(Л
со
СО 4
f Фи21
повороты площадки, причем если двигатели вращаются в одном направлении, то вьтолняется поворот площадки вокруг оси X, а если в противоположные стороны, - то вокруг оси Y. Микровинты 15 и 16 обеспечивают перемещение опор 3 и 4 вдоль оси Z, а третья опора 7 - постоянство удаления точки О от вспомогательной плоскости 8, расположенной перпендикулярно прямой ОА. Соответствующим подбором скоростей электродвигателей можно обеспечить поворот площадки вокруг любой оси, лежащей в плоскости ХОУ и проходящей через точку О Вариант исполнения стола позволяет использовать в качестве всех кинематических пар пружинные подвески о При этом приводы перемещений скреплены с накладками плоских пружин, а эти накладки выполнены трапециевидными так, что продолжения линий их краев пересекаются на оси поворота. 4 з.п. ф-лы, 3 ил.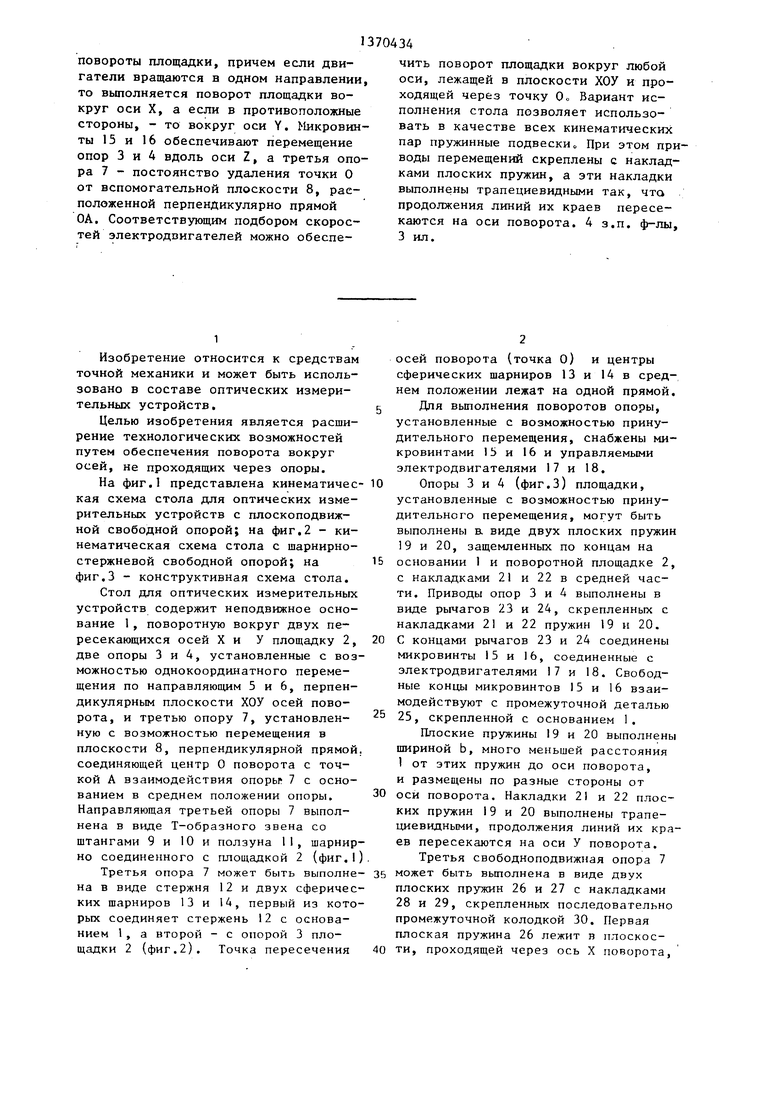
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки отражающего элемента оптического измерителя | 1982 |
|
SU1392327A1 |
| Стол для оптических измерительных устройств | 1982 |
|
SU1442818A1 |
| КООРДИНАТНЫЙ СТОЛ | 2003 |
|
RU2255321C1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| ПУЛЬТ УПРАВЛЕНИЯ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИЧЕСКОЙ СИСТЕМЫ | 2018 |
|
RU2760619C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ИЗМЕРЕНИЙ ГОРИЗОНТАЛЬНЫХ И ВЕРТИКАЛЬНЫХ УГЛОВ ГЕОДЕЗИЧЕСКИХ УГЛОМЕРНЫХ ПРИБОРОВ | 2011 |
|
RU2463561C1 |
| Тормоз | 1986 |
|
SU1350106A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ЭЛЕМЕНТОВ МЕХАНИЧЕСКОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2531031C2 |
| ВЫСОКОСКОРОСТНОЙ МЕТАЛЛОРЕЖУЩИЙ ПЯТИКООРДИНАТНЫЙ ЦЕНТР С ТРИПОД-МОДУЛЕМ | 2005 |
|
RU2285602C1 |
| АВТОМАТИЗИРОВАННАЯ УСТАНОВКА ДЛЯ КАЛИБРОВКИ ИНКЛИНОМЕТРОВ | 2002 |
|
RU2249689C2 |
