эо
00 СП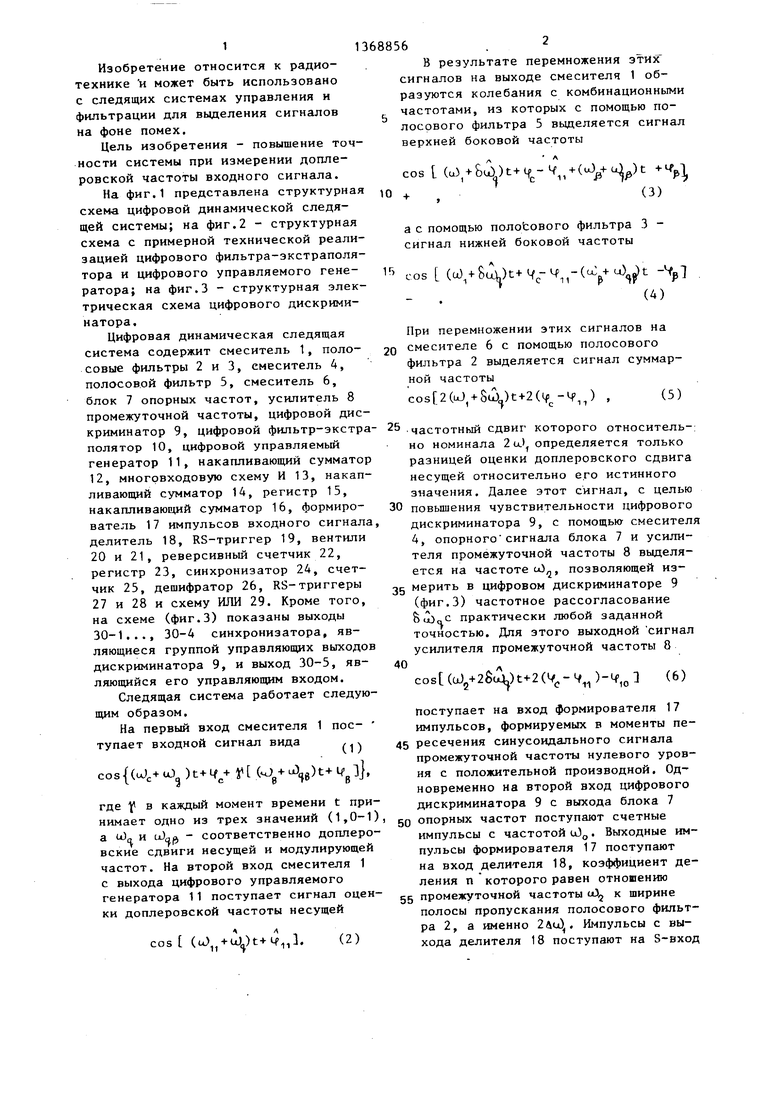
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая динамическая следящая система | 1986 |
|
SU1368857A1 |
| Следящий измеритель частоты | 1985 |
|
SU1298675A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| Цифровая динамическая следящая система | 1985 |
|
SU1285428A1 |
| КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2003 |
|
RU2254594C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2079148C1 |
| ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1993 |
|
RU2067771C1 |
| МНОГОКАНАЛЬНЫЙ ПРИЕМОИНДИКАТОР СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2001 |
|
RU2205417C2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
Изобретение относится к радиотехнике и может быть применено в следящих системах управления и фшты- рации для выделения слабых частотно- модулированных информационными символами радиосигналов, принимаемых на фоне помех. Цель изобретения - повышение точности цифровой динамической следящей системы. Повышение точности измерения доплеровской частоты несущей достигается выделением верхней и нижней составляющих спектра входного сигнала, перемножением этих составляющих между собой и выделением сигнала суммарной частоты, содержащей удвоенный доплеровский сдвиг несущей частоты входного сигнала, который и отслеживается системой. Цифровая динамическая следящая система содержит цифровой управляемый генератор 11, смесители 1, 6 и 4,полосовые фильтры 2, 3 и 5, усилитель 8 гфомежуточной частоты, цифровой дискриминатор 9, цифровой фильтр-экстраполятор 10 и блок 11 опорных частот. Цифровая динамическая следящая система использует для измерения доплеровского сдвига входного сигнала 90-95Z его знергии и позволяет на порядок повысить точность измерения доплеровской частоты. 3 ил. с (Л
Фиг.1
1
Изобретение относится к радиотехнике и может быть использовано с следящих системах управления и фильтрации для выделения сигналов на фоне помех.
