Изобретение относится к дроблению различных материалов и может быть использовано во многих отраслях народного хозяйства, в частности в черной и цветной металлургии. Известно устройство для контроля и регулирования разгрузочной щели конусной инерционной дробилки, принцип действия которого основан на-преобразовании угла j откло-нения дробящегося конуса от вертикали в электрический сигнал, который ставится в соответствии с размером S разгрузочной щели. Это устройство содержит датчик, выполненный в виде цилиндра, в полости которого размещен подпружиненный щток, один конец которого, снабжен роликом, взаимодействующим с подвижным дробящим конусом, а второй конец связан с чувствительным элементом, управляющим разгрузочной щелью дробилки 1. Недостаток устройства - наличие механического взаимодействия датчика с контролируемым элементом, соверщающим сложное вращательное движение внутри корпуса дробилки, что не oбecпeчивaet больщой надежности и точности устройства. Известно также устройство для контроля и регулирования разгрузочной щели конусной инерционной дробилки, содержащее преобразователь угла отклонения контролируемого элемента, блок регулирования разгрузочной щели и блок выключения привода дробилки 2. В устройстве измеритель параметра j выполнен в виде индуктивных датчиков, расположенных через 90° вокруг щарового щпинделя в кольдевой кассете, закрепленной в расточке подщипни.ка. Недостатки этого устройства - сложность извлечения информации от датчиков указанного типа (индуктивных), так как восстановить движение контролируемого элемента здесь можно лищь путем специальной и довольно сложной обработки сигналов от двух пар датчиков; с помощью индуктивных датчиков можно контролировать лищь относительно небольщие перемещения (практически не более 20мм), что приемлемо только для дробилок малых типоразмеров (собственно этот вариант реализован на дробилках с диаметром конуса 300 и 600мм) Для дробилок с диаметром конуса 1750 и 2200 мм, которые разработаны в последние годы, использовать указанные датчики не
представляется возмо йным. Это объясняется тем, что в этих дробилках надо контролировать перемещения в пределах до 50мм; последнее требует расширения диапазона измерений в сравнении с известным; индуктивные датчики в известном устройстве располагаются вокруг шарового шпинделя в кольцевой кассете, закрепленной в расточке подшипника. На практике такое взаимное расположение датчиков и шарового шпинделя оказалось приемлемым только для дробилок малых типоразмеров; что же касается дробилок больших типоразмеров, то здесь выявлены определенные неудобства монтажа этого узла, поскольку у больших дробилок масса шарового шпинделя и дебаланса достаточно велика, что нередко вызывает в процессе сборки и разборки этого узла повреждения датчиков или же требует специальной заш,иты датчиков от опрокидывания шарового шпинделя, что сложно реализовать. Цель изобретения - повышение надежности работы устройства.
Указанная цель достигается тем, что устройство для контроля и регулирования разгрузочной щели конусной инерционной дробилки, содержашее преобразователь угла отклонения контролируемого элемента, блок регулирования разгрузочной шели и блок выключения привода дробилки, снабжено блоком обработки сигнала, указателем размера разгрузочной щели, компаратором и регистром сдвига, а преобразователь угла отклонения контролируемого .элемента выполнен в виде несущих катушек и постоянных магнитов, расположенных неподвижно вокруг контролируемого элемента полюсами радиально по отношению к вертикальной оси корпуса дробилки, причем вход и первый выход блока обработки сигнала подключены к несущим катушкам преобразователя угла отклонения контролируемого элемента, второй выход блока обработки сигнала соединен с указателем размера разгрузочной шели, третий выход соединен через компаратор со входом регистра сдвига, один из выходов которого подключен к блоку выключения привода дробилки, а другой к блоку регулирования разгрузочной шели.
