сс
о 
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНОЙ КОНСОЛЬНО-КОЗЛОВОЙ КРАН | 1966 |
|
SU181794A1 |
| Шариковая втулка Петухова П.З. для вращательного и возвратно-поступательного движений | 1989 |
|
SU1732043A1 |
| МОСТОВОЙ РОЛИКООПОРНЫЙ КРАН МАМЫРИНА ДЛЯ КОНТЕЙНЕРНЫХ ПЛОЩАДОК И СЕЛЬСКОХОЗЯЙСТВЕННЫХ АГРОПЛАНТАЦИЙ | 1992 |
|
RU2020122C1 |
| ПОДЪЕМНЫЙ КРАН, В ЧАСТНОСТИ МОСТОВОЙ ИЛИ КОЗЛОВЫЙ КРАН, СОДЕРЖАЩИЙ КРАНОВУЮ БАЛКУ, И СПОСОБ УСТАНОВКИ КРАНОВОЙ БАЛКИ НА ПОДЪЕМНОМ КРАНЕ | 2013 |
|
RU2596204C2 |
| ГРУЗОПОДЪЕМНАЯ ТЕЛЕЖКА С КАНАТНОЙ ТЯГОЙ | 2005 |
|
RU2288163C1 |
| ТРАНСПОРТНОЕ УСТРОЙСТВО | 2016 |
|
RU2702366C2 |
| Крановая установка | 1980 |
|
SU1025653A1 |
| Стенд для испытания ходовых колес крана | 1984 |
|
SU1219937A1 |
| БЯПЛЙОТЕКЯ I | 1970 |
|
SU271756A1 |
| Способ управления перекосом мостового или козлового крана | 2022 |
|
RU2783317C1 |
Изобретение относится к измерительной технике и может быть использовано в транспортном машиностроении, например, при испытаниях козловых и мостовых кранов. Целью изобретения является упрощение конструкции устройства. Перед испытаниями кран 3 устанавливается на крановом пути 6о Груз занимает положение, равное половине возможного вертикального смещения. При движении крана 3 трос 1 огибает блоки 5, постоянно находясь под натяжением со стороны груза. При синхронном движении обеих сторон крана 3 груз не меняет своего положения. .При забегании или отставании Ъдной иэ опор крана относительно другой во время движения груз опускается или поднимается, тем самым изменяя сигнал с выхода датчика перемещения, связанного с грузом, 2 ил. с (Л
фиг.;
1
Изобретение относится к измерительной технике и может быть использовано в транспортном машиностроении, например, при испытаниях козловых и мостовых кранов.
Целью изобретения является упрощение конструкции устройства.
На фиг„1 показана установка тросо13
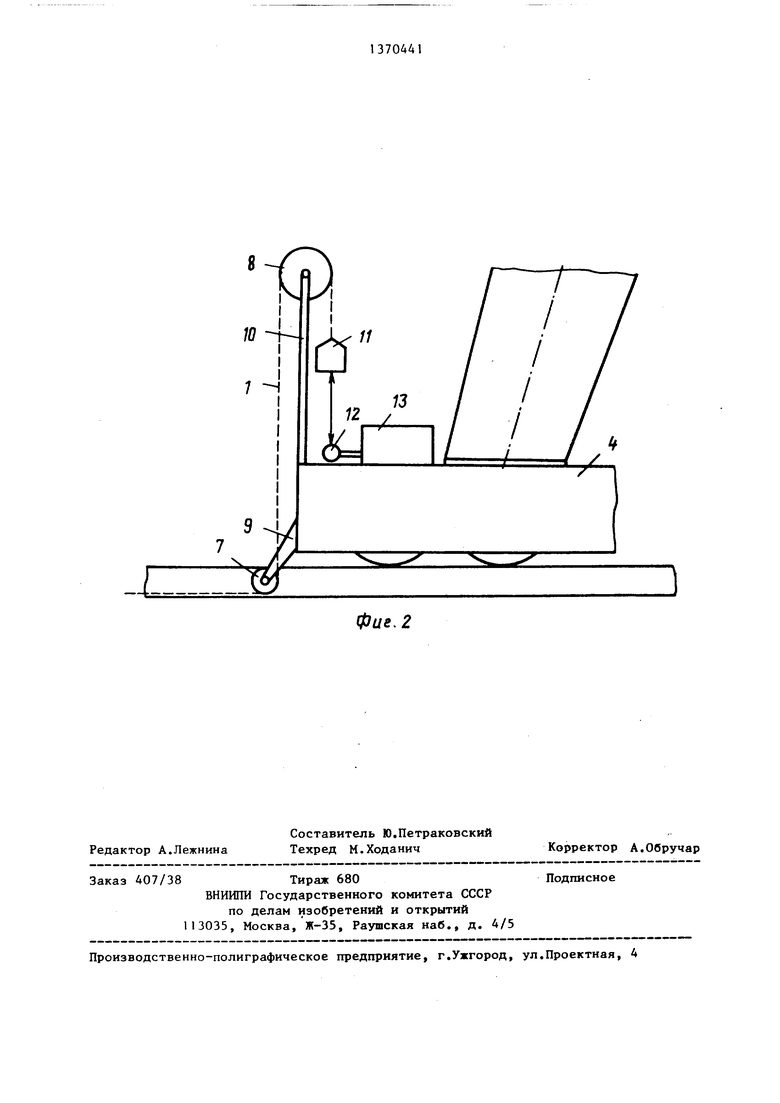
блочной системы; на фиг.2 - установка iо другой .грУз П соответственно подни
регистрирующих приборов.
