Изобретение относится к области систем автоматизированного управления, а в частности к системам управления в горной промышленности, и может быть применено для управления щитовым тоннелепроходческим комплексом.
Известны способы управления щитовыми тоннелепроходческими комплексами, в которых с помощью измерительной техники определяют положение исполнительного органа комплекса в пространстве и далее с помощью блока автоматического управления формируют сигналы управления щитом. Наиболее близким к предлагаемому является способ [а.с. СССР 1599537, кл. Е21С 35/24, 1988], в котором определяется угол наклона относительно горизонтальной плоскости и угол наклона относительно вертикальной плоскости исполнительного органа комплекса, данные углы сравнивают с заданием для данной точки пространства и формируют сигналы отклонения от задания, далее на основании этих сигналов формируют релейный сигнал управления исполнительным органом. Данный способ выбран в качестве прототипа для заявляемого в патенте способа управления.
Недостаток способа, описанного в прототипе [а.с. СССР 1599537, кл. Е 21 С 35/24, 1988], заключается в том, что закон управления щитом не учитывает данные об угловой скорости, линейном перемещении и линейной скорости перемещения щита и поэтому не обеспечивает достаточной точности и надежности управления.
Известны различные системы управления движением исполнительных органов тоннелепроходческих комплексов, в которых присутствуют оптические приборы определения положения щита в пространстве, блок задания положения, блок управления механизмами передвижения щита. Наиболее близкой к предлагаемой является система [а.с. СССР 1599537, кл. Е21С 35/24, 1988], в которой с помощью лазера, расположенного в пройденной части тоннеля, и приемного фотоэлемента, расположенного на исполнительном органе комплекса, задают направление движения тоннелепроходческого комплекса, с фотоэлемента сигналы поступают на блок управления, где формируют сигналы отклонения от задания для данной точки пространства и на основании этого сигнала формируют сигнал управления золотниками гидродомкратов продвижения щита.
Недостаток системы, описанной в прототипе [а.с. СССР 1599537, кл. Е21С 35/24, 1988], заключается в том, что в данной системе отсутствуют средства определения угловой скорости, линейного перемещения и линейной скорости, а блок управления не позволяет учитывать при формировании сигнала управления угловую скорость, линейное перемещение и линейную скорость.
Технической задачей настоящего изобретения является повышение точности и надежности управления передвижением щита тоннелепроходческого комплекса.
Поставленная задача решается благодаря тому, что в предлагаемом способе управление щитом осуществляют в двух плоскостях посредством систем управления по вертикали и по горизонтали, при этом с помощью измерительной техники определяют углы наклона исполнительного органа относительно вертикальной и горизонтальной плоскостей, затем формируют сигналы по вышеуказанным углам наклона, также дополнительно определяют сигналы по скорости изменения угла наклона относительно вертикальной и горизонтальной плоскостей, линейные перемещения в вертикальной и горизонтальной плоскостях, скорости изменения линейного перемещения в вертикальной и горизонтальной плоскостях, вышеперечисленные сигналы о состоянии щита тоннелепроходческого комплекса подают на блок управления по четырем координатам, где их сравнивают с заданием, после чего на основании сигналов рассогласования формируют релейный закон управления исполнительным органом. А предлагаемая следящая система управления щитом тоннелепроходческого комплекса, содержит последовательно соединенные оптический задатчик направления, блок отклонения луча, диафрагму, фотоэлектрическое приемное устройство, блок управления по четырем координатам, вход которого также соединен с блоком наблюдателя состояния, который своим входом соединен с блоком измерения углов наклона.
Техническая сущность изобретения заключается в следующем: управление щитом осуществляется в двух плоскостях (горизонтальная и вертикальная системы управления). В каждой из систем осуществляется релейное управление, причем функция переключения формируется путем вычитания из задания координат состояния объекта со своими весовыми коэффициентами.
