Изобретение относится к радиотехнике.
Известен следящий измеритель частоты входного сигнала, содержащий последовательно соединенные смеси- 5 тель, усилитель промежуточной частоты, первый ключ, управлякхций вход которого параллельно с управлягевдим входом второго ключа через блок обнаружения сигнала соединен со вторым 10 выходом усилителя промежуточной частоты, цифровой дискриминатор, счетный вход которого соединен с блоком опорных частот, а установочный вход подключен к выходу блока памяти,циф- 5 ровой фильтр-экстрапОлятор п-го порядка и преобразователь код-частота,соединенный со вторым входом первого смесителя, а также блок целеуказания и измерения частоты .1 .20
Однако известный следящий измеритель частоты входного сигнгша не обладает необходимой точностью опреде,ления закона изменения частоты.
Цель изобретения - повышение точности определения закона изменения частоты.
Для этого в следящем измерителе частоты входного сигнала, содержащем ЗО
последовательно соединенные смеситель, уси.питель промежуточной частоты, первый ключ, управляющий вход которого парашлельно с управляющим входом второго ключа через блок обнаружения сигнала соединён со вторым выходом усилителя промежуточной частоты, цифровой дискриминатор, счетный вход которого соединен с блоком опорных частот, а у :тановочный вход подключен к выходу блока памяти,цифровой фильтр-экстраполятор п-го порядка и преобразователь код-частота, соединенный со входом первого смесителя, а также блок целеуказания и измерения частоты, между выходом блока целеуказания и измерения частоты и входом смесителя включены последовательно дополнительные преобразователь код-частота и смеситель, другой вход которого является входом устройства, к выходам блока целеуказания и измерения частоты и цифрового фильтра-экстраполятора п-го порядка подключен цифровой сумматор, выход
25 которого через второй ключ соединен с входом блока целеуказания и измерения частоты.
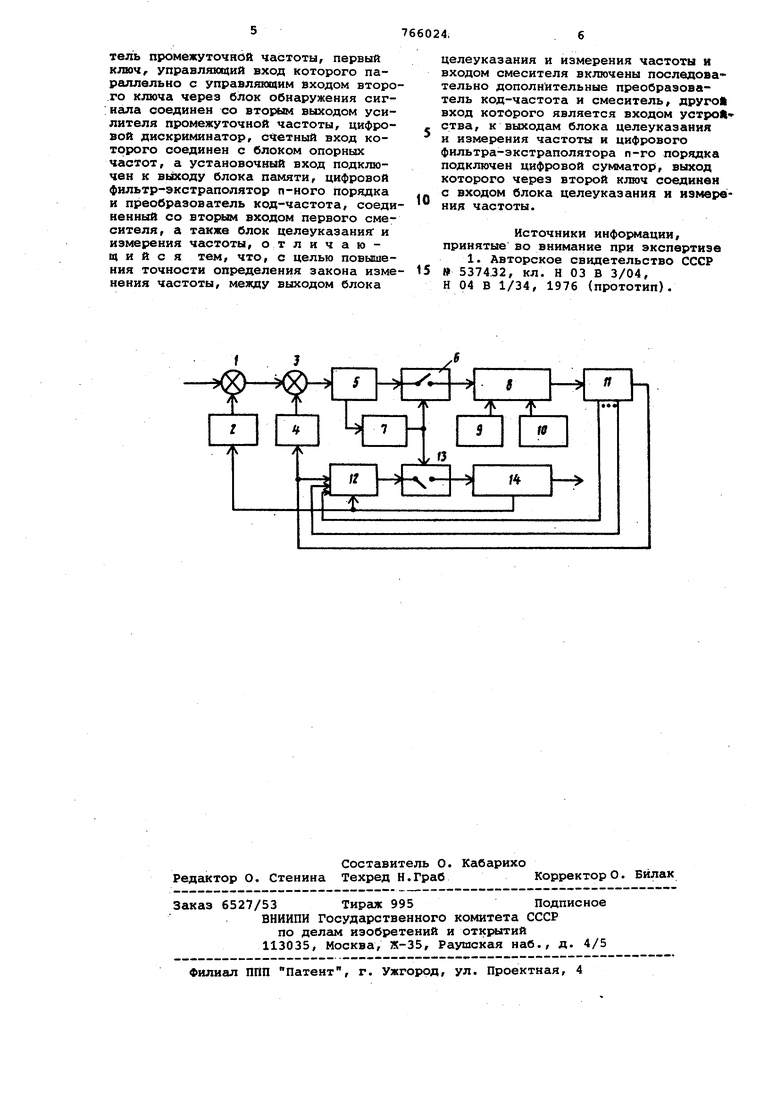
На чертеже представлена структурная электрическая схема предлагаемоГО следящего измерителя частоты входного сигнала.
Следящий измеритель содержит смеситель 1, преобразователь 2 код-частота, смеситель 3 преобразователь 4 код-частота, усилитель 5 промежуточной частоты, ключ б, блок 7 обнаружения сигнаг1а, цифровой дискриминатор 8, блок 9 опорных частот, блок 10 памяти,цифровой фильтр-экстраполятор 11 п-го порядка, цифровой сумматор 12, ключ 13, блок 14 целеуказания и измерения частоты.
Следящий измеритель частоты работает следующим образом.
Работа устройства разделена на два этапа (режима): обнаружение входного сигнала с последующей синхронизацией по доплеровскому изменению частоты, отслеживанию этого изменения, измерению текущих значений частоты и определению закона изменения доплеровской частоты входного сигнала- (на чертеже состояние обоих ключей соответствует режиму обнаружения сигнала).
