г/
Изобретение относится к радиотехнике и может быть использовано в следящих системах управления и фильтрации для выделения сигналов на фоне
помех.
Цель изобретения - повышение точности системы при измерении допле- ровской частоты входного сигнала.
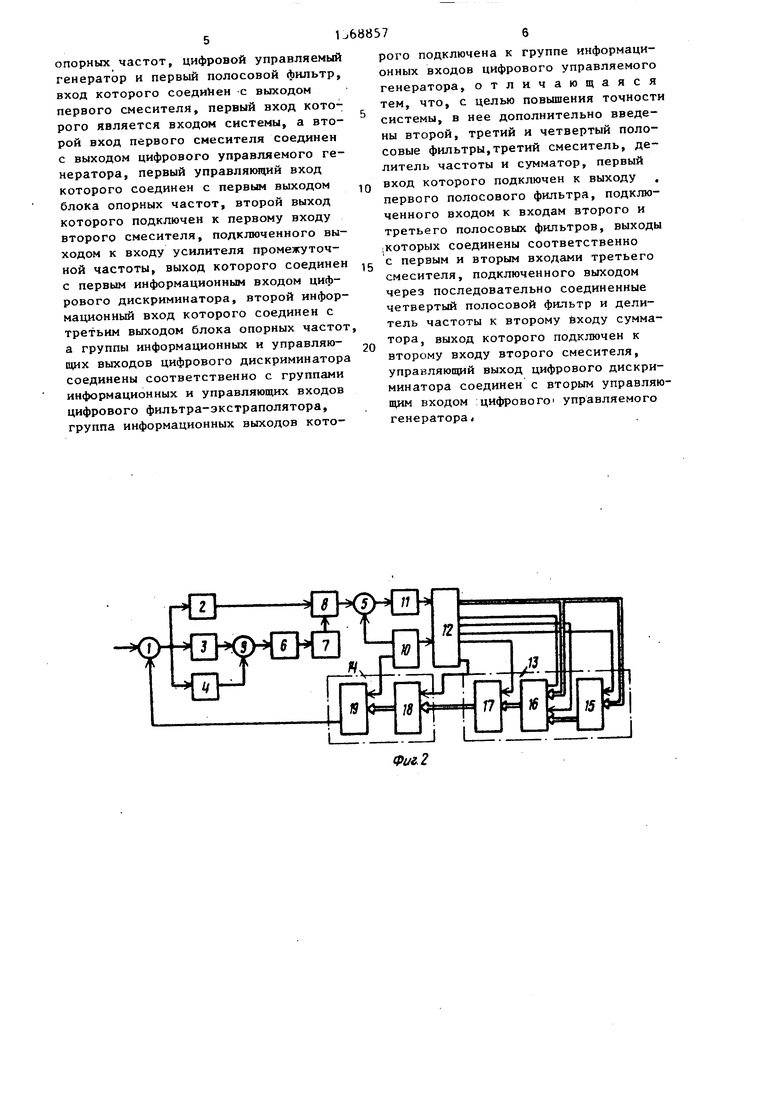
На фиг.1 представлена структурная схема цифровой динамической следящей системы; на фиг.2 - структурная схема с примерной технической реализацией цифрового фильтра-экстраполято- ра и цифрового управляемого генера- тора; на фиг.З - структурная схема цифрового дискриминатора.
Цифровая динамическая следящая система содержит смеситель 1, полосовые фильтры 2-4, смеситель 5, по- лосовой фильтр 6, делитель 7 частоты сумматор 8, смеситель 9, блок 10 опорных частот, усилитель 11 промежуточной частоты, цифровой дискриминатор 12, цифровой фильтр-экстрапо- лятор 13, цифровой управляемый генератор 14, накапливающий сумматор 15, многовходовую схему И 16, накапливающий сумматор 17, регистр 18, накапливающий сумматор 19, формирователь 20 импульсов входного сигнала, делитель 21, RS-триггер 22, вентили 23 и 24, реверсивный счетчик 25, регист 26, синхронизатор 27, счетчик 28, дешифратор 29, RS-триггеры 30 и 31 и схему ИЛИ 32. Кроме того, на схеме фиг.З показаны группа управляющих выходов 33-1...33-4 синхронизатора и управляющий выход 33-5.
Следящая система работает следующим образом.