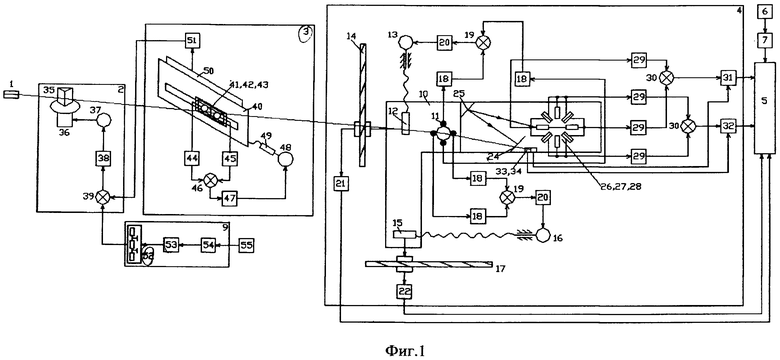
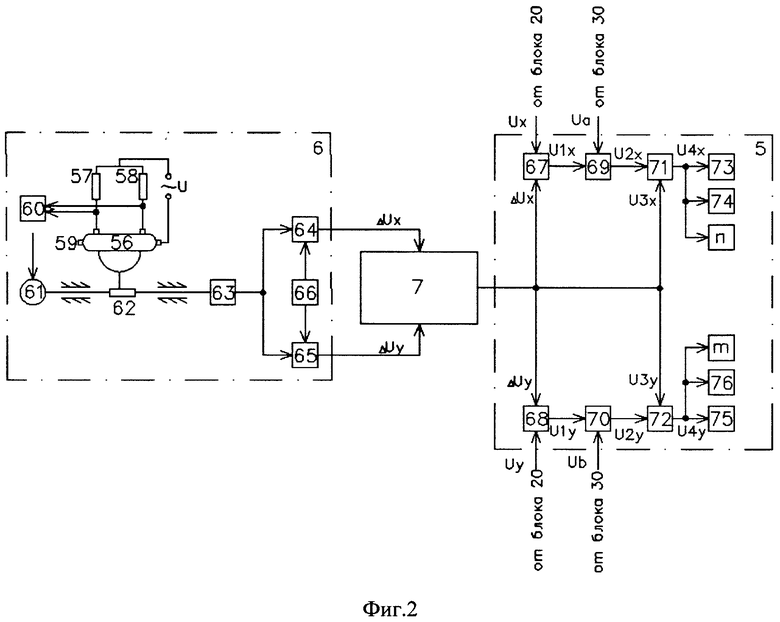
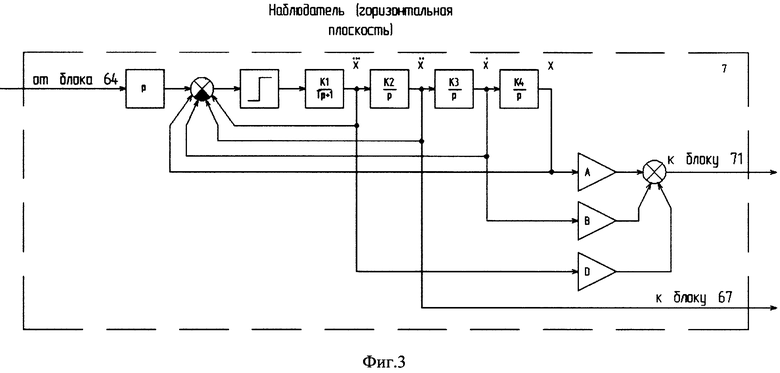
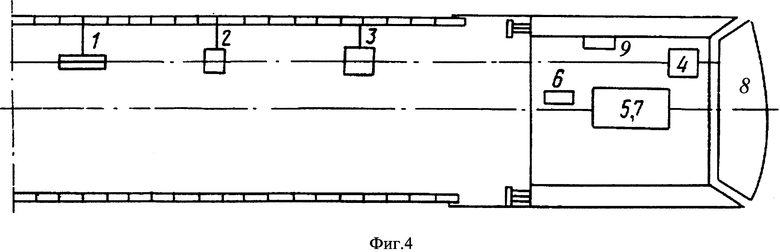
На фиг.1 представлена принципиальная схема следящей системы управления; на фиг.2 - блок управления с блоком наблюдателя состояния и с блоком измерения углов наклона; на фиг.3 - блок наблюдателя состояния; на фиг.4 - расположение элементов системы в проходческом забое.
