Изобретение относится к области электромеханических интегрирующих приводов переменного тока, управляемых сигналами постоянного тока и предназначенных для использования в высокоточных системах приборной автоматики, а также может быть использовано в общем приборостроении.
Известен интегрирующий привод [1] (стр. 246 - 248, рис. 6.4), в состав которого входят последовательно соединенные измеритель рассогласования, усилитель, преобразователь, электродвигатель и тахогенератор. Выход тахогенератора соединен со вторым входом измерителя рассогласования. Недостатком этого привода является отсутствие корректирующих фильтров в контуре управления, что не позволяет полностью реализовать динамические возможности электродвигателя.
Известен также интегрирующий электропривод [1] (стр. 468 - 476, рис. 12.16), в котором имеются измеритель тока и последовательно соединенные задатчик, первый измеритель рассогласования, регулятор скорости, второй измеритель рассогласования, регулятор тока, преобразователь, электродвигатель, измеритель угловой скорости. Выход измерителя скорости соединен со вторым входом первого измерителя рассогласования. Вход измерителя тока соединен с выходом преобразователя, а выход - со вторым входом второго измерителя рассогласования. В этом приводе из-за использования линейной коррекции динамические возможности электродвигателя также не могут быть использованы полностью.
Известен интегрирующий привод переменного тока [2], содержащий последовательно включенные измеритель рассогласования, усилитель переменного тока, исполнительный механизм электромеханического действия и измеритель угловой скорости, выход которого соединен со вторым входом измерителя рассогласования, на первый вход которого подается сигнал в виде напряжения постоянного тока, управляющий приводом.
Такой привод из-за несовершенства схемы управления характеризуется низкой точностью при воспроизведении динамичных управляющих воздействий и не может обеспечить требуемое качество процессов при использовании в высокоточных системах приборной автоматики.
Наиболее близким к предполагаемому изобретению является интегрирующий привод переменного тока [3], содержащий последовательно включенные измеритель рассогласования, изодромный фильтр, усилитель переменного тока, исполнительный механизм электромеханического действия и измеритель угловой скорости, выход которого соединен со вторым входом измерителя рассогласования, на первый вход которого подается сигнал в виде напряжения постоянного тока, управляющий приводом.
В таком приводе по сравнению с предыдущим обеспечивается наиболее высокая точность воспроизведения динамичных управляющих воздействий за счет введения изодромного фильтра, однако вследствие отрицательного влияния люфта и сил трения в механической передаче, соединяющей двигатель с объектом регулирования, точность такой системы также недостаточна для использования в системах управления.
Технической задачей настоящего изобретения является повышение точности интегрирующих приводов переменного тока. Одновременно достигаются повышение плавности движения привода (характеризующейся скоростью изменения угловой ошибки) и уменьшение неравномерности его движения (определяемой девиациями угловой ошибки).
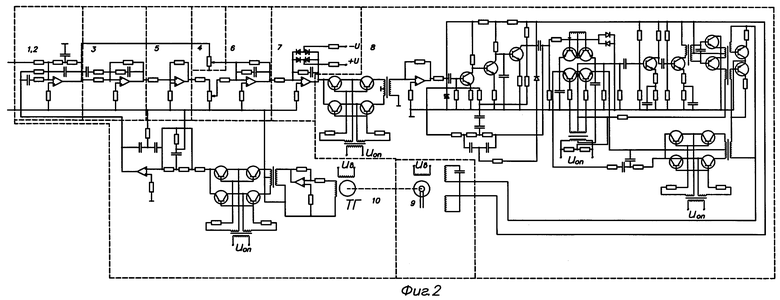
Для решения указанной задачи в интегрирующий привод переменного тока, содержащий измеритель рассогласования, последовательно включенные изодромный фильтр, усилитель переменного тока, исполнительный механизм электромеханического действия и измеритель угловой скорости, выход которого соединен со вторым входом измерителя рассогласования, введены усилитель сигнала ошибки и последовательно включенные фильтр стабилизации частоты автоколебаний, фильтр-задатчик частоты автоколебаний, релейный элемент, интегродифференцирующий фильтр. При этом вход фильтра стабилизации частоты автоколебаний соединен с выходом измерителя рассогласования, вход усилителя сигнала ошибки соединен с выходом фильтра стабилизации частоты автоколебаний, выход усилителя сигнала ошибки соединен со вторым входом интегродифференцирующего фильтра, выход которого соединен со входом изодромного фильтра.
На фиг. 1 схематично изображен предлагаемый интегрирующий привод.
Привод содержит измеритель рассогласования 1, фильтр стабилизации частоты автоколебаний 2, фильтр-задатчик частоты автоколебаний 3, усилитель ошибки 4, релейный элемент 5, интегродифференцирующий фильтр 6, изодромный фильтр-ограничитель 7, усилитель переменного тока 8, исполнительный механизм электромеханического действия 9, измеритель угловой скорости 10.
Принципиальная электрическая схема интегрирующего привода представлена на фиг. 2.