На первый вход смесителя 1 поступает входной сигнал вида
cos (u)-t-u.) +7(u)p-t- )t+ if к: , (1)
где у в каждый момент времени t принимает одно из трех значений (1,0-1), а
U).. - соответственно допле
О), и
ровские сдвиги несущей и модулирующей частот. На второй вход смесителя 1 с выхода цифрового управляемого генератора 14 поступает сигнал оценки доплеровской частоты несущей
cos ( ) )t
(2)
В результате перемножения этих сигналов на выходе смесителя 1 образуются колебания с комбинационными частотами, из которых с помощью первого полосового фильтра 2 выделяется сигнал средней частоты
cos(u),-t-c u Jt-t-w - g,J,
(3)
с помощью второго полосового фильтра 3 сигнал верхней боковой частоты
созГ(и1, + с/ ы )t-f (,+(u)p- w.).
(4)
а с помощью третьего полосового фильтра 4 сигнал нижней боковой час
тоты
cos(ui,) )t-bg -ij,-())t -.,.(5)
При перемножении сигналов верхней и нижней боковых частот на смесителе 9 с помощью четвертого полосового фильтра 6 выделяется сигнал суммарной частоты
cost2(u., )t+2((/,) , (6)
который, пройдя через делитель 7 (на два) частоты, когерентно суммируется в сумматоре 8 с выходным сигналом первого полосового фильтра 2, Далее выходной сигнал сумматора 8, с целью повышения чувствительйости цифрового дискриминатора 12, с помощью смесителя 5, опорного сигнала блока 10 и усилителя 11 промежуточной частоты преобразуется на относительно низкую промежуточную частоту (л)„, что позволяет измерить в цифро- вом дискриминаторе 12 (фиг.З) частотное рассогласование w. с практически любой заданной точностью. Дпя этого выходной сигнал усилителя 11 промежуточной частоты
50
cos()(f,,-ifj
(7)
поступает на вход формирователя 20 импульсов, формируемых в моменты пересечения синусоидального сигнала промежуточной частоты нулевого уровня с положительной производной. Одновременно на второй вход цифрового дискриминатора 12 с выхода блока 10
опорных частот поступают счетные импульсы с частотой ш . Выходные импульсы формирователя 20 поступают на вход делителя 31, коэффициент деления которого п равен отношению промежуточной частоты к полосе пропускания полосового фильтра 2 (или половине полосы пропускания полосового фильтра 6)2Jw,, Импульсы с делителя 21 поступают на З-вход триггера 22, Q-выход которого, открывая вентиль 25, пропускает счетные импульсы на вход синхронизатора 27, определяющего циклограмму работы всей цифровой динамической следящей системы. В синхронизатора 27 с помощью счетчика-делителя 28 и дешифратора 29 вырабатываются k (в данном случае k-8) сдвинутых относительно друг друга на (вриоД частоты счетных импульсов управляющих импульсов, и.ч которых с помощью RS-триггеров 30 31 и схемы ЩИ 32 в каж1-ом измерительном цикле формируются управляющие сигналы 33-1...33-4, которые управляют работой цифрового фгшьтра- экстраполятора 13, а упраиляющий сигнал 33-5, наряду с угразлрчием работой цифровог о генератора iS, используется для переключения триг1 ера 22 в нулевое состояние, при котором счетные импулъсы через OTicphiTba вентиль 23 поступают на счетный вход реверсивного счетчика 25. Предварительно первым выходным импульсом дешифратора 29 имеющееся в счетчике 25 число переписывается в регистр 26, импульсом 33-1 счетчик 25 обиу3688574
рений переписыв.айг тся в регистр 26, из которого они с помощью управляю- ,цих импульсов 33-1, . . . , 33-4 переписываются в накапливающие с т маторы 15 и 17 цифрового фильтра-экстрапо- лятора 13 (фиг.2, где с использованием многовходовой схемы И 16 в сумматоре 17 формируется управляющее
Л
генератором 14 число N-, пропорциональное сумме одинарного и двойного интеграла от величины частотного рассогласования оценки доплеровского несущей относительно ее истинного значения
10
15
N.C,I (t4N-)-C,,lT(i-dN ).
(9)
По окончании каждого цикла измере- HHi i управляющее частотой генератора 14 число NJ с помощью сигнала 33-5 записываете;; в регистр 18, из кото 3
определяемой первым выходным сигналом блока Ю, записывается в накапливаюпр1й г,;- :-1млтор 19, в результате чего на выходе его ш-го старшего разряда формируется сигнал типа меандр, с частотой, пропорциональной частоте оцен- iM; -чоплеровского сдвига входного сиг- ;ала
(((j, .)t+ 1.,{
u),,.
