098 J5
(Л
00
о со СП
1370357
12 и 13, которые перемещают втулки 3 и 4 по валу-кулачку. 1 в осевом направлении о При этом втулки 6 и 7 перемещаются только в радиальном направлении и устраняют радиальные зазоры в волновом зацеплении. Биметаллические пластинки 32 и 33 предназначены для перемещения втулок 6 и 7 в осевом направлении вместе с гибким подшипником относительно венца гибкого колеса 11, что устраняет перекос в волновом зацеплении, 3 ил.



| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЛНОВАЯ ГЕРМЕТИЧНАЯ ПЕРЕДАЧА АБРАМОВА В.А. | 2012 |
|
RU2551556C2 |
| ВОЛНОВАЯ ПЕРЕДАЧА С ДВУМЯ ДЕФОРМИРУЕМЫМИ ЗУБЧАТЫМИ ИЛИ ФРИКЦИОННЫМИ КОЛЕСАМИ АБРАМОВА В.А. | 2015 |
|
RU2597055C1 |
| Привод | 1987 |
|
SU1442750A1 |
| Устройство для диагностики подшипников качения | 1985 |
|
SU1278648A1 |
| РЕГУЛИРУЕМЫЙ ДИСКОВЫЙ ГЕНЕРАТОР ВОЛНОВОЙ ПЕРЕДАЧИ | 2007 |
|
RU2350810C1 |
| ВОЛНОВОЙ СЕРВОМЕХАНИЗМ СО СТАБИЛИЗАЦИЕЙ ФОРМЫ ВОЛНЫ ДЕФОРМАЦИИ (ВАРИАНТЫ) | 1999 |
|
RU2169298C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ/РАЗБОРКИ ВОЛНОВОЙ ГЕРМЕТИЧНОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ Абрамова В.А. | 2014 |
|
RU2568626C1 |
| ВОЛНОВАЯ ТОРЦЕВАЯ ПЕРЕДАЧА СО СКРЕЩИВАЮЩИМИСЯ ВАЛАМИ | 1982 |
|
SU1839827A1 |
| Волновая передача | 1991 |
|
SU1796808A1 |
| Гидродинамический гироскоп | 2021 |
|
RU2769078C1 |

Изобретение относится к машиностроению и может быть использовано в качестве отсчетно-силового редуктора. Цель изобретения - повышение кинематической точности волновой передачи путем устранения радиальных зазоров и осевых перекосов в системе гибкое колесо - генератор. От источников 26 и 31 питания ток подается на биметаллические пластинки
1
Изобретение относится к машиностроению и может быть использовано в качестве отсчетно-силового редуктора.
Цель изобретения - повьш1ение кинематической точности волновой передачи путем устранения как радиальных зазоров, так и осевых перекосов в системе гибкое колесо - генератор ,
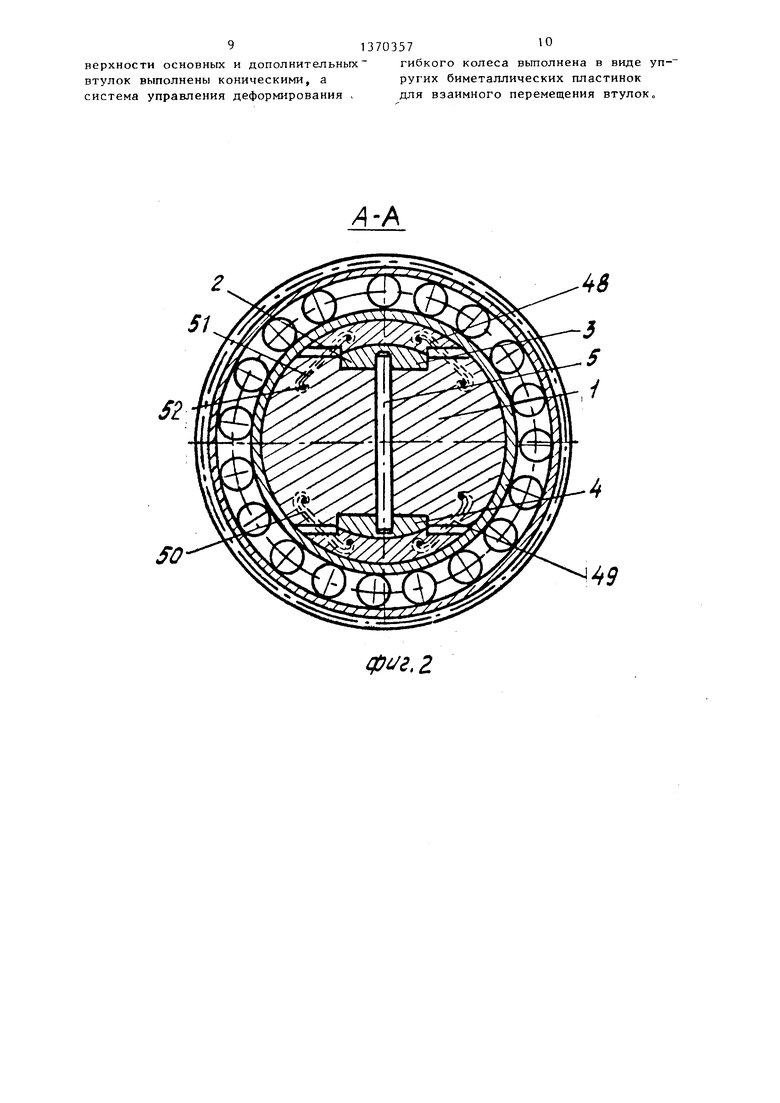
На фиг, 1 показана волновая передача; на фиг, 2 - сечение А-А на фиг, 1; на фиг о 3 - сечение Б-Б на фиг, 1,
Волновая передача содержит вал- кулачок 1 (фиг, 1 и 2) с продольными пазами 2, установленные в них втулки 3 и 4, фиксируемые в окружном направлении щтифтом 5 и имеющие заклинивающие конические наружные поверхности, сопряженные с ними дополнительные втулки 6 и 7 с внутренними клиновыми коническими поверхностями, гибкий подшипник с кольцами 8 и 9 и телами 10 качения, гибкое ко лесс 11 и систему управления деформированием гибкого колеса 11, выполненную в виде упругих биметаллических плаотинок 