Система состоит из оптического задатчика направления 1, луч которого проходит через блок 2 отклонения луча, диафрагму 3 и поступает на вход матрицы фотоэлектрического приемного устройства 4, связанного с блоком управления по четырем координатам 5, на вход которого также поступает сигнал от блока наблюдателя состояния 7, на вход которого поступает сигнал с блока измерения углов наклона 6. Вход блока 2 отклонения луча связан с блоком задания угла поворота 9.
Фотоэлектрическое приемное устройство состоит из матрицы 10 с четырьмя фотоэлементами 11, расположенными друг от друга на расстоянии, равном диаметру луча, связанной механически через винтовую передачу 12 с электродвигателем 13 и индуктивным датчиком измерения перемещения 14. Посредством горизонтальной винтовой передачи 15 матрица 10 связана с электродвигателем 16 и индуктивным датчиком измерения перемещения 17. Фотоэлементы 11 через избирательные усилители 18, устройства сравнения 19 и усилители мощности 20 электрически связаны с электродвигателями 13 и 16. Индуктивные датчики измерения перемещения 14 и 17 электрически связаны через фазочувствительные усилители 21 и 22 с блоком управления по четырем координатам 5. С матрицей 10 механически, посредством корпуса, и оптически, посредством полупрозрачного зеркала 24 и отражающего зеркала 25, связана матрица 26, состоящая из четырех основных фотоэлементов 27, расположенных на взаимно перпендикулярных осях, и восьми дополнительных фотоэлементов 28, размещенных между основными и соединенных по два параллельно. Фотоэлементы 27 и 28 связаны через избирательные усилители 29, устройства сравнения 30 и регулируемые усилители 31, 32 с блоком управления по четырем координатам 5. В цепи обратных связей выходных усилителей 31 и 32 включены дополнительные фотоэлементы-фоторезисторы 33 и 34 соответственно. Блок отклонения луча 2 состоит из зеркальной призмы 35, связанной через редуктор 36 с электродвигателем 37, соединенным через усилитель 38 с устройством сравнения 39, которое подключено к блокам 3 и 9.
Диафрагма 3 состоит из основания 40, на котором установлена матрица 41 с отверстием 42 и двумя фотоэлементами 43, связанными через усилители напряжения 44 и 45 с устройством сравнения 46, которое через усилитель мощности 47 подключено к электродвигателю 48. Электродвигатель соединен через винтовую передачу 49 с матрицей 41 и датчиком перемещений 50, который через усилитель 51 соединен с устройством сравнения 39 блока 2.
Блок 9 задания угла поворота оптического луча состоит из секционированного потенциометра 52, подключенного к ламелям шагового искателя 53, соединенного электрически с путевым выключателем 54, связанным с механизмом перемещения 55 проходческого щита (гидродомкратом).
Блок измерения углов наклона 6 (фиг.2) состоит из электролитического датчика 56, электрически связанного с резисторами 57 и 58 и механически с винтом 59. Кроме того, блок 6 содержит усилитель 60, вход которого электрически связан с резисторами 57 и 58, а выход подключен к электродвигателю 61, который через редуктор 62 соединен с электролитическим датчиком 56 и индуктивным датчиком 63. Выход индуктивного датчика 63 связан со входами функциональных преобразователей 64 и 65, выходы которых связаны с блоком наблюдателя состояния 7. Входы функциональных преобразователей 64 и 65 также соединены с выходами задатчика 66.
Блок наблюдателя состояния 7 представляет собой электронное устройство, реализующее вычисления по алгоритму, изображенному на фиг.3. Вход наблюдателя состояния 7 соединен с выходом блока измерения углов наклона 6, а выход со входом блока управления по четырем координатам 5.
Блок управления по четырем координатам 5 содержит сумматоры 67 и 68, входы которых соединены с выходом блока наблюдателя состояния 7 и с выходами усилителей мощности 20, cумматоры 69 и 70, входы которых соединены с выходами сумматоров 67 и 68 соответственно и с выходами устройств сравнения 30, cумматоры формирования сигналов управления 71 и 72, входы которых соединены с выходами сумматоров 69 и 70 соответственно и с выходом блока наблюдателя состояния 7. На выходы сумматоров формирования сигналов управления 71 и 72 подключены реле соответственно 73,74,…,n и 75,76,…,m.