Устройство для регистрации относительного забега опор кранов мостового типа содержит трос 1, один конец которого жестко закреплен на ходовой тележке 2 крана 3, а другой конец подведен к месту установки регистрирующих приборов на ходовой тележке 4 крана 3„ Трос 1 огибает жестко закреп ленные на земле блоки 5, расположен- ные около рельсовых тупиков крановогс пути 6, дополнительные блоки 7 и 8, жестко закрепленные на ходовой тележке 4 с помощью соответственно кронштейна 9 и стойки 10, и удерживает на весу груз П. Высота стойки 10 позволяет грузу 11 подниматься и опускаться на величину возможного относительного забега крановых опор Груз 11 соединен с регистрирующей и записывающей аппаратурой, представляющей из себя датчик 12 перемещения и осциллограф 13.
Устройство работает следующим образом.
Перед началом замеров кран 3 устанавливается строго перпендикулярно крановому пути 6. Груз 11 занимает положение, равное половине возможного вертикального смещения. В этом случае злектрический сигнал, снятьй с датчика 12 Перемещения, вычерчива
412
ет на ленте осциллографа 13 нулевую линию. При движении крана 3 трос 1 огибает блоки 5, постоянно находясь под натяжением со стороны груза 11, При синхронном движении обеих сторон крана 3 груз 11 не меняет своего положения. При забегании или отставании одной из опор крана 3 относительно
мается или опускается на точно такое же расстояние, копируя случайный процесс относительного забега опор. Электрический сигнал в датчике 12 перемещения при зтом изменяется пропорционально величине относительного забега опор и осциллографом 13 записывается на ленту.
Между блоками 5 трос 1 лежит непосредственно на земле, потому провисание троса 1 на точность измерений не влияет.
Формула изобретения
Устройство для регистрации относительного забега опор кранов мостового типа, содержащее датчик относительного перемещения, устанавливаемый на опорах, подключенный к нему регистрирующий прибор, отличающееся тем, что, с целью уп рощения конструкцииi датчик относительного перемещения выполнен в виде блоков, располагаемых вдоль подкранового пути, дополнительных блоков, устанавливаемых на одной из опор, троса с грузом на конце, трос одним концом огибает блоки, располагаемые вдоль подкранового пути, и дополнительные
блоки, а другой конец троса предназначен для закрепления на второй опоре крана.
Фие.2
| Способ комплексного контроля радиальных биений | 1979 |
|
SU1062508A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Абрамович И.И | |||
| Методика испытаний козловых кранов.- Труды/ВНИИПТМАШ, 196В, вьт | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