Все используемые в предлагаемом техническом решении блоки являются известными. Фильтр стабилизации частоты автоколебаний 2, фильтр-задатчик частоты автоколебаний 3, усилитель сигнала ошибки 4, релейный элемент 5, интегродифференцирующий фильтр 6 выполнены на базе операционных усилителей. В качестве усилителя переменного тока 8 может быть использован, например, усилитель УРМ-1Б. Реализация релейного элемента представлена в [4]. Реализация интегродифференцирующего фильтра 6 - в [5]. Усилитель переменного тока 8 - в [6].
Работа привода осуществляется следующим образом. Рабочим режимом предлагаемого интегрирующего привода переменного тока является наличие автоколебаний как при отсутствии, так и при наличии управляющего приводом сигнала.
Сигнал управления в виде напряжения постоянного тока поступает на измеритель рассогласования 1, где он сравнивается с сигналом, пропорциональным угловой скорости объекта регулирования. Сигнал с выхода измерителя рассогласования 1 поступает на вход фильтра стабилизации частоты автоколебаний 2, имеющего крутопадающую на частоте автоколебаний характеристику фазового запаздывания. Сигнал с выхода фильтра стабилизации частоты автоколебаний 2 поступает одновременно на фильтр-задатчик частоты автоколебаний 3, обеспечивающий заданную частоту автоколебаний за счет необходимого фазового опережения, и на усилитель сигнала ошибки 4. Сигнал с выхода фильтра-задатчика частоты автоколебаний 3 поступает на релейный элемент 5, представляющий собой электронное реле. Сигналы с выхода релейного элемента 5 и усилителя сигнала ошибки 4 суммируются с одинаковыми знаками на входе интегродифференцирующего фильтра 6, обеспечивающего усиление сигнала ошибки на частотах управляющих воздействий. Сигнал с выхода интегродифференцирующего фильтра 6 поступает на изодромный фильтр-ограничитель 7, также обеспечивающий усиление сигнала ошибки на частотах управляющих воздействий. Сигнал с выхода изодромного фильтра-ограничителя 7 поступает на усилитель переменного тока 8, где производится его амплитудная модуляция и усиление по мощности. Сигнал с выхода усилителя переменного тока 8 поступает в исполнительный механизм электромеханического действия 9 на обмотку управления исполнительного двигателя, который через механическую передачу обеспечивает заданное перемещение объекта регулирования. Вал электродвигателя через механическую передачу соединен с измерителем угловой скорости 10, выходным сигналом которого является напряжение постоянного тока, которое сравнивается в измерителе рассогласования 1 с сигналом, управляющим приводом.
За счет введения релейного элемента в предлагаемом приводе возникают автоколебания. Частота автоколебаний должна быть меньше несущей частоты (рабочей частоты напряжения питания электродвигателя), и ее величина устанавливается на уровне 10-20% от частоты несущей. Режим устойчивых автоколебаний обеспечивается введением фильтра-задатчика частоты автоколебаний, который формирует требуемую частоту автоколебаний за счет фазового опережения, и фильтра стабилизации частоты автоколебаний, обеспечивающего значение фазовой характеристики разомкнутого контура, равной минус 180o на выбранной частоте.
Введение режима автоколебаний позволяет существенно повысить точность системы за счет эффекта вибрационной (гармонической) линеаризации люфта и сил сухого трения в механической передаче, соединяющей двигатель с объектом регулирования, которая, как правило, не превышает единиц угловых секунд. Кроме того, вибрационная линеаризация нелинейностей позволяет повысить плавность движения привода и уменьшить неравномерность движения интегрирующего электропривода. Крутопадающая фазовая характеристика привода в области частоты автоколебаний обеспечивает малую изменчивость частоты автоколебаний в нормальных условиях работы, а следовательно и стабильную амплитуду автоколебаний. Это делает коэффициенты гармонической линеаризации также весьма стабильными.
Введение в систему релейного элемента, фильтра-задатчика частоты автоколебаний и фильтра стабилизации частоты автоколебаний позволяет также существенно уменьшить составляющую ошибки привода от действия сил трения и люфта в механической системе, однако точность такой системы по-прежнему будет недостаточной при динамичных управляющих воздействиях.
Управляющие воздействия по сравнению с частотой автоколебаний могут рассматриваться как медленноменяющиеся сигналы, поэтому в предлагаемой системе уменьшение ошибки, обусловленной динамичностью управляющих воздействий, достигается за счет введения интегродифференцирующего фильтра, обеспечивающего усиление сигналов только на частотах управления.
Кроме того, сигнал ошибки усиливается также за счет усилителя сигнала ошибки, включенного параллельно фильтру-задатчику частоты автоколебаний и релейному элементу. Введение усилителя сигнала ошибки позволяет обеспечить требуемую точность и минимальное время переходного процесса при воздействии больших по величине, а также ступенчатых управляющих сигналов, когда автоколебания в системе исчезают (релейный элемент находится на одном из упоров). Использование ограничителя линейной зоны изодромного фильтра, а также рациональный выбор коэффициента усилителя сигнала ошибки позволяет повысить точность системы без ухудшения качества переходных процессов.