Реализацию способа управления рассмотрим на примере работы следящей системы.
Оптический задатчик направления 1, блок отклонения луча 2 и диафрагма 3 устанавливаются в тоннеле, а все остальные блоки на щите 8 (фиг.4); с помощью луча оптического задатчика направления 1 задается направление движения щита. Слежение за лучом и измерение линейных и угловых координат щита осуществляется фотоэлектрическим приемным устройством 4. В установившемся состоянии все фотоэлементы 11 освещены лучом оптического задатчика направления 1. Снимаемые с них электрические сигналы, усиленные избирательными усилителями 18, поступают на устройства сравнения 19. При этом выходные сигналы их равны нулю.
Если имеет место отклонение щита, а следовательно, и фотоэлектрического приемного устройства, то оказываются засвеченными не все фотоэлементы 11 матрицы 10. На выходе устройств сравнения 19 появляются сигналы рассогласования, которые через усилители мощности 20 включают электродвигатели 13 и 16. Эти электродвигатели через винтовые передачи 12 и 15 перемещают матрицу 10 таким образом, чтобы все фотоэлементы 11 были освещены одинаково. Пройденный матрицей 10 путь, определенный отклонением точки щита 8, в которой закреплено приемное устройство 4, измеряется индуктивными датчиками измерения перемещения 14 и 17. Аналоговые сигналы Ux и Uy с датчиков через фазочувствительные усилители 21 и 22 поступают в блок управления по четырем координатам 5.
Луч оптического задатчика направления 1, проходя через отверстие матрицы 10, поступает на полупрозрачное зеркало 24, отразившись от которого попадает на зеркало 25 и затем на фотоэлементы 27, 28 матрицы 26, которая измеряет углы наклона щита относительно горизонтальной и вертикальной плоскостей. Установка двух зеркал 24 и 25 увеличивает точность измерения угловых координат.
При отсутствии углов наклона щита относительно горизонтальной и вертикальной плоскостей щита луч оптического задатчика направления 1 падает на центр матрицы 26 и равномерно освещает фотоэлементы 27, 28. При этом сигналы на выходе устройств сравнения 30 равны нулю. Когда имеет место наличие углов наклона относительно горизонтальной плоскости α и углов относительно вертикальной плоскости β, луч оптического задатчика направления 1 перемещается по фотоэлементам 27, 28. В результате освещенность одних фотоэлементов увеличивается, а других уменьшается, что приводит к появлению электрических сигналов Uα и Uβ на выходах устройств сравнения 30 и выходных усилителей 31, 32, пропорциональных углам отклонения оси щита в горизонтальной и вертикальной плоскостях.
Эти напряжения поступают в блок управления по четырем координатам 5. Для устранения влияния изменения интенсивности задающего луча оптического задатчика направления 1 на измерения углов наклона относительно горизонтальной плоскости и относительно вертикальной плоскости в цепи отрицательных обратных связей выходных усилителей 31 и 32 включены фоторезисторы соответственно 33 и 34, которые освещаются лучом, проходящим через полупрозрачное зеркало 24. При изменении интенсивности задающего луча изменяется сопротивление фотоэлементов-фоторезисторов 33 и 34, в результате изменяются коэффициенты усиления выходных усилителей 31 и 32, в результате чего выходные напряжения Uα и Uβ остаются неизменными. При работе на криволинейных участках трассы в функции пройденного расстояния производится отклонение луча в плане посредством блока 2. На устройство сравнения 39 этого блока поступают аналоговые сигналы с блоков 3 и 9. С блока 9 поступает аналоговый сигнал, пропорциональный требуемому углу поворота луча, с блока 3 - аналоговый сигнал, пропорциональный действительному углу поворота луча: разностный сигнал, усиленный усилителем 38, включает электродвигатель 37 и производится поворот призмы 35. При повороте призмы на требуемый угол сигналы на входе устройства сравнения 39 равны по величине и противоположны по знаку, поэтому на выходе устройства сравнения сигнал равен нулю и привод отключается. Поворот луча производится через заданные отрезки пройденного щитом расстояния (например, 0,5 м -1,0 м) сигналом, поступающим из блока задания угла поворота 9. Призма 35 блока 2 поворачивает луч в горизонтальной плоскости, что вызывает изменение освещенности фотоэлементов 43 блока 3, это приводит к появлению сигнала на выходе элемента сравнения 46 и включению электродвигателя 48. Электродвигатель 48 перемещает матрицу 41 и подвижную часть датчика 50 измерения перемещений. Аналоговый сигнал с датчика 50 поступает через усилитель 51 на вход устройства сравнения 39 блока 2.