Входной сигнал поступает на один вход смесителя 1, на второй вход которого поступает выходной сигнал грубого преобразователя 2 код-частота, частота которого определяется блоком 14 целеуказания и измерения частоты входного сигнала с учетом ожидаемого значения доплеровского сдвига. Выходной сигнал смесителя 1 поступает на первый вход смесителя 3, на второй вход которого поступает выходной сигнал точного преобразователя 4 код-частота. При совпадении доплеровской частоты входного сигнала с ее ожидаемым значением на выходе усилителя 5 вьщеляется сигнал промежуточной частоты, который поступает на вход блока 7 обнаружения сигнала.
При превыщении этим сигналом за данного порога на выходе блока 7 -формируется управляющий сигнал, который замыкает ключи 6 и 13 и переводит работу следящего измерителя частоты в режим синхронизации отслеживания доплеровского сдвига и определения закона изменения доплеровской частоты входного сигнала. Сиггал промежуточной частоты в этом режиме через замкнутый ключ б поступает на сигнальный вход цифрового дискриминатора 8, работающего как периодомер, временные (мерные) интервалы которого равны целому числу К периодов сигнала промежуточной частоты ff,p интервалы изме,ряются путем подсчета счетных импульсов опорной частоты, поступаиадих из блока 9. Образуквдееся при этом число N., пропорциональное длительности мерного интервала сравнивается в дискриминаторе 8 с постоянным числом NP .записываемым из блока 10 памяти в дополнительном коде перед каждым циклом измерений. В результате на выходе дискриминатора 8 в каящом цикле измерений формируется число, равное разности чисел счетных импуль/сов в мерном интервале и в эталонном с интервале, соответствующих аналогичному числу периодов номинальной промежуточной частоты:.
Kf.-i,
-l--i V
,-f r-/u;,).(-J
C-f ng fnJ
... ° np
Сигнал рассогласования AN в цифровом виде с выхода дискриминатора 8 поступает в цифровой фильтр-экстраполятор 11, содержащий вобщем случае
п реверсивных счетчиков (накапливающих сумматоров), на выходе которых формируется управляющее число N,пропорциональное сумме одинарного, двойного, тройного и так далее вплоть до
п-го порядка интеграла от величины
рассогласования. Это число Nyуправляет преобразователем 4 код-частота таким образом, что закон изменения частоты выходного сигнала преобразователя 4 строго соответствует закону
изменения сигнала, поступающего на вход смесителя 3. В данном случае следящий фильтр, образованный смесителем 3, усилителем 5/ дискриминатором 8, фильтром-экстраполятором 11
и преобразователем 4 код-частота, отслеживает не полный доплеровский диапазон частоты входного сигнала, а лишь разницу между текущим значением доплеровской частоты входного
сигнала и частотой сигнала целеуказания, поступающего на второй вход смесителя 1 с выхода преобразователя 2 код-частота и задаваемого числом целеуказания NU, блока 14. Числа,формируемые на выходе цифрового сумматора 12 N Ny + Мцу и поступающие через ключ 13 на вход блока 14, в режиме синхронизации строго соответствуют текущим значениям доплеровской частоты входного сигнала. Наряду
с текущими значениями цифровых отсчетов доплеровской частоты N с вы-. хода цифрового фильтра-экстраполятора 11 через сумматор 12 и ключ 13 в блок 14 поступают и цифровые отсчеты всех (п-1) первых производных текущих значений доплеровской частоты, снимаемые с выходов реверсивных счетчиков (накапливающих сумматоров) цифрового фильтра-экстраполятора 11.
Технико-экономическая эффективность следящего измерителя.частоты заключается в повышении точности определения закона изменения частоты.
Формула изобретения
Следящий измеритель частоты входного сигнала, содержащий последовательно соединенные смеситель, усилитель промежуточной частоты, первый ключг управляющий вход которого параллельно с управляющим входом второго ключа через блок обнаружения сиг;нгша соединен со вторым выходом усилителя промежуточной частоты, цифровой дискриминатор, сметный вход которого соединен с блоком опорных частот, а установочный вход подключен к вь1ходу блока памяти, цифровой фильтр-экстраполятор п-ного порядка и преобразователь код-частота, соединенный со входом первого смесителя, а также блок целеуказания и измерения частоты, отличающийся тем, что, с целью повышения точности определения закона изменения частоты, между выходом блока
целеуказания и измерения частоты и входом смесителя включены последова тельно дополнительные преобразователь код-частота и смеситель, другой вход которого является входом устроЦ ства, к выходам блока целеуказания и измерения частоты и цифрового фнльтра-экстраполятора п-го порядка подключен цифровой сумматор, выход которого через второй ключ соединен с входом блока целеуказания и измерения частоты.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 537432, кл. Н 03 В 3/04, Н 04 В 1/34, 1976 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоподстройки частоты приемника | 1975 |
|
SU537432A1 |
| Цифровая динамическая следящая система | 1980 |
|
SU890358A1 |
| Следящий измеритель частоты | 1985 |
|
SU1298675A1 |
| Цифровая динамическая следящая система | 1981 |
|
SU962846A1 |
| Цифровая динамическая следящая система | 1986 |
|
SU1368857A1 |
| Цифровая динамическая следящая система | 1986 |
|
SU1368856A1 |
| Цифровая динамическая следящая система | 1985 |
|
SU1285428A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