13 и 12, предназначенных для осевого перемещения втулок 3 и 4 установленных в полимерных направляющих 14 и поджатых крышками 15, Одни торцы биметаллических пластинок 12 и 13 прикреплены к соответствующим втулкам 4 и 3, а другие поджаты через изолирующие прокладки 16 гайками 17, Для фиксации взаимодействия тел 10 качения в системе гибкое колесо 1 1 - вал-кулачок 1 применяются бесконтактные датчики 18 и 19 перемещения (например индуктивные или емкостные), установленные на кронштейнах 20, Выход бесконтактного датчика 18 перемещения соединен с
10
15
20
25 0
5
0
входом усилителя 21 напряжения, первый выход которого связан с первым входом блока 22 сравнения, второй вход которого связан с задатчиком 23, Выход блока 22 сравнения соединен последовательно с интегратором 24 и ключом 25, выход которого соединен с входом регулируемого источника 26 питания, выходы последнего соединены с биметаллическими пластинками 12, Выход бесконтактного датчика 19 перемещения связан с входом усилителя 27 напряжения, выход которого связан с первым входом блока 28 сравнения, второй вход которого соединен с вторым выходом усилителя 21 напряжения, а выход блока 28 сравнения последовательно соединен с интегратором 29 и ключом 30, выход которого связан с входом регулируемого источника 31 питания, выходы последнего соединены с биметаллическими .пластинками 13,
Осевые перемещения втулок 6 и 7 осуществляются биметаллическими пластинками 32 и 33, которые установлены в полимерных направляющих 34 и поджаты крьш1ками 35, Одни торцы биметаллических пластинок 32 и 33 прикреплены к соответствующим втулкам 6 и 7, а другие поджаты через изолирующие прокладки 36 гайками 36,
Передача также снабжена датчиками 38 и 39 деформации гибкого колеса 1 1 и наружного кольца 9 гибкого подшипника, установленными на наружной поверхности гибкого колеса 11 по обе стороны его зубчатого венца. Выход датчика 38 соединен с входом усилителя 40 напряжения, выход которого связан с первым входом блока 41 разности. Выход датчика 39 связан с входом усилителя 42 напряжения, выход которого связан с вторым входом блока 41 разности, выход которого соединен с регулируемым знакочув- ствительным блоком 43 питания, а его выходы связаны с биметаллическими пластинками 32 и 33.
Втулки 6 и 7 связаны с валом-кулачком 1 (фиг. 2 и 3) биметаллическими пластинками 44-47 и 48-51, надетыми на штифты 52. Токоподвод к биметаллическим пластинкам 44 и 46 и 48 и 50 осуществляется регулируемым источником 53 питания, а к биметаллическим пластинкам 45 и 47 и 49 и 51 - регулируемым источником 54 питания.
Передача работает следующим образом.
