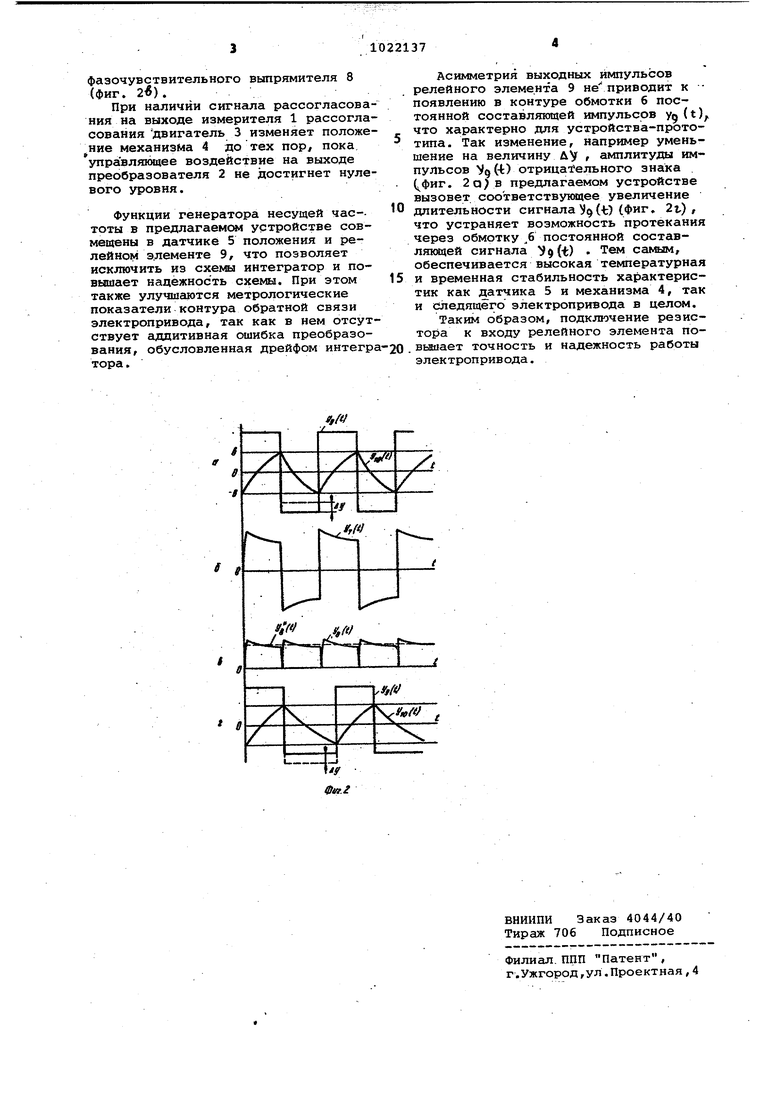
Изобретение относится к электроприводам и может использоваться при автоматизации технологических процессов . Известен следящий электропривод, состоящий из вентильного преобразователя, на выходе которого включен исполнительный электродвигатель, ва которого механически связан с датчиком положения, выход которого сое динен с информационньам входом вентильного преобразователя, а также генератор несущей частоты для питания датчика положения t lДанное устройство имеет низкую точность работы из-за аддитивной составляющей дрейфа нуля выходного сигнала генератора несущих колебаний.. Наиболее близок к предлагаемому . электропривод, содержащий сумматор, широтно-импульс.ный преобразователь, электродвигатель, исполнительный ,механизм, сельсин с пе вичной и вторичной обмотками, фазочувствительный выпрямитель, генератор несущей частоты, включающий ре лейный элемент ,и интегратор, токоограничивагащий резистор и источник задающего сигнала 2, Однако известный электропривод имеет,сравнительно низкую точность работгл, одной из причин которой яв ляется дрейф нуля выходного сигнала генератора, что вызвано асиммет рией и нестабильностью амплитуд импульсов релейного элемента, а также источниками аддитивной ошибки интег тора типа входного тока и ЭДС смещение нуля. Кроме того, реализация генератора на базе автоколебательного звена, включающего релейный элемент и интегратор, приводит к неоправданному увеличению элементов системы электропривода, что от рицательно сказывается на показателях его надежности. Цель изобретения - повышение точ ности и надежности следящего электропривода. Поставленная цель достигается тем, что в следящем электроприводе содержащем последовательно соединенные измеритель рассогласования, широтно-импульсный преобразователь и двигатель, на валу которого расположены исполнительный механизм . и датчик положения, первичная обмотка которого последовательно с токоограничивающим резистором включена между выходом релейного элемента -И шиной нулевого потенциала, вторичная обмотка датчика положения подключена к первому входу фазочувствительного выпрямителя, второй вход которого соединен с выходом релейного элемента, а выход со вторым входом измерителя рассогласования, вход релейного элемента подключен к входу токоограничивающего резистора. На фиг. 1 приведена схема электропривода; на фиг. 2 - временные диаграммы его сигналов. В состав устройства входят измеритель 1 рассогласования, широтноимпульсный преобразователь 2, силовой двигатель 3, исполнительный ме-. ханизм 4, датчик 