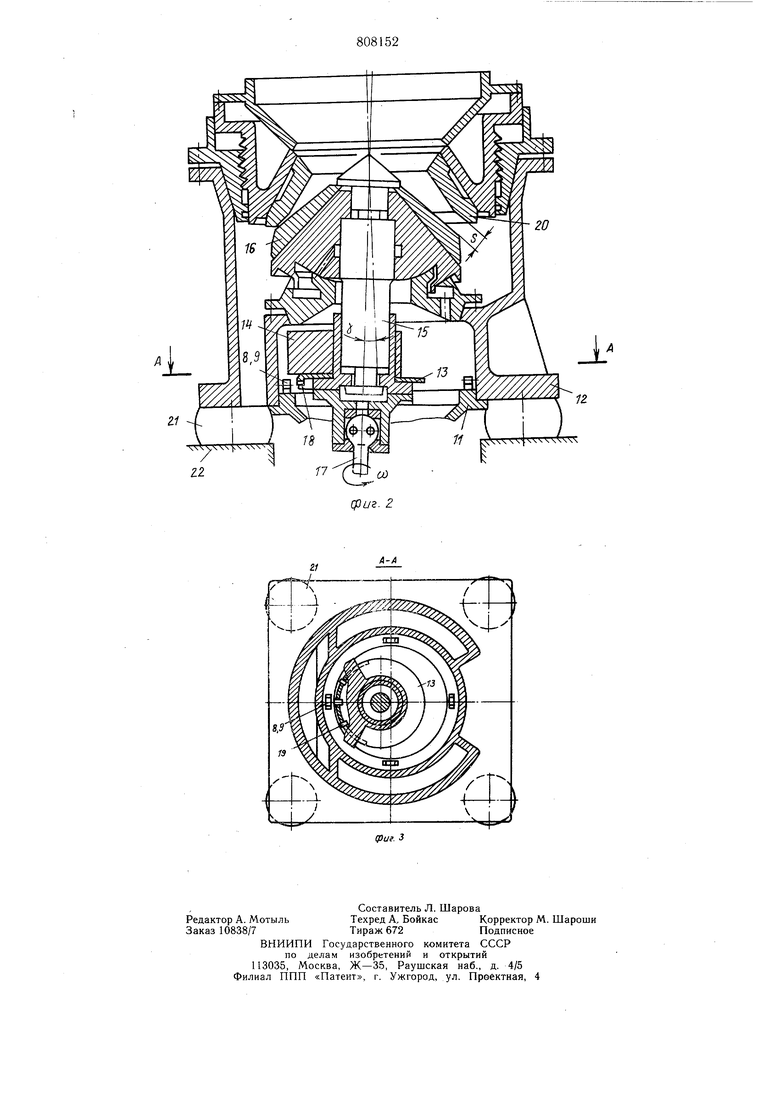
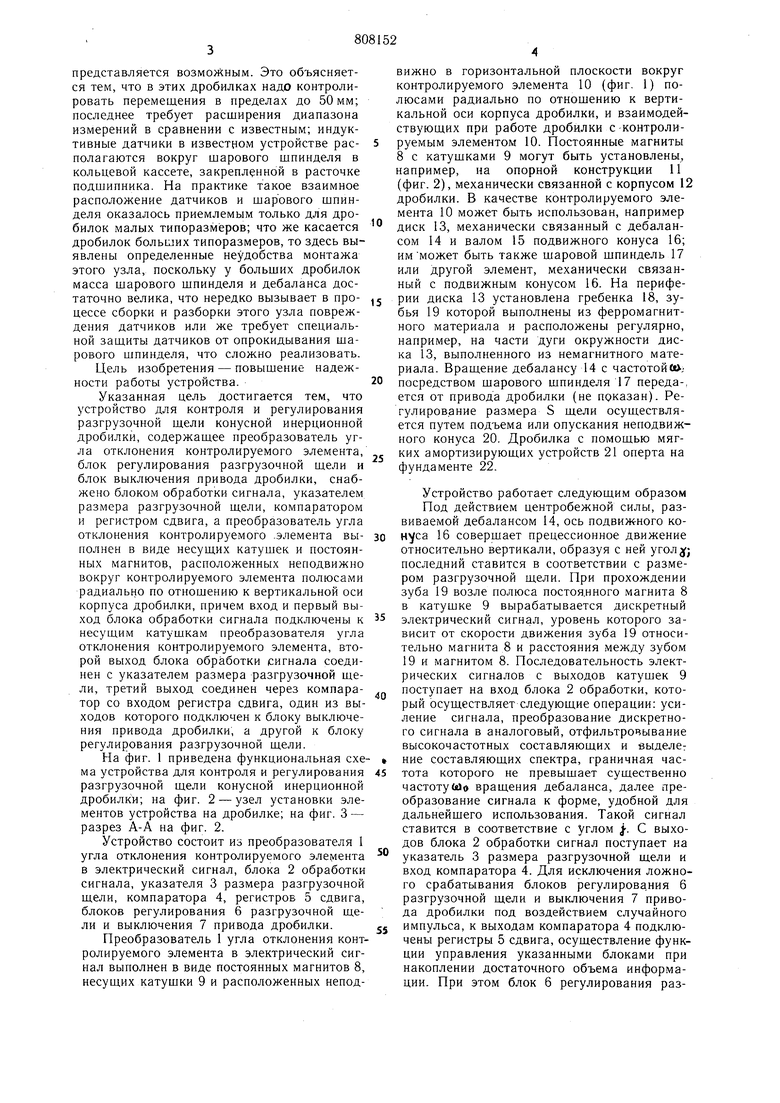
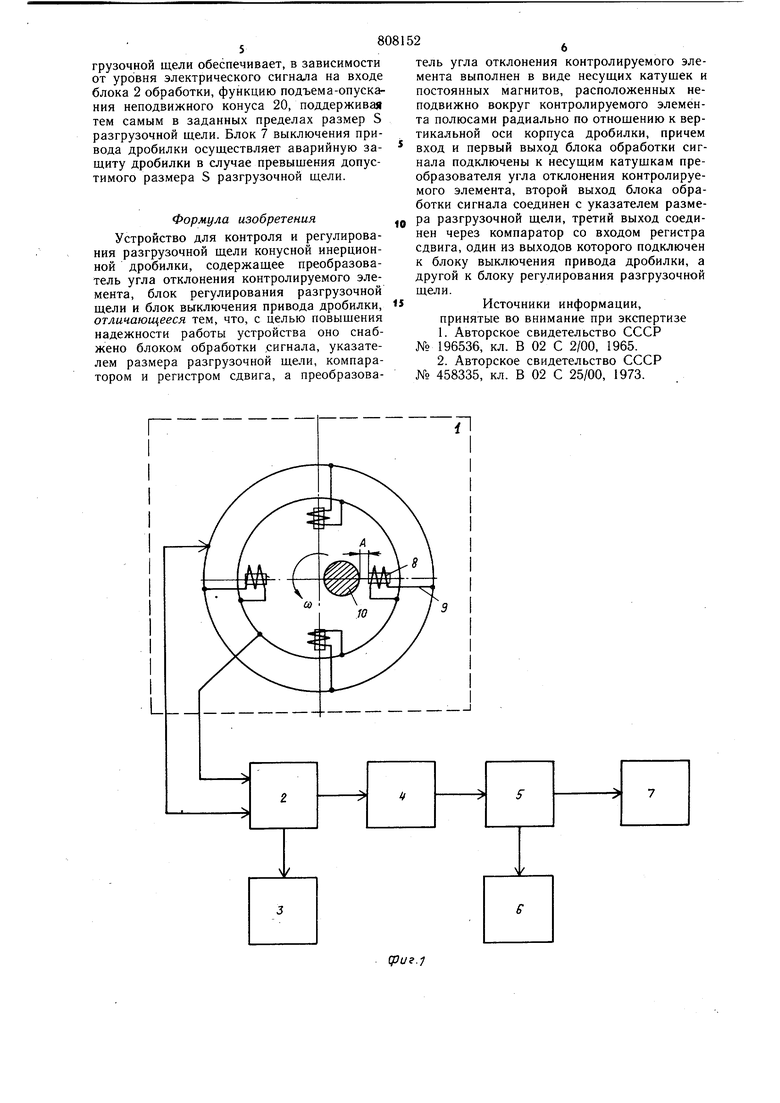
На фиг. 1 приведена функциональная схе ма устройства для контроля и регулирования разгрузочной щели конусной инерционной дробилки; на фиг. 2-узел установки элементов устройства на дробилке; на фиг. 3 - разрез А-А на фиг. 2.
Устройство состоит из преобразователя 1 угла отклонения контролируемого элемента в электрический сигнал, блока 2 обработки сигнала, указателя 3 размера разгрузочной щели, компаратора 4, регистров 5 сдвига, блоков регулирования 6 разгрузочной щели и выключения 7 привода дробилки.
Преобразователь 1 угла отклонения контролируемого элемента в электрический сигнал выполнен в виде постоянных магнитов 8, несущих катушки 9 и расположенных неподвижно в горизонтальной плоскости вокруг контролируемого элемента 10 (фиг. 1) полюсами радиально по отношению к вертикальной оси корпуса дробилки, и взаимодействующих при работе дробилки с контролируемым элементом 10. Постоянные магниты 8 с катушками 9 могут быть установлены, например, на опорной конструкции 11 (фиг. 2), механически связанной с корпусом 12 дробилки. В качестве контролируемого элемента 10 может быть использован, например диск 13, механически связанный с дебалансом 14 и валом 15 подвижного конуса 16; имможет быть также шаровой шпиндель 17 или другой элемент, механически связанный с подвижным конусом 16. На периферии диска 13 установлена гребенка 18, зубья 19 которой выполнены из ферромагнитного материала и расположены регулярно, например, на части дуги окружности диска 13, выполненного из немагнитного материала. Вращение дебалансу 14 с частотой ; посредством шарового шпинделя 17 переда-, ется от привода дробилки (не показан). Регулирование размера S шели осуществляется путем подъема или опускания неподвижного конуса 20. Дробилка с помощью мягких амортизирующих устройств 21 оперта на фундаменте 22.