Вал-кулачок 1 (фиг. 2) посредством втулок 3 и 4, установленных в его пазах 2, симметричных относительно большой оси кулачка, и втулок 6 и 7 деформирует гибкое колесо 11 (фиг. 1) через кольца 8 и 9 и тела 10 качения гибкого подшипника. От проворота втулки 3 и 4 фиксируются боковыми сторонами паза 2 (фиг. 2). Угол наклона клиновых поверхностей втулок 3 и 4 обеспечивает самоторможение втулок 6 и 7 при действии на них радиальных нагрузок. От осевого смещения втулки 3 и 4 фиксируются биметаллическими пластинками 12 и 13 (фиг. 1).
Дополнительное радиальное дефор10
15
кими пластинками 32 и 33,поэтому при осевом перемещении втулок 3 и 4 втулки 6 и 7 перемещаются только в радиальном направлении, осуществляя дополнитель ное деформирование гибкого колеса 11 До начала работы необходимо произ вести выставку бесконтактных датчиков 18 и 19 относительно тел 10 каче ния гибкого подшипника. Подавая ток от блока 13 питания на биметаллические пластинки 32 и 33, фиксируют ; втулки 6 и 7 в осевом направлении (фиг. 1). Далее, подавая ток от регулируемого источника 26 питания на биметаллическую пластину 12, добиваются требуемой одной волны деформации гибкого колеса 11 (величину деформирования контролируют индикатором) . Затем бесконтактный датчик 18 перемещения устанавливают в кронштейне 20 таким образом, чтобы зазор между телом 10 качения гибкого подшипника и торцом датчика был равен 25 О,1-2 мм. После этого кронштейн 20 закрепляют на крьш1ке 15 направляющей 14 в плоскости большой оси генератора. Направляющие 14 от окружного проворота закрепляются на вале- кулачке 1. Сигнал от бесконтактного датчика 18 перемещения фиксируется в задатчике 23 (эталонный сигнал). Далее бесконтактный датчик 19 перемещения устанавливают во втором кронштейне 20 таким образом, чтобы
20
30
мирование гибкого колеса 11 (фиг. 1), рабочие торцы обоих датчиков быпи в
необходимое для устранения радиальных зазоров в зацеплении, произво- . дится следуюш 1м образом.
На биметаллические пластинки 12 и 13 подается ток от регулируемых источников 26 и 31 питания. Пластинки 12 и 13 нагреваются и деформируются, но так как их левые торцы через изолирующие прокладки 16 поджаты гайками 17, а сами они установлены в направляющих 14 и поджаты крьш1ками 15, то деформироваться могут только их правые торцы, прикрепленные к соответствующим втулкам 3 и 4. Правые торцы пластинок 12 и 13, деформируясь, перемещают втулки 3 и 4 по валу-кулачку 1 влево или вправо в зависимости от увеличения или уменьшения тока от регулируемых источников питания 26 и 31 по сравнению с первоначальным током.-В это время втулки 6 и 7 от осевого перемещения зафиксированы биметалличес
кими пластинками 32 и 33,поэтому при осевом перемещении втулок 3 и 4 втулки 6 и 7 перемещаются только в радиальном направлении, осуществляя дополнительное деформирование гибкого колеса 11. До начала работы необходимо произвести выставку бесконтактных датчиков 18 и 19 относительно тел 10 качения гибкого подшипника. Подавая ток от блока 13 питания на биметаллические пластинки 32 и 33, фиксируют ; втулки 6 и 7 в осевом направлении (фиг. 1). Далее, подавая ток от регулируемого источника 26 питания на биметаллическую пластину 12, добиваются требуемой одной волны деформации гибкого колеса 11 (величину деформирования контролируют индикатором) . Затем бесконтактный датчик 18 перемещения устанавливают в кронштейне 20 таким образом, чтобы зазор между телом 10 качения гибкого подшипника и торцом датчика был равен О,1-2 мм. После этого кронштейн 20 закрепляют на крьш1ке 15 направляющей 14 в плоскости большой оси генератора. Направляющие 14 от окружного проворота закрепляются на вале- кулачке 1. Сигнал от бесконтактного датчика 18 перемещения фиксируется в задатчике 23 (эталонный сигнал). Далее бесконтактный датчик 19 перемещения устанавливают во втором кронштейне 20 таким образом, чтобы
рабочие торцы обоих датчиков быпи в
0
5
одной плоскости. Второй кронштейн 20 с бесконтактным датчиком 19 перемещения закрепляют на крьш1ке 15 второй направляющей 14 аналогично первому, причем расстояния от оси вращения вала-кулачка 1 до осей бесконтактных датчиков 18 и 19 перемещения равны. Затем записывают биметаллические пластинки 13 от регулируемого источника 31 питания до тех пор, пока сигнал от датчика 10 не станет равным сигналу от датчика 18, т.е. вторая волна деформации гибкого колеса 11 не совпадает с первой.