5 положения с первичной 6 и вторичной 7 обмотками, фазочувствительный выпрямитель 8, релейный элемент 9, токоограничивающий резистор 10, а также вход 11 и выход 12 релейного элемента 9. Устройство работает следующим образом. Измеритель 1 рассогласования предназначен для суммирования сигнала задания Х с сигналом обратной связи, поступающим с выхода фазочувствительного выпрямителя 8. Преобразователь 2 осуществляет преобразование аналогового выходного сигнала измерителя 1 рассогласования в широтно-импульсный сигнал с соответствующим законом модуляции . Исполнительный механизм 4 имеет жесткую механическую связь с валом двигателя 3 и датчиком 5 положения. Релейный элемент 9, резистор 10 и первичная обмотка 6 датчика 5 образуют автоколебательную систему выполняющую функции источника сигнала несущий частоты датчика 5 положения. При положительном сигнале на выходе релейного элемента 9 (фиг. 20) напряжение 4,j{t) на резисторе 10 увеличивается по амплитуде до тех пор, пока не- достигает величины -f В порога- переключения элемента 9. После переключения релейного элемента 9 и изменения знака сигнала . Уд (t) начинается процесс перемагнич:ивания датчика 5, который заканчивается в момент времени выполнения условия () -В (фиг. 2а). В дальнейшем процесс периодически повторяется. При этом во вторичной обмотке 7 датчика 5 трансформируется сигнал t) (фиг.2 d), пос-. тупающий на вход фазочувствительного выпрямителя 8, Сигналом опорной частоты выпрямителя 8 являются выходные импульсы релейного элемента 9. В зависимости от фазы сигнала у (t) по отношению к импульсам у (t) (фиг. 2аиб) навыходе фазочувствительного выпрямителя 8 формируется сигнал VgCt) (фиг. 2iS) постоянного уровня, пульсации которого подавляются входным фильтром фазочувствительного выпрямителя 8 (фиг. 2). При наличии сигнала рассогласова ния на выходе измерителя 1 рассогла сования двигатель 3 изменяет положе ние механизма 4 до тех пор/ пока управляющее воздействие на выходе преобразователя 2 не достигнет нуле вого уровня. Функции генератора несущей час-тоты в предлагаемся устройстве совмещены в датчике 5 положения и релейном элементе 9, что позволяет исключить из схемы интегратор и повышает надежность схемы. При этом также улучшаются метрологические показатели контура обратной связи электропривода, так как в нем отсут ствует аддитивная ошибка преобразования, обусловленная дрейфом интегр тора. Асимметрия выходных импульсов релейного элемента 9 не приводит к появлению в контуре обмотки 6 постоянной составляющей импульсов у(t) что характерно для