2
-1
(10)
li установившемся режиме, когда .0 и соответственно ui, w , выходное число цифре вого фильтра экстра

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая динамическая следящая система | 1986 |
|
SU1368856A1 |
| Цифровая динамическая следящая система | 1985 |
|
SU1285428A1 |
| Следящий измеритель частоты | 1985 |
|
SU1298675A1 |
| Цифровая динамическая следящая система | 1985 |
|
SU1290249A1 |
| Цифровая динамическая следящая система | 1980 |
|
SU890358A1 |
| Следящий измеритель частоты | 1978 |
|
SU766024A1 |
| Цифровая динамическая следящая система | 1981 |
|
SU962846A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ МОНОИМПУЛЬСНАЯ РЛС | 2011 |
|
RU2497146C2 |
| КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2003 |
|
RU2254594C1 |

Изобретение относится к радиотехнике и может быть применено в следящих системах управления и фильтрации для выделения слабых частотно- модулированных информационными символами радиосигналов, принимаемых на фоне помех. Цель изобретения - повышение точности цифровой динамической следящей системы. Повышение точности измерения доплеровской частоты несущей в системе достигается выделением верхней, центральной и нижней составляющих спектра входного сигнала, перемножением верхней и нижней составляющих между собой, ввде- лением суммарной частоты этих составляющих, делением ее на два и суммированием с центральной составляющей. Суммарный сигнал отслеживается системой по частоте. Цифровая динамическая следящая система содержит включенные в кольцо автоподстройки частоты цифровой управляемый генератор 14, смесители 1, 5 и 9, полосовые фильтры 2-4 и 6, сумматор 8, делитель 7 частоты (на два) усилитель 11 промежуточной частоты, цифровой дискриминатор 12, цифровой фильтр- экстраполятор 13, блок 10 .опорных частот. Цифровая динамическая следящая система использует для измерения доплеровского сдвига входного сигнала всю его энергию и позволяет на порядок повысить точность измерения Доплеровской частоты. 3 ил. W со О) 00 00 ел 
ляется, а импульсом 33-2 в этот 40 полятора 13 однозначно определяет
ло N
- k, соответствующее
чик записывается в обратном коде чис (j{
с точностью до k периодов счетных импульсов п периодам эталонной промежуточной частоты cxJj. В результате по окончании счета в реверсивном счетчике 25 в j-м измерительном цикле остается число
Ыл
)
ol/t n ci UJ
:i
u)
пропорциональное отклонению частоты входного колебания относительно ее оценки, вырабатываемой цифровым управляемым генератором 14, Эти числа в начале каждого нового цикла изме
-
45
50
55
доплеровскии сдвиг входного сигнала.
Цифровая динамическая следящая система использует для измерения донлеровского сдвига входного сигнала всю его энергию и позволяет на порядок повысить точность измерения доп- леровской частоты (соответственно уменыш-гть флуктуационную ошибку) и существенно снизить вероятность возникновения аномальных ошибок за счет соответствующего повышения устойчивости работы С1{стемы.
Формула изобретения
Цифровая динамическая следящая система, содержащая первый и второй смесители, усилитель промежуточной частоты, цифровой дискриминатор, цифровой фильтр-экстраполятор, блок
опорных частот, цифровой управляемый генератор и первый полосовой фильтр, вход которого соединен с выходом первого смесителя, первый вход которого является входом системы, а второй вход первого смесителя соединен с выходом цифрового управляемого генератора, первый управляющий вход которого соединен с первым выходом блока опорных частот, второй выход которого подключен к первому входу второго смесителя, подключенного выходом к входу усилителя промежуточной частоты, выход которого соединен с первым информационным входом цифрового дискриминатора, второй информационный вход которого соединен с третьим выходом блока опорных частот а группы информационных и управляющих выходов цифрового дискриминатора соединены соответственно с группами информационных и управляющих входов цифрового фильтра-экстраполятора, группа информационных выходов кото,
10
688576
рого подключена к группе информационных входов цифрового управляемого генератора, отличающаяся тем, что, с целью повышения точности системы, в нее дополнительно введены второй, третий и четвертый полосовые фильтры,третий смеситель, делитель частоты и сумматор, первый вход которого подключен к выходу . первого полосового фильтра, подключенного входом к входам второго и третьего полосовых фильтров, выходы |Которых соединены соответственно с первым и вторым входами третьего смесителя, подключенного выходом через последовательно соединенные четвертый полосовой фильтр и делитель частоты к второму йходу сумматора, выход которого подключен к второму входу второго смесителя, управляющий выход цифрового дискриминатора соединен с вторым управляющим входом :ЦИФРОВОГО управляемого генератора
15
20
Фиг. 5
| ЦИФРОВАЯ ДИНАМИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 0 |
|
SU348979A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая динамическая следящая система | 1985 |
|
SU1285428A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