Устройство работает следующим образом Под действием центробежной силы, развиваемой дебалансом 14, ось подвижного конуса 16 совершает прецессионное движение относительно вертикали, образуя с ней угол jj последний ставится в соответствии с раз.мером разгрузочной щели. При прохождении зуба 19 возле полюса постоянного магнита 8 в катушке 9 вырабатывается дискретный электрический сигнал, уровень которого зависит от скорости движения зуба 19 относительно магнита 8 и расстояния между зубом 19 и магнитом 8. Последовательность электрических сигналов с выходов катушек 9 поступает на вход блока 2 обра.ботки, который осуществляет следующие операции: усиление сигнала, преобразование дискретного сигнала в аналоговый, отфильтровывание высокочастотных составляющих и выделе: ние составляющих спектра, граничная частота которого не превышает существенно частоту(в)о вращения дебаланса, далее преобразование сигнала к форме, удобной для дальнейщего использования. Такой сигнал ставится в соответствие с углом J-. С выходов блока 2 обработки сигнал поступает на указатель 3 размера разгрузочной щели и вход компаратора 4. Для исключения ложного срабатывания блоков регулирования 6 разгрузочной щели и выключения 7 привода дробилки под воздействием случайного импульса, к выходам компаратора 4 подключены регистры 5 сдвига, осуществление функции управления указанными блоками при накоплении достаточного объема информации. При этом блок 6 регулирования разгрузочной щели обеспечивает, в зависимости от уровня электрического сигнала на входе блока 2 обработки, функцию подъема-опускания неподвижного конуса 20, поддерживая тем самым в заданных пределах размер S разгрузочной щели. Блок 7 выключения привода дробилки осуществляет аварийную защиту дробилки в случае превыщения допустимого размера S разгрузочной щели.
Формула изобретения
Устройство для контроля и регулирования разгрузочной щели конусной инерционной дробилки, содержащее преобразователь угла отклонения контролируемого элемента, блок регулирования разгрузочной щели и блок выключения привода дробилки, отличающееся тем, что, с целью повыщения надежности работы устройства оно снабжено блоком обработки .сигнала, указателем размера разгрузочной щели, компаратором и регистром сдвига, а преобразователь угла отклонения контролируемого элемента выполнен в виде несущих катушек и постоянных магнитов, расположенных неподвижно вокруг контролируемого элемента полюсами радиально по отношению к вертикальной оси корпуса дробилки, причем
вход и первый выход блока обработки сигнала подключены к несущим катушкам преобразователя угла отклонения контролируемого элемента, второй выход блока обработки сигнала соединен с указателем размеpa разгрузочной щели, третий выход соединен через компаратор со входом регистра сдвига, один из выходов которого подключен к блоку выключения привода дробилки, а другой к блоку регулирования разгрузочной щели. Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 196536, кл. В 02 С 2/00, 1965.
2.Авторское свидетельство СССР № 458335, кл. В 02 С 25/00, 1973.
П
фиг- 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля разгрузочной щели конусной инерционной дробилки | 1977 |
|
SU940844A1 |
| Устройство для контроля и регулирования угла нутации конуса инерционной дробилки | 1986 |
|
SU1416181A1 |
| Способ контроля и регулирования угла нутации конуса инерционной дробилки и устройство для его осуществления | 1984 |
|
SU1217474A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПАРАМЕТРАМИ КОНУСНОЙ ДРОБИЛКИ | 2007 |
|
RU2337756C1 |
| Устройство для контроля режима работы конусной инерционной дробилки | 1980 |
|
SU1068165A1 |
| Устройство для регулирования угла нутации конуса инерционной дробилки | 1985 |
|
SU1286283A1 |
| Устройство для определения мощности дробления материала в конусной инерционной дробилке | 1982 |
|
SU1052263A1 |
| Конусная инерционная дробилка | 1979 |
|
SU814446A1 |
| Конусная инерционная дробилка | 1987 |
|
SU1424864A1 |
| Устройство для регулирования разгрузочной щели конусной эксцентриковой дробилки | 1978 |
|
SU749429A1 |