Изобретение относится к средствам точной механики и может быть использовано в составе оптических измерительных устройств. Целью изобретения является расширение технологических возможностей за счет поворота вокруг осей, не проходяощх через опоры. На поворотную площадку 2 устанавливают оптический элемент (зеркало либо уголковый отражатель) так, чтобы его характерная точка бьша совмещена с точкой О пересечеиня осей поворота. Одновременным вращением электродвигателей 17 и 18 вызывают с 
1
Изобретение относится к средствам точной механики и может быть использовано в составе оптических измерительных устройств.
Целью изобретения является расширение технологических возможностей путем обеспечения поворота вокруг осей, не проходящих через опоры.
На фиг.1 представлена кинематичес- кая схема стола для оптических измерительных устройств с плоскоподвижной свободной опорой; на фиг,2 - кинематическая схема стола с шарнирно- стержневой свободной опорой; на фиг.З - конструктивная схема стола.
Стол для оптических измерительных устройств содержит неподвижное основание 1 , поворотную вокруг двух пересекающихся осей X и У площадку 2, две опоры 3 и 4, установленные с возможностью однокоординатного перемещения по направляющим 5 и 6, перпендикулярным плоскости ХОУ осей поворота, и третью опору 7, установленную с возможностью перемещения в плоскости 8, перпендикулярной прямой соединяющей центр О поворота с точкой А взаимодействия опорьр 7 с основанием в среднем положении опоры. Направляющая третьей опоры 7 выполнена в виде Т-образного звена со штангами 9 и 10 и ползуна 11, шарнир но соединенного с площадкой 2 {фиг.|
Третья опора 7 может быть выполне на в виде стержня 12 и двух сферических шарниров 13 и 14, первый из которых соединяет стержень 12 с основанием 1, а второй - с опорой 3 площадки 2 (фиг.2). Точка пересечения
5
0
35 0
5
0
осей поворота (точка О) и центры сферических шарниров 13 и 14 в среднем положении лежат на одной прямой.
Дпя выполнения поворотов опоры, установленные с возможностью принудительного перемещения, снабжены микровинтами 15 и 16 и управляемыми электродвигателями 17 и 18.