устройства-прототипа. Так изменение, например уменьшение на величину ду , амплитуды импульсов VQ (-t) отрицательного знака (фиг. 2 а) в предлагаемом устройстве вызовет соответствующее увеличение длительности сигнала )(Фиг. 2t), что устраняет возможность протекания через обмотку 6 постоянной составлякяцей сигнала ) Тем самым, обеспечивается высокая температурная и временная стабильность характеристик как датчика 5 и механизма 4, так и следящего электропривода в целом. Таким образом, подключение резистора к входу релейного элемента повышает точность и надежность работы электропривода.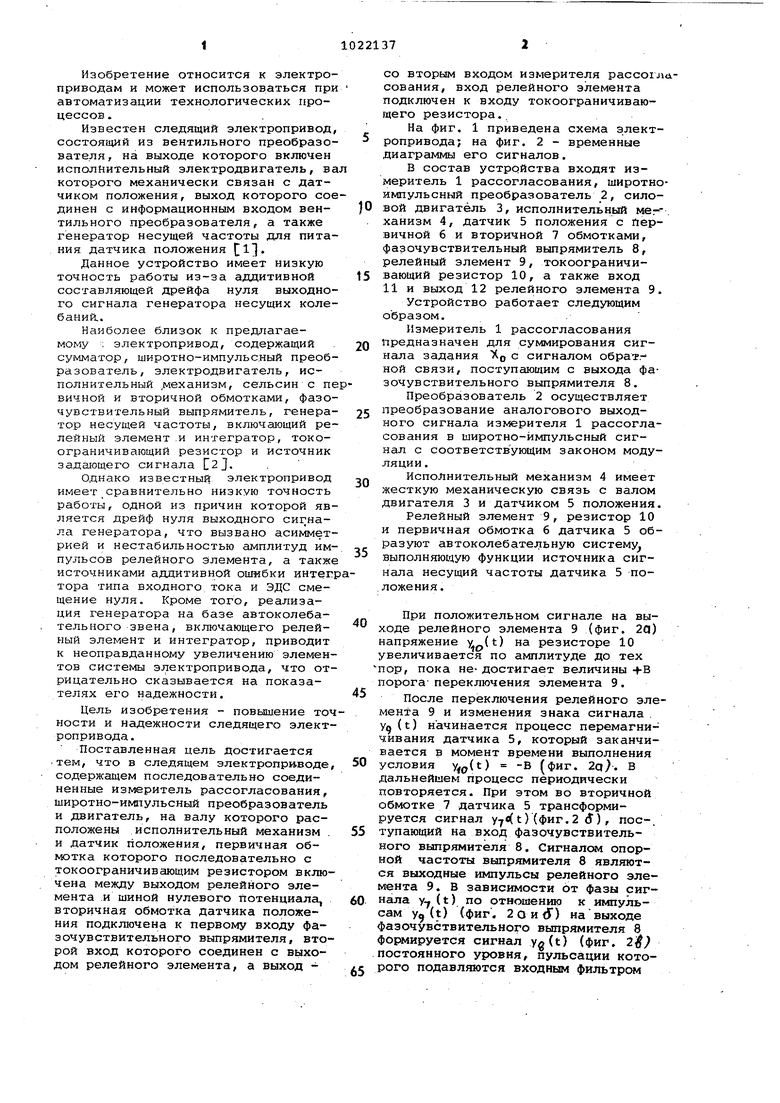
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Следящий электропривод | 1991 |
|
SU1833828A1 |
| Устройство для регулирования технологических параметров | 1980 |
|
SU959046A1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| Цифровая следящая система | 1987 |
|
SU1730610A1 |
| УСТРОЙСТВО ДЛЯ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ БЕССТУНЕНЧАТОЙ ТРАСМИССИЕЙ САМОХОДНОЙ МАШИНЫ | 1973 |
|
SU389968A1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| БЕСКОНТАКТНЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1973 |
|
SU383191A1 |
| СЛЕДЯЩАЯ СИСТЕМА С ЦИФРОВЫМ ОТСЧЕТОМ | 1972 |
|
SU419730A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВО,всссогознАЯр,- '-гч'-:-.'•'';[.'?|'.тгн»о. ..! ;; 1\^ )i..'Uiil iLunAji . Е'^^БЛИОТЕКА | 1971 |
|
SU309813A1 |
. СЛВданЦИЙ ЭЛЕКТРОПРИВОД, содержащий последовательно соединенные измеритель рассогласования, широтноимпульсный преобразователь и двигатель, на валу которого расположены исполнительный механизм и датчик положения, первичная обмотка которого последовательно с токоограничивающим резистором включена июжду выходом релейного элемента и шиной нулевого потенциала, вторичная обмотка датчика положения подключена к первому входу фазочувствительного выпрямителя, второй вход которого соединен с выходом релейного элемента, а выход - со вторым входом измерителя рассогласования, о. тлич ающийся тем, что, с целью повышения точности и надежности электропривода, вход релейного элемента подключен к входу токоограничиваюадего резис- g тора. Ш Хо 0- sas
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Чемоданов Б.К | |||
| Следящие приводы | |||
| М., Энергия, 1976, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛОРИСТОГО БАРИЯ ИЗ ТЯЖЕЛОГО ШПАТА | 1923 |
|
SU480A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Н/т отчет | |||
| № 7895315 | |||
| Челябинск, ЧПИ, 1979, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