Цель изобретения - повышение точности системы при измерении допле- ровской частоты входного сигнала.
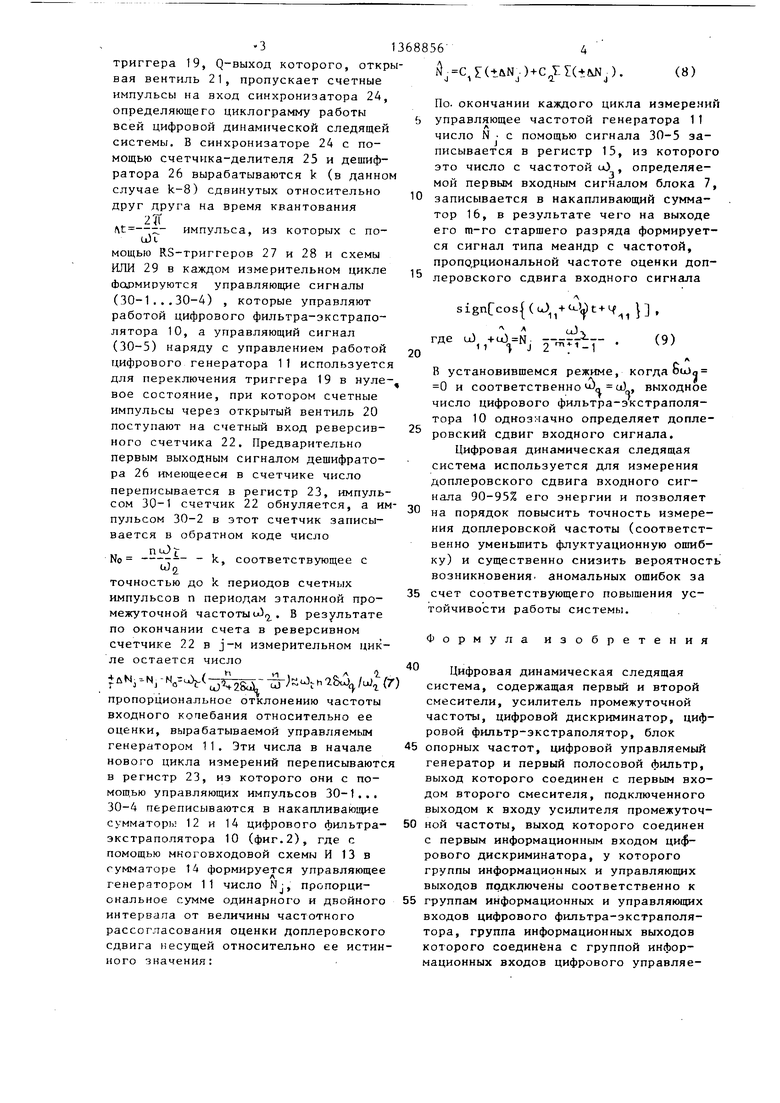
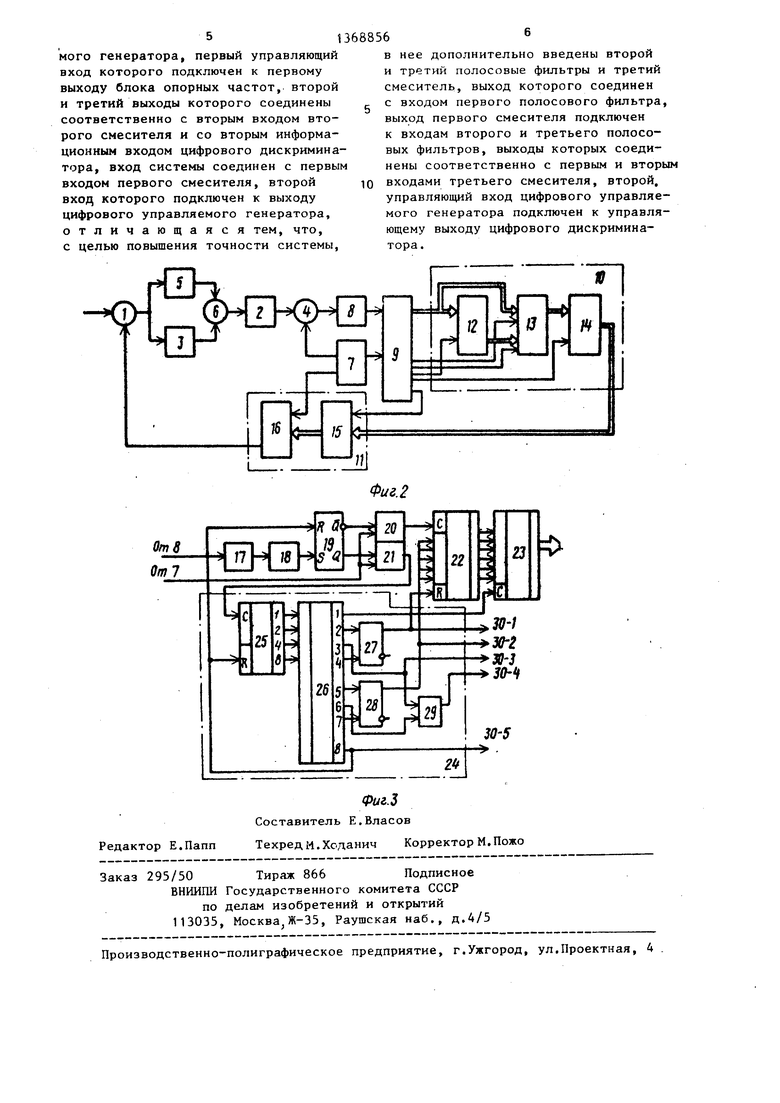
На фиг.1 представлена структурная схема цифровой динамической следящей системы; на фиг.2 - структурная схема с примерной технической реализацией цифрового фильтра-экстраполя- тора и цифрового управляемого гене- ратора; на фиг.З - структурная электрическая схема цифрового дискриминатора.
Цифровая динамическая следящая система содержит смеситель 1, поло- совые фильтры 2 и 3, смеситель 4, полосов.ой фильтр 5, смеситель 6, блок 7 опорных частот, усилитель 8 промежуточной частоты, цифровой дискриминатор 9, цифровой фильтр-экстра полятор 10, цифровой управляемый генератор 11, накапливающий сумматор 12, многрвходовую схему И 13, накапливающий сумматор 14, регистр 15, накапливающий сумматор 16, формирователь 17 импульсов входного сигнала делитель 18, RS-триггер 19, вентили 20 и 21, реверсивный счетчик 22, регистр 23, синхронизатор 24, счетчик 25, дешифратор 26, RS-триггеры 27 и 28 и схему ИЛИ 29. Кроме того, на схеме (фиг.