Следовательно, в предлагаемом приводе повышение точности при одновременном улучшении параметров плавности и неравномерности движения обеспечивается за счет существенного уменьшения влияния сил трения и люфта в механической передаче за счет эффекта вибрационной линеаризации на стабильной частоте автоколебаний, достигаемого введением релейного элемента, фильтра-задатчика частоты автоколебаний и фильтра стабилизации частоты автоколебаний, а также увеличения коэффициента усиления по сигналу ошибки отработки управляющего воздействия, достигаемого введением интегродифференцирующего фильтра и усилителя сигнала ошибки.
Источники информации
1. М. Г. Чиликин, А.С. Сандлер. Общий курс электропривода. М.: Энергоиздат, 1981 г., стр. 246-248, 468-476.
2. Е. А. Фабрикант, P.Л. Воскобойников. Интегрирующий привод. М.: Энергия, 1966 г., стр.6, рис. 1.1. Схема интегрирующего привода.
3. Е. А. Фабрикант, Р.Л. Воскобойников. Интегрирующий привод. М.: Энергия, 1980 г., стр.8, рис. 1-2.
4. У. Титце, К.Шенк. Полупроводниковая схемотехника. М.: Мир, 1984 г., стр.288, рис. 17.26.
5. В.И. Стульников. Программирование задач для решения на АВМ. Киев: Техника, 1978 г., стр.24, таблица 1.
6. А. К. Азова и др. Усилители следящих систем переменного тока. Л.: Энергия, 1972 г., стр. 142.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2206861C2 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2003 |
|
RU2236669C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 1999 |
|
RU2157503C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКИЙ РУЛЕВОЙ ПРИВОД УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2218549C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПНЕВМАТИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ УПРАВЛЯЕМОГО СНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2138767C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ | 2001 |
|
RU2212687C2 |
Изобретение относится к электромеханическим интегрирующим приводам переменного тока, управляемым сигналами постоянного тока и предназначенным для использования в высокоточных системах приборной автоматики. Технический результат заключается в повышении точности. Одновременно достигаются повышение плавности движения привода, характеризующейся скоростью изменения угловой ошибки, и уменьшение неравномерности его движения, определяемой девиациями угловой ошибки. Привод содержит измеритель рассогласования, изодромный фильтр, усилитель переменного тока, исполнительный механизм электромеханического действия, измеритель угловой скорости, усилитель сигнала ошибки, фильтр стабилизации частоты автоколебаний, фильтр-задатчик частоты автоколебаний, релейный элемент, интегродифференцирующий фильтр. 2 ил.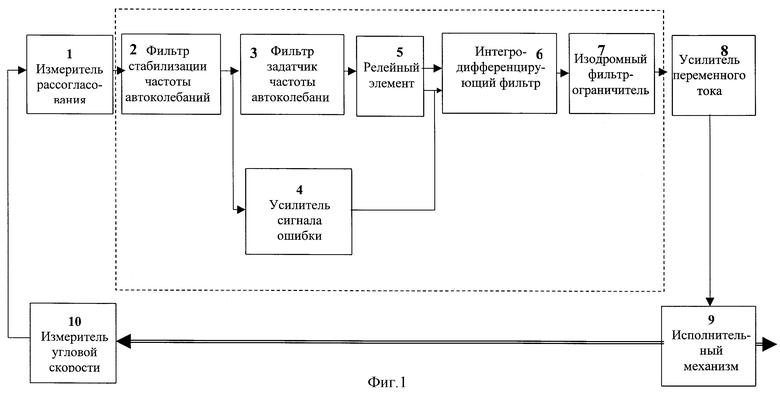
Интегрирующий привод переменного тока, содержащий измеритель рассогласования, последовательно включенные изодромный фильтр, усилитель переменного тока, исполнительный механизм электромеханического действия и измеритель угловой скорости, выход которого соединен со входом измерителя рассогласования, отличающийся тем, что в него введены усилитель сигнала ошибки и последовательно включенные фильтр стабилизации частоты автоколебаний, фильтр-задатчик частоты автоколебаний, релейный элемент, интегродифференцирующий фильтр, причем вход фильтра стабилизации частоты автоколебаний соединен с выходом измерителя рассогласования, вход усилителя сигнала ошибки соединен с выходом фильтра стабилизации частоты автоколебаний, выход усилителя сигнала ошибки соединен со вторым входом интегродифференцирующего фильтра, выход которого соединен со входом изодромного фильтра.
| ФАБРИКАНТ Е.А | |||
| и др | |||
| Интегрирующий привод | |||
| - М.: Энергия, 1980, с | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1167579A2 |
| Интегрирующий привод переменного тока | 1984 |
|
SU1239683A2 |
| US 5416390 A, 16.05.1995 | |||
| ФАБРИКАНТ Е.А | |||
| и др | |||
| Интегрирующий привод | |||
| - М.: Энергия, 1966, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЧИЛИКИН М.Г | |||
| и др | |||
| Общий курс электропривода | |||
| - М.: Энергоиздат, 1981, с | |||
| Котел | 1921 |
|
SU246A1 |
| Там же, с | |||
| Прибор для деления угла на три части | 1922 |
|
SU468A1 |