При работе генератора поворот тел 10 качения гибкого подшипника относительно бесконтактных датчиков 18 и 19 перемещения вызывает в последних появление сигналов. Сигнал бесконтактного датчики 18 перемещения и усиливается усилителем 21 напряжения и поступает в блоки 22 и 28 сравнения. Одновременно с сиг0
5
налом и на второй вход блока 22 сравнения подается эталонный сигнал Ug из задатчика 23. В блоке 22 сравнения происходит сравнение сигналов и и и.|, и их разность подается на вход интегратора 24, который в случае, если разность сигналов (U и U) равна нулю, закрывает ключ 25, т.е. ток, подаваемый на биметаллическую пластинку 12 от регулируемого источника 26 питания, не изменяется, деформация гибкого колеса 11 равна требуемой. Одновременно с сигналом от датчика 18 сигнал U „ от датчика 19 подается на вход усилителя 27 напряжения, где усиливается и подает ся на первый вход блока 28 сравнения куда одновременно с ним подается сигнал и. от усилителя 21 напряжения. В блоке 28 сравнения происходит сравнение сигналов U и Uj от датчиков 18 и 19, и их разность () подается на вход интегратора 29, который в случае равенства этой разнос ти нулю закрывает ключ 30, т.е. ток подаваемый на биметаллическую пластинку 13 от регулируемого источника 31 питания, не изменяется, деформация гибкого колеса 11 во второй волне равна первой и равна требуемой. При увеличении зазоров в системе вал-кулачок 1 - гибкое колесо 11 (фиг. 1), например, в результате износа ось вращения тела 10 качения гибкого подшипника смещается в радиальном направлении, т.е. при изменении величины деформирования гибкого колеса 11 сигнал от датчика 18 перемещения усиливается усилителем 21 напряжения и подается в блок 22 сравнения, где сравнивается с эталонным сигналом из задатчика 23. Разность сигналов U,-U подается на интегратор 24, который включает ключ 25, я эта разность подается на вход регулируемого источника 26 питания, который изменяет пропорционально этому сигналу ток, проводимый к биметаллической пластинке 12. Последняя дополнительно деформируясь, перемещает втулку 3 в осевом направлении, которая в свою очередь, перемещает втулку 6 в радиальном направлении, дополнительно деформируя гибкий подщипник и гибкое колесо 11, на первом этапе регулирования получают одну из волн деформации гибкого колеса 11, равную
703576
требуемой (U, 113). Одновременно с
этим сигнал и„ с бесконтактного дат- 5
чика 19 перемещения через усилитель 27 напряжения поступает в блок 28 сравнения, где сравнивается с сигналом U| от бесконтактного датчика 18 перемещения, поступившим из усилителя 21 напряжения. Так как к этому 10 времени сигнал U стал равен U , то в блоке 28 сравнения получают разность сигналов . Эта разность подается на интегратор 29, который включает ключ 30, а также поступает 15 на вход регулируемого источника 31 питания, который изменяет пропорционально этому сигналу ток, подводимый к биметаллической пластинке 13. Последняя, дополнительно деформиру- 20 ясь, перемещает втулку 4 в осевом направлении, что вызывает перемещение втулки 7 в радиальном направлении, дополнительную деформацию гибкого подшипника и гибкого колеса 11, 25 т.е. на втором этапе регулирования получают вторую волну деформации гибкого колеса 11, равную первой и требуемой.