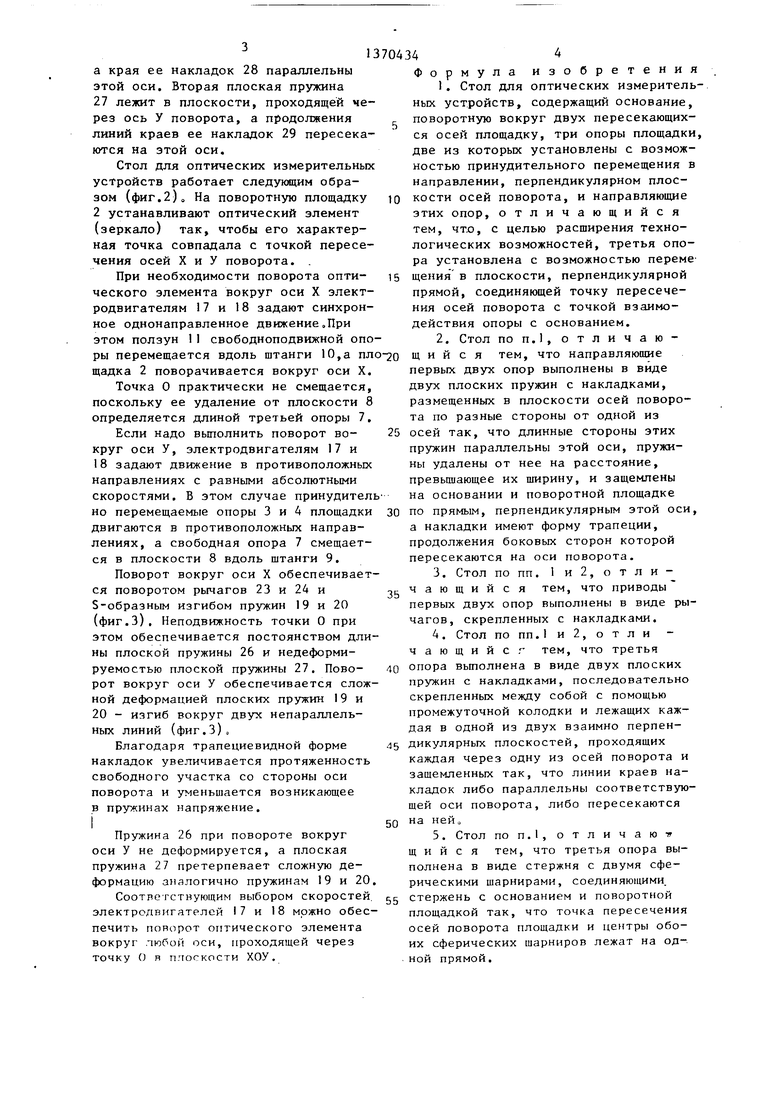
Опоры 3 и 4 (фиг.З) площадки, установленные с возможностью принудительного перемещения, могут быть выполнены а виде двух плоских пружин 19 и 20, защемленных по концам на основании 1 и поворотной площадке 2, с накладками 21 и 22 в средней части. Приводы опор 3 и 4 выполнены в виде рычагов 23 и 24, скрепленных с накладками 21 и 22 пружин 19 и 20. С концами рычагов 23 и 24 соединены микровинты 15 и 16, соединенные с электродвигателями 17 и 18. Свободные концы микровинтов 15 и 16 взаимодействуют с промежуточной деталью 25, скрепленной с основанием 1.
Плоские пружины 19 и 20 выполнены шириной Ь, много меньшей расстояния 1 от этих пружин до оси поворота, и размещены по разные стороны от оси поворота. Накладки 21 и 22 плоских пружин 19 и 20 выполнены трапециевидными, продолжения линий их краев пересекаются на оси У поворота.
Третья свободноподвижная опора 7 может быть выполнена в виде двух плоских пружин 26 и 27 с накладками 28 и 29, скрепленных последовательно промежуточной колодкой 30. Первая плоская пружина 26 лежит н плоскости, проходящей через ось X поворота,
а края ее накладок 28 параллельны этой оси. Вторая плоская пружина 27 лежит в плоскости, проходящей через ось У поворота, а продолжения линий краев ее накладок 29 пересекаются на этой оси.
Стол для оптических измерительных устройств работает следукицим образом (фиг.2)„ На поворотную площадку 2 устанавливают оптический элемент (зеркало) так, чтобы его характерная точка совпадала с точкой пересечения осей X и У поворота.
При необходимости поворота оптического элемента вокруг оси X электродвигателям 17 и 18 задают синхронное однонаправленное движение,При этом ползун 11 свободноподвижной опоры перемещается вдоль штанги 10,а пло-2о щ и и с я тем, что направляющие
щадка 2 поворачивается вокруг оси X.
