Данное изобретение относится к транспортному устройству для транспортировки, по меньшей мере, одного контейнера или другого груза, причем транспортное устройство имеет, по меньшей мере, одну ходовую тележку и, по меньшей мере, одно грузозахватное устройство и, по меньшей мере, восемь подъемных канатов, и грузозахватное устройство имеет соединительные устройства для закрепления контейнера или другого груза и при помощи подъемных канатов подвешено на ходовой тележке с возможностью подъема и опускания, причем подъемные канаты могут наматываться на установленные на ходовой тележке с возможностью вращения канатные барабаны. Кроме того, изобретение относится также к способу транспортировки, по меньшей мере, одного контейнера или другого груза и к крану, включающему в себя, по меньшей мере, одно транспортное устройство.
При транспортировке контейнеров, по меньшей мере, одним краном используются транспортные устройства указанного выше типа. Наряду с подниманием и опусканием, то есть движением в вертикальном направлении, в большинстве случае также необходимо перемещение контейнеров или других грузов, по меньшей мере, в одном горизонтальном направлении, для того чтобы контейнеры или грузы опускать на землю в предопределенном месте, передавать на грузовые автомобили, штабелировать друг на друге и т.д. Ходовая тележка, называемая также крановой тележкой, перемещается при этом в большинстве случае вдоль пролетной балки крана и делает возможным движение транспортного устройства в одном первом горизонтальном направлении, в то время как кран целиком может перемещаться по подкрановым рельсам в большинстве случаев во втором горизонтальном направлении. Тем самым возможно также грубое