1
Изобретение относится к электротехнике, а именно к электроприводу, и может быть использовано в высокоточных следящих релейных электропри- 5 водах.
Целью изобретения является повышение точности управления электроприводом.
На чертеже приведена схема уст- Ю ройства, реализующего предложенный способ управления.
Устройство, реализующее предложенный способ, содержит последовательно соединенные задатчик 1 угла, узел 2 сравнения, регулятор 3, реле А, усилитель 5 мощности, исполнительный двигатель 6 с датчиком 7 углового положения, выход которого соединен с вторым входом узла 2 сравнения. Задатчик 1 угла через измеритель 8 первой производной угла задания соединен с вторым входом реле 4.
В качестве задатчика угла может быть использован сельсин-датчик, а в качестве измерителя 8 первой производной угла задания - тахогенера- тор на валу сельсин-датчика. В качестве реле 4 может быть использован компаратор со схемой регулирования напряжения питания положительной полярности.
Устройство работает следующим образом.
Сигнал задатчика угла 1 в узле 2 35 сравнивают с сигналом датчика 7 углового положения исполнительного вала, результат сравнения корректируют регулятором 3, подают на реле 4, а вы13671202
ходиой сигнал реле 4 подают иа усилитель 5 мощности, которьй управляет исполнительным двигателем 6. С помощью измерителя 8 измеряют первую производную угла задания и регулируют положительную амплитуду выходного сигнала реле 4 в функции первой производной угла задания.
Таким образом, использование данного способа позволяет за счет поддержания постоянной отрицательной амплитуды выходного напряжения реле и изменения положительной амплитуды выходного напряжения реле в функции первой производной угла задания исключить статическую ошибку регулирования и тем самым повысить точность управления электроприводом.
20
25
Формулаизо
р е т е н и я
30
Способ управления следящим релейным электроприводом, по которому формируют напряжения, пропорциональные заданному и действительному угловым положениям исполнительного вала, результат сравнения этих напряжений дифференцируют и формируют напряжение для двухпозиционного управления двигателем, отличающийся тем, что, с целью повьшения точности управления, дополнительно формируют напряжение, пропорциональное производной угла задания, а напряжение для двухпозиционного управления двигателем формируют в функции напряжения, пропорционального производной угла задания.
Формулаизо
р е т е н и я
Способ управления следящим релейным электроприводом, по которому формируют напряжения, пропорциональные заданному и действительному угловым положениям исполнительного вала, результат сравнения этих напряжений дифференцируют и формируют напряжение для двухпозиционного управления двигателем, отличающийся тем, что, с целью повьшения точности управления, дополнительно формируют напряжение, пропорциональное производной угла задания, а напряжение для двухпозиционного управления двигателем формируют в функции напряжения, пропорционального производной угла задания.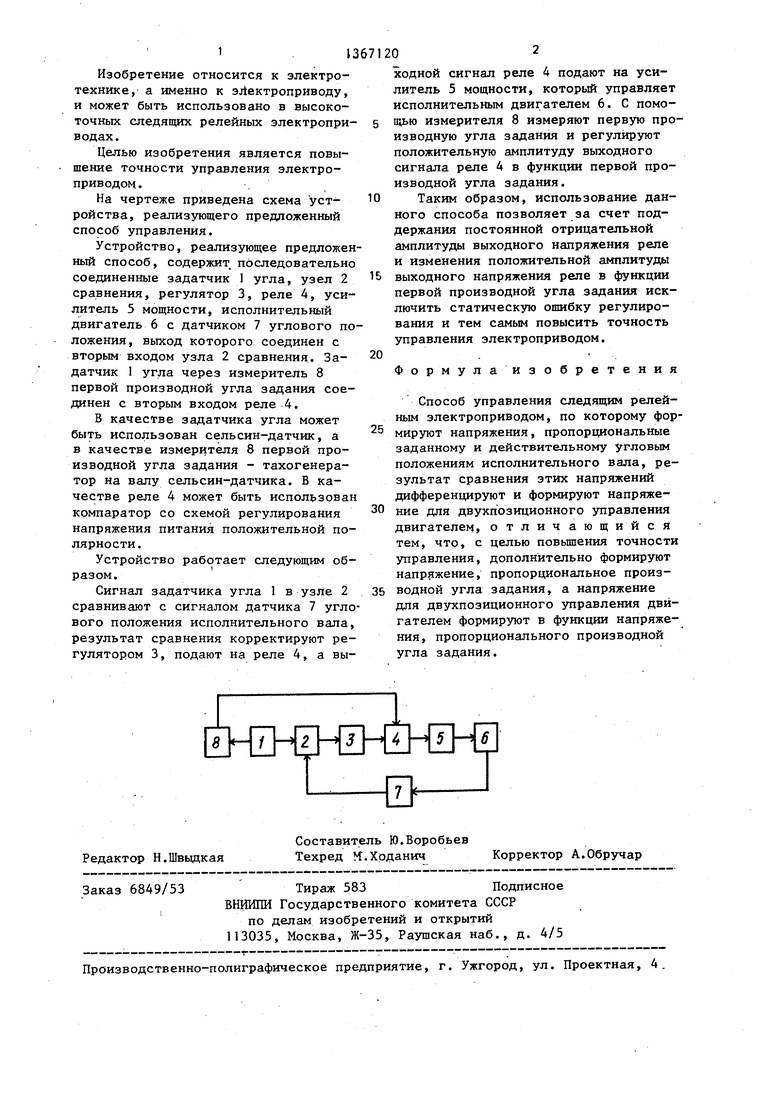
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод с коррекцией люфта в механической передаче | 1976 |
|
SU647646A1 |
| Способ управления вентильным двигателем и следящая система для его осуществления | 2017 |
|
RU2649306C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| Следящий электропривод | 1981 |
|
SU1022137A1 |
| СПОСОБ УПРАВЛЕНИЯ ЩИТОМ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2509892C1 |
| ИНТЕГРИРУЮЩИЙ ПРИВОД ПЕРЕМЕННОГО ТОКА | 2000 |
|
RU2177168C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2651812C2 |
| Двухпозиционный электропривод кантователя блюминга | 1983 |
|
SU1088831A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
Изобретение относится к электротехнике и м.б. использовано в высокоточных следящих релейных электроприводах. Целью изобретения является повышение точности управления электроприводом. Способ управления следящим релейным электроприводом заключается в сравнении сигнала задания угла с сигналом измерителя углового положения исполнительного, вала, результат, сравнения корректируют пропорционально-дифференциальным регулятором, подают на двухпозиционное реле, а вы- ходной сигнал реле подают на усилитель мощности, который управляет кс- полнительным двигателем, одновременно измеряют первую производную угла задания и в ее функции регулируют положительную амплитуду выходного сигнала реле. 1 шт. с (Л
| Чиликин М.Г | |||
| , Сандлер А.С | |||
| Общий курс электропривода | |||
| М.: Энергоиздат, 1981, с | |||
| Способ выделения сульфокислот из нефтяных масел | 1913 |
|
SU508A1 |
| Справочник по автоматизированиому электроприводу/Под ред | |||
| В.А.Елисеева и А.В | |||
| Шинянского | |||
| М.: Энергоатомиз- да г, 1983, с | |||
| Судно | 1918 |
|
SU352A1 |