При сборке волновой зубчатой пезо редачи, а также при ее работе могут возникнуть перекос гибкого подшипника, т.е. кольца 9 относительно кольца 8 (фиг. 1), а значит, и гибкого колеса 11, а также осевые уси5
0
5
0
5
лия, особенно в передачах с герметичными гибками колесами. Для их компенсации генератор снабжен датчиками 38 и 39 деформации, установленными на гибком колесе 11 симметрично относительно зубчатого венца. Сигнал и. с датчика 38 деформаций усиливается усилителем 40 напряжения и поступает на первый вход блока 41 разности, на второй вход которого поступает предварительно усиленный на усилителе 42 напряжения сигнал и, с датчика 39 деформаций. В блоке 41 разности происходит сравнение сигналов и и и и их разность подается на вход регулируемого знако- чувствительного блока 43 питания, который в случае равенства этой разности нулю не изменяет тока, питающего биметаллические пластинки 32 и 33, т.е. деформация гибкого колеса 11 симметрична относительно зубчатого венца, и перекосов в системе гибкий подшипник - гибкое колесо 11 лет. Если
7
при работе передачи разность сигна- лов Uj-U с датчиков 38 и 39 деформации не равна нулю, например Uj и , то эта разность подается на вход регулируемого знакочувстви- тельного блока 43 питания, который увеличивает ток, подаваемый на биметаллические пластинки 32 и 33. Последние, дополнительно деформируясь, перемещают втулки 6 и 7 вправо вместе с гибким кольцом 8 гибкого подшипника до устранения перекоса колец 8 и 9, а значит, и гибкого колеса 11. Перемещение втулок 6 и 7 для компенсации перекосов в волновой передаче вызывает изменение формы деформирования гибкого колеса 11 относительно требуемой. Сигнал U с бесконтактного датчика 18 перемеще ния через усилитель 21 напряжения по ступает в блок 22 сравнения, где сравнивается с сигналом U из задат- чика 23. Разность сигналов U, и U
У
через интегратор 24, ключ 25 поступает на вход регулируемого источника 26 питания, который пропорционально этой разности изменяет гок, подаваемый на биметаллическую пластинку 12, последняя посредством втулок 3 и 6 и гибкого подшипника дополнительно деформирует гибкое колесо 11. Выравнивание волн деформации осуществляется биметаллической пластинкой 13, ток на которую подается от регулируемого источника 31 питания, при поступлении на его вход разности сигналов не равной нулю из блока 28 сравнения через интегратор 29 и ключ 30. Биметаллическая пластинка 13 посредством втулок 4 и 7 и гибкого подшипника дополнительно деформирует гибкое колесо 11, вьфавнивая волны деформации.
Втулки 3 и 4 (фиг. 2,3) контактируют с втулками 6 и 7 клиновыми поверхностями, которые выполнены коническими, за счет чего втулки 6 и 7 могут перемещаться в окружном направлении по втулкам 3 и 4. Поверх втулок 6 и 7, которыми они касаются кольца 8 гибкого подшипника, такие же, как и поверхность вала-кулачка 1. Фиксация втулок 6 и 7 в направлении осуществляется восемью биметаллическими пластинками, из которых 44-47 (фиг. 3) располагаются на левом торце гене70357 ;
ратора, а 48-51 (фиг. 2) - на правом. Один конец биметаллических пластинок 44-47 и 48-51 (фиг. 2 и 3) надевается на штифт 52, который крепится к втулкам 6 или 7, второй конец которых надевается на штифт 52, который крепится к валу-кулачку 1 . Питание биметаллических плас Q тинок 44, 46 и 48, 50 осуществляется от регулируемого источника 53 питания, а биметаллических пласт|1- нок 45,47 и 49,51 - от регулярного источника 54 питания. До начала ра.г- боты биметаллические пластинки запиI 3
тываются одинаковым током от регулируемых источников 53 и 54 питания, величина которого подбирается экспериментально так, чтобы обеспечить достаточную жесткость биметаллических пластинок 44-47 и 48-31 для предотвращения смещения втулок 6 и 7 в окружном направлении. Чтобы переместить втулки 6 и 7 в окружном 25 направлении, т.е. сместить большую ось генератора относительно направления приложения внешней нагрузки от волнового зацепления, например, для компенсации зазоров в зубчатом волновом зацеплении, вызванных износом, изменяют ток питания на одном из регулируемых источников 53 и 54 питания, что вызывает изменение жесткости диаметрально противоположных биметаллических пластинок.
20
35
а следовательно, смещение втулок 6 и 7 в окружном направлении.
40
45
50
Формула изобретения Волновая передача с регулируемым генератором, содержащая вал-кулачок с продольными пазами, установленные в них втулки, заклинивающиеся на наружных поверхностях последних, дополнительные втулки, гибкий подшипник, гибкое колесо и систему управления деформированием гибкого колеса, отличающаяся тем, что, с целью повышения кинематической точности путем устранения как радиальных зазоров, так и осевых перекосов в системе гибкое колесо - генератор, передача снабжена датчиками перемещения тел ка- чения гибкого подшипника и датчиками деформации гибкого колеса, уста новленными по обе стороны его зубчатого венца, заклинивающиеся по91370357 О
нерхности основных и дополнительных гибкого колеса вьтолнена в виде уп- втулок выполнены коническими, а ругих биметаллических пластинок система управления деформирования , для взаимного перемещения втулок.
51
А /
.г
фиг.З
S-6
| Волновая зубчатая передача | 1980 |
|
SU973972A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| Патент США V 2983162, кл | |||
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