З) показаны выходы 30-1..., 30-4 синхронизатора, являющиеся группой управляю1цих выходов дискриминатора 9, и выход 30-5, яв- ляющийся его управляющим входом.
Следящая система работает следующим образом.
На первый вход смесителя 1 пос- тупает входной сигнал вида
(1) cos{(cJ -t-tO )t- V )
где
в каждый момент времени t принимает одно из трех значений (1,0-1) а и и)ар - соответственно доплеро- вские сдвиги несущей и модулирующей частот. На второй вход смесителя 1 с выхода цифрового управляемого генератора 11 поступает сигнал оценки доплеровской частоты несущей
cos (i,,
4j)t+if,,
L
(2)
В результате перемножения этих сигналов на выходе смесителя 1 образуются колебания с комбинационными частотами, из которых с помощью полосового фильтра 5 выделяется сигнал верхней боковой частоты
cos I (u),-t-&u)), + (u3pfu pt f, ь ,(3)
a с помощью полоЬового фильтра сигнал нижней боковой частоты
3 cos (a)/S(4j)t+ Ч- ,, - .(4)
При перемножении этих сигналов на смесителе 6 с помощью полосового фильтра 2 выделяется сигнал суммарной частоты
(uJ -t-Su))t+2() , (5)
частотный сдвиг которого но номинала 2 и.
