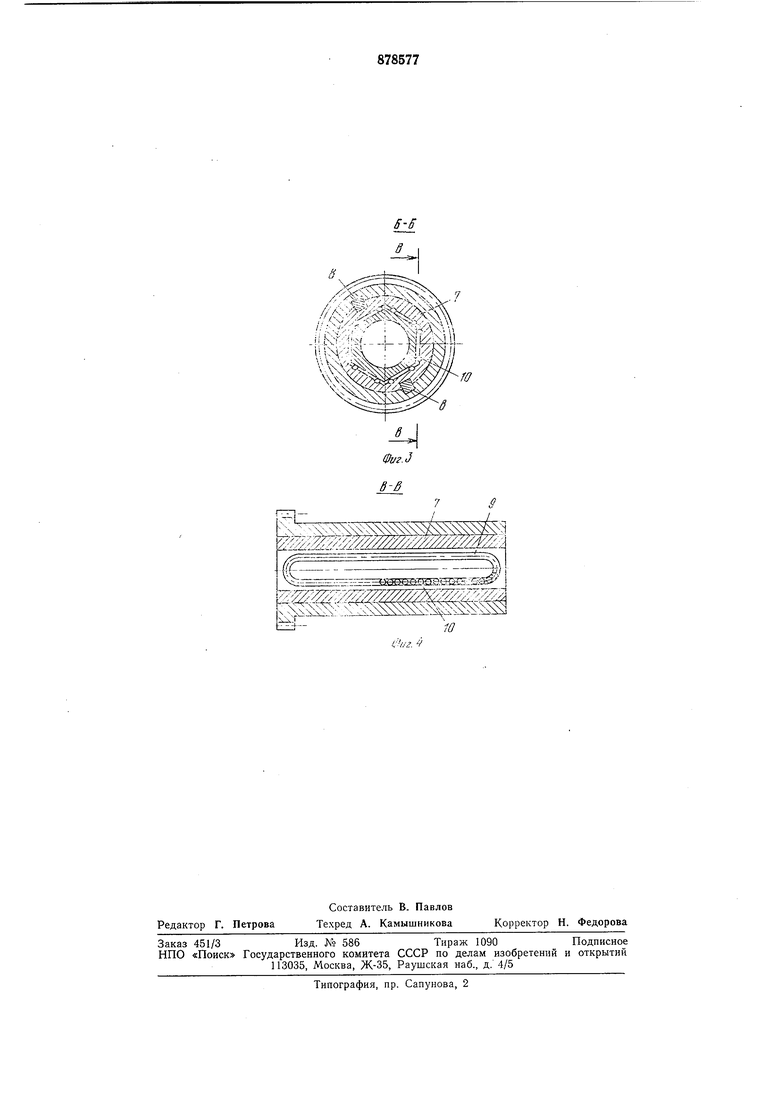
5 А-А на фиг. 1; на фиг. 3 разрез Б-Б
на фиг. 2; на фиг. 4 - разрез В-В на
фиг. 3.
Рука манипулятора содержит корпус I,
на котором жестко закреплены приводы 2
10 ориентации и привод 3 прямолинейного
движения. В корпусе 1 на щариковых подщипниках 4 установлены зубчатые колеса
5,зацепляющиеся с зубчатыми колесами
6,жестко связанными с приводами 2. Внут15 ри ступиц каждого из зубчатых колес 5
помещены по две полуобоймы 7, связанные со ступицами колес 5 с помощью щпонок 8. Внутренняя поверхность полуобойм 7 образует щестигранник с кольцевыми пазами 9 на каждой из граней. В этих пазах находятся щарики 10, которые контактируют с щестигранными валами 11. Передние концы валов 11 закреплены с помощью подщипников 12 и стаканов 13 в неподвижном звене 14 конического дифференциала. На концах валов 11 закреплены конические зубчатые колеса 15, зацепляющиеся с двумя блоками конических зубчатых колес 16, являющихся основными подвижны30 ми звеньями конического дифференциала.
сателлит 17 которого закреплен на подшипниках в водиле 18 и жестко связан с захватом 19, благодаря чему последний имеет возможность вращения относительно двух взаимоперпендикулярных осей I-I и П-П.
Выходная шестерня 20 привода 3 зацепляется с рейкой 21, которая связана с неподвижным звеном 14 конического дифференциала.
Рука манипулятора работает следующим образом.
При работе приводов 2 вращение через колеса 6 и 5, шпонки 8, полуобоймы 7 и шарики 10 передается шестигранным валам II. Колеса 15, 16 и сателлит 17 сообщают захвату 19 вращение относительно осей I-I и II-II. При этом вращение происходит захвата 19 относительно оси I-I в том случае, если валы И вращаются с одинаковой скоростью в противоположные стороны. Если вращение валов 11 совпадает и по скорости и по направлению, поворачивается захват 19 относительно оси П-II.
При работе механизма ориентации валы 11 служат для передачи крутящего момента от приводов 2 к колесу 16 конического дифференциала.
При работе привода 3 вращение шестерни 20 сообщает движение рейке 21, которая перемещает неподвижное звено 14 конического дифференциала. При этом валы II служат направляющими прямолинейного перемещения захвата 19. Валы 11, перемещаясь, воздействуют на шарики 10 и вызывают их перекатывание по замкнутым пазам 9, благодаря чему значительно уменьшается сила сопротивления перемещения валов, нагруженных моментами от механизма ориентации.
Формула изобретения
Рука манипулятора, содержащая корпус, конический дифференциал, неподвижное
звено которого связано с корпусом прямолинейными направляющими, захват, жестко связанный с сателлитом дифференциала, и приводы, расположенные на корпусе, отличающийся тем, что, с целью упрощеиия конструкции и уменьшения массы, направляющие выполнены в виде валов, одни концы которых смонтированы на неподвижном звене дифференциала и кинематически связаны с его подвижными основными звеньями, а другие концы установлены на корпусе с возможностью осевого перемещения и связаны с приводами.
Источники информации, принятые во внимание при экспертизе
1. Белянин П. Н. Промышленные роботы. - М. Машиностроение, 1975, с. 182.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Манипулятор | 1979 |
|
SU831615A1 |
| Рука манипулятора | 1983 |
|
SU1138312A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Манипулятор | 1984 |
|
SU1240581A2 |
| Рука манипулятора | 1985 |
|
SU1256961A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Исполнительный орган манипулятора | 1974 |
|
SU496170A1 |
.f
,
7
., // // I I /
//
Фиг. / А-А
/ т //
/
fff
ff
{