Точка О практически не смещается, поскольку ее удаление от плоскости 8 определяется длиной третьей опоры 7.
Если надо выполнить поворот вокруг оси У, электродвигателям 17 и 18 задают движение в противоположных направлениях с равными абсолютными скоростями. В этом случае принудительно перемещаемые опоры 3 и 4 площадки двигаются в противоположных направлениях, а свободная опора 7 смещается в плоскости 8 вдоль штанги 9.
Поворот вокруг оси X обеспечивается поворотом рычагов 23 и 24 и S-образным изгибом пружин 19 и 20 (фиг.З). Неподвижность точки О при этом обеспечивается постоянством длины плоской пружины 26 и недеформируемостью плоской пружины 27. Поворот вокруг оси У обеспечивается сложной деформацией плоских пружин I9 и 20 - изгиб вокруг двух непараллельных линий (фиг.З),
Благодаря трапециевидной форме накладок увеличивается протяженность свободного участка со стороны оси поворота и уменьшается возникающее в пружинах напряжение.
i
Пружина 26 при повороте вокруг
оси У не деформируется, а плоская пружина 27 претерпевает сложную деформацию аналогично пружинам 19 и 20. Соответствующим выбором скоростей. электродвигателей 17 и 18 можно обеспечить поворот оптического элемента вокруг любой оси, проходящей через точку О в плоскости ХОУ.
25
30
зв
первых двух опор выполнены в виде двух плоских пружин с накладками, размещенных в плоскости осей пово та по разные стороны от одной из осей так, что длинные стороны эти пружин параллельны этой оси, пруж ны удалены от нее на расстояние, превьш1ающее их ширину, и защемлен на основании и поворотной площадк по прямым, перпендикулярным этой а накладки имеют форму трапеции, продолжения боковых сторон которо пересекаются на оси поворота.
45 дикулярных плоскостей, проходящих каждая через одну из осей поворота защемленных так, что линии краев н кладок либо параллельны соответств щей оси поворота, либо пересекаютс на нейо
щ и и с я тем, что третья опора в полнена в виде стержня с двумя сфе рическими шарнирами, соединяющими, стержень с основанием и поворотной площадкой так, что точка пересечен осей поворота площадки и центры об их сферических шарниров лежат на о ной прямой.
40
50
55
70434
Ф о
р м у л а
изобретения
поворотную вокруг двух пересекающихся осей площадку, три опоры площадки, две из которых установлены с возможностью принудительного перемещения в направлении, перпендикулярном плос10 кости осей поворота, и направляющие этих опор, отличающийся тем, что, с целью расширения технологических возможностей, третья опора установлена с возможностью переме15 щения в плоскости, перпендикулярной прямой, соединяющей точку пересечения осей поворота с точкой взаимодействия опоры с основанием.
0
в
первых двух опор выполнены в виде двух плоских пружин с накладками, размещенных в плоскости осей поворота по разные стороны от одной из осей так, что длинные стороны этих пружин параллельны этой оси, пружины удалены от нее на расстояние, превьш1ающее их ширину, и защемлены на основании и поворотной площадке по прямым, перпендикулярным этой оси, а накладки имеют форму трапеции, продолжения боковых сторон которой пересекаются на оси поворота.
щ и и с я тем, что третья опора выполнена в виде стержня с двумя сферическими шарнирами, соединяющими, стержень с основанием и поворотной площадкой так, что точка пересечения осей поворота площадки и центры обоих сферических шарниров лежат на одной прямой.
0
0
5
19
г;
25
Г6
S
Г5
| Тищенко ОоФ | |||
| Контрольно-измерительные приборы в машиностроении | |||
| М.: Машгиз, 1960, с.209 | |||
| Сборник материалов смотра-конкурса научно-технических конструкций, приборов и приспособлений | |||
| Вьт.К Лазерная техника, ч | |||
| Говорящий кинематограф | 1920 |
|
SU111A1 |
| М., 1976, с.44. | |||