относитель-; определяется только разницей оценки доплеровского сдвига несущей относительно его истинного значения. Далее этот сигнал, с целью повышения чувствительности цифрового дискриминатора 9, с помощью смесителя 4, опорного сигнала блока 7 и усилителя промежуточной частоты 8 выделяется на частоте и), позволяющей из- мерить в цифровом дискриминаторе 9 (фиг.З) частотное рассогласование )aC практически любой заданной точностью. Для этого выходной сигнал усилителя промежуточной частоты 8
cos(a),,-b28i2)()-i,l (6)
Поступает на вход формирователя 17 импульсов, формируемых в моменты пе45 ресечения синусоидального сигнала промежуточной частоты нулевого уровня с положительной производной. Одновременно на второй вход цифрового дискриминатора 9 с выхода блока 7
50 опорных частот поступают счетные
импульсы с частотой иЗ. Выходные импульсы формирователя 17 поступают на вход делителя 18, коэффициент деления п которого равен отношению
55 промежуточной частоты иЗ к ширине полосы пропускания полосового фильтра 2, а именно 24и). Импульсы с выхода делителя 18 поступают на S-вход
3
триггера 19, Q-выход которого, открывая вентиль 21, пропускает счетные импульсы на вход синхронизатора 24, определяющего циклограмму работы всей цифровой динамической следящей системы. В синхронизаторе 24 с помощью счетчика-делителя 25 и дешифратора 26 вырабатываются k (в данном случае k-8) сдвинутых относительно друг друга на время квантования
2 Л
u)i
импульса, из которых с помощью RS-триггеров 27 и 28 и схемы ИЛИ 29 в каждом измерительном цикле (Ьоиэмируются управляющие сигналы (30-1 ... 30-4) , которые управляют работой цифрового фильтра-экстрапо- лятора 10, а управляющий сигнал (30-5) наряду с управлением работой цифрового генератора 11 используется для переключения триггера 19 в нулевое состояние, при котором счетные импульсы через открытый вентиль 20 поступают на счетный вход реверсивного счетчика 22. Предварительно первым выходным сигналом дешифратора 26 имеющееся в счетчике число
переписывается в регистр 23, импульсом 30-1 счетчик 22 обнуляется, а импульсом 30-2 в этот счетчик записывается в обратном коде число
ri t , - k, соответствующее с
UJg
точностью до k периодов счетных импульсов п периодам эталонной промежуточной частоты iJij. В результате по окончании счета в реверсивном счетчике 22 в j-м измерительном цикле остается число
t,-,() пропорциональное отклонению частоты входного колебания относительно ее оценки, вырабатываемой управляемым генератором 11. Эти числа в начале нового цикла измерений переписываютс в регистр 23, из которого они с помощью управляющих импульсов 30- 1 ... 30-4 переписываются в накапливающие сумматорь 12 и 14 цифрового фильтра- экстраполятора 10 (фиг.2), где с помощью многовходовой схемы И 13 в сумматоре 14 формируется управляющее генератором 11 число Nj, пропорциональное сумме одинарного и двойного интервала от величины частотного рассогласования оценки доплеровского сдвига есущей относительно ее истинного значения:
И, С r(t&N.)-t-C rZdcJJ,). (8)
J 1J J.J
По. окончании каждого цикла измерений управляющее частотой генератора 11 число N с помощью сигнала 30-5 за- регистр 15, из которого
писывается в
это число с частотой и) , определяемой первым входным сигналом блока 7, записывается в накапливающий сумматор 16, в результате чего на выходе его т-го старшего разряда формируется сигнал типа меандр с частотой, пропо,рциональной частоте оценки доплеровского сдвига входного сигнала
signCcos{(oJ -t- t-i-4 } ,
где
0
и) +u)N 11 - J
.. 2 1 1
(9)
5
0
5
В установившемся режиме, когда Ьып 0 и соответственно сО, выходное число цифрового фильтра-экстраполя- тора 10 однозначно определяет допле- ровский сдвиг входного сигнала.
Цифровая динамическая следящая система используется для измерения доплеровского сдвига входного сигнала 90-95% его энергии и позволяет на порядок повысить точность измерения доплеровской частоты (соответственно уменьшить флуктуационную ошибку) и существенно снизить вероятность возникновения, аномальных ошибок за счет соответствующего повышения устойчивости работы системы.
Формула изобретения
Цифровая динамическая следящая система, содержащая первый и второй смесители, усилитель промежуточной частоты, цифровой дискриминатор, цифровой фильтр-зкстраполятор, блок
45 опорных частот, цифровой управляемый генератор и первый полосовой фильтр, выход которого соединен с первым входом второго смесителя, подключенного выходом к входу усилителя промежуточ50 ной частоты, выход которого соединен с первым информационным входом цифрового дискриминатора, у которого группы информационных и управляющих выходов подключены соответственно к
55 группам информационных и управляющих входов цифрового фильтра-экстраполя- тора, группа информационных выходов которого соединена с группой информационных входов цифрового управляе
| ЦИФРОВАЯ ДИНАМИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU348979A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая динамическая следящая система | 1985 |
|
SU1285428A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