При движении щита механизм перемещения 55 щита посредством путевого выключателя 54 включает шаговый искатель 53. Движок шагового искателя перемещается по ламелям, выдает через секционированный потенциометр 52 сигнал на вход устройства сравнения 39 блока 2.
Измерение углов наклона щита осуществляется блоком 6, представляющим собой следящую измерительную систему. В качестве чувствительного элемента в блоке используются электролитический датчик 56, который с резисторами 57 и 58 образует мост. Датчик 56 устанавливается в нулевое положение с помощью винта 59, при этом мост сбалансирован и разность потенциалов в диагонали моста равна нулю. При наклонении щита нарушается равновесие моста, и сигнал поступает через усилитель 60 на управляемую обмотку электродвигателя 61, который через редуктор 62 перемещает датчик в нулевое положение. Как только датчик займет нулевое положение, двигатель остановится. Величина поворота вала редуктора, пропорциональная углу наклона, преобразуются в электрический сигнал индуктивным датчиком 63. Таким образом получается аналоговый электрический сигнал, пропорциональный углам наклона.
Следящая система в блоке измерения углов наклона 6 использована с целью увеличения линейной части характеристики датчика. С помощью сигнала об углах наклона вводятся поправки ΔUx и ΔUy в линейные координаты x и y проходческого щита. Для получения поправок ΔUx и ΔUy используются функциональные преобразователи 64, 65 и задатчик 66.
В блоке наблюдателя состояния 7 сигнал, поступающий от блока измерения углов наклона 6, проходит ряд преобразований, изображенных на фиг.3. На выходе блока наблюдателя состояния получаем сумму сигналов о текущем положении щита со своими весовыми коэффициентами в вертикальной и горизонтальной плоскостях. Данные сигналы поступают на входы сумматоров 71, 72.
В блоке управления 5 сумматором 67 вычисленная поправка ΔUx складывается с координатой Ux и на выходе сумматора 67 получается сигнал U1X=Ux±ΔUx. В сумматоре 68 вычисленная поправка ΔUy складывается с координатой Uy и на выходе получается сигнал U1Y=UY±ΔUY. Далее в сумматоре 69 поправка по углу наклона Uα складывается с U1X и на выходе получается сигнал U2X =U1X+Uα. Далее в сумматоре 70 поправка по углу наклона Uβ складывается с U1Y и на выходе получается сигнал U2Y=U1Y+Uβ. Далее в сумматоре 71 сигнал о недостающих координатах состояния в горизонтальной плоскости U3X складывается с U2x и на выходе получается сигнал U4X=U2X+U3X. Далее в сумматоре 72 сигнал о недостающих координатах состояния в вертикальной плоскости U3Y складывается с U2Y и на выходе получается сигнал U4Y=U2Y+U3Y.
Управляющий сигнал U4X поступает на входы реле, которые включают посредством электрогидрозолотников гидродомкраты для управления щитом в горизонтальной плоскости 73,74,…,n. Управляющие сигналы U4Y поступают на входы реле, которые включают гидродомкраты для управления щитом в вертикальной плоскости 75,76,…,m.
Таким образом, данное изобретение позволяет повысить точность и надежность управления передвижением щита тоннелепроходческого комплекса. Сущность изобретения заключается в том, что управление щитом осуществляется в двух плоскостях (горизонтальная и вертикальная система управления). В каждой из систем осуществляется релейное управление, причем функция переключения формируется путем вычитания из задания координат объекта (угол отклонения от оси, производная угла отклонения от оси (угловая скорость), перемещение относительно начала координат, производная перемещения относительно начала координат (линейная скорость)) со своими весовыми коэффициентами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МИНИ-ЩИТА ДЛЯ СТРОИТЕЛЬСТВА МИНИ-ТОННЕЛЕЙ | 2009 |
|
RU2405937C1 |
| Система управления движением проходческого щита | 1982 |
|
SU1073455A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1979 |
|
SU825939A1 |
| Способ разработки месторождений полезных ископаемых подземным способом с использованием тоннелепроходческих механизированных комплексов | 2022 |
|
RU2801989C1 |
| Система позиционирования проходческого комплекса в пространстве | 2019 |
|
RU2733256C1 |
| Устройство для автоматического управления положением горнопроходческой машины в плане и профиле пласта | 1978 |
|
SU754060A1 |
Изобретение относится к системам автоматизированного управления в горной промышленности и может быть использовано в системе управления проходческим щитом. Техническим результатом является повышение точности и надежности управления передвижением щита тоннелепроходческого комплекса. Способ управления щитом тоннелепроходческого комплекса заключается в том, что управление щитом осуществляют в двух плоскостях посредством систем управления по вертикали и по горизонтали. При этом с помощью измерительной техники определяют углы наклона исполнительного органа относительно вертикальной и горизонтальной плоскостей, сигналы по скорости изменения угла наклона относительно вертикальной и горизонтальной плоскостей, линейные перемещения в вертикальной и горизонтальной плоскостях и скорости изменения линейного перемещения в вертикальной и горизонтальной плоскостях. Вышеперечисленные сигналы подают на блок управления по четырем координатам, где их сравнивают с заданием, после чего на основании сигналов рассогласования формируют релейный закон управления исполнительным органом. Предложена также следящая система управления щитом тоннелепроходческого комплекса, которая содержит последовательно соединенные оптический задатчик направления, блок отклонения луча, диафрагму, фотоэлектрическое приемное устройство и блок управления по четырем координатам, вход которого соединен с блоком измерения углов наклона. При этом устройство дополнительно содержит блок наблюдателя состояния, который своим входом соединен с блоком измерения углов наклона, а выходом - с блоком управления. 2 н.п. ф-лы, 4 ил.
1. Способ управления щитом тоннелепроходческого комплекса, заключающийся в том, что управление щитом осуществляют в двух плоскостях посредством систем управления по вертикали и по горизонтали, при этом с помощью измерительной техники определяют углы наклона исполнительного органа относительно вертикальной и горизонтальной плоскостей, затем формируют сигналы по вышеуказанным углам наклона и подают их на блок управления, где их сравнивают с заданием, после чего на основании сигналов рассогласования формируют релейный закон управления исполнительным органом тоннелепроходческого комплекса, отличающийся тем, что для формирования закона управления дополнительно определяют сигналы по скорости изменения угла наклона относительно вертикальной и горизонтальной плоскостей, линейные перемещения в вертикальной и горизонтальной плоскостях, скорости изменения линейного перемещения в вертикальной и горизонтальной плоскостях и подают их на блок управления, выполненный в виде блока управления по четырем координатам.
2. Следящая система управления щитом тоннелепроходческого комплекса, содержащая последовательно соединенные оптический задатчик направления, блок отклонения луча, диафрагму, фотоэлектрическое приемное устройство, блок управления, вход которого также соединен с блоком измерения углов наклона, отличающаяся тем, что в нее введен дополнительный блок наблюдателя состояния, своим входом соединенный с блоком измерения углов наклона, а выходом с блоком управления по четырем координатам.
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| Устройство управления движением проходческого щита | 1980 |
|
SU949188A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПРОХОДЧЕСКОГОЩИТА | 1979 |
|
SU825939A1 |
| Система управления движением проходческого щита | 1982 |
|
SU1073455A1 |
| Автомобиль с двумя направляющими осями | 1925 |
|
SU7197A1 |
| СИСТЕМА КОНТРОЛЯ ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ МИНИ-ЩИТА ДЛЯ СТРОИТЕЛЬСТВА МИНИ-ТОННЕЛЕЙ | 2009 |
|
RU2405937C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| JP 08114448 A, 07.05.1996 | |||
| Колодка для формирования и сушки валяной обуви | 1986 |
|
SU1496760A1 |
| СУХИНИН Б.В | |||
| и др | |||
| Синтез электрических следящих приводов, оптимальных по точности, учебное пособие | |||
| - Тула, 1992, с.94-107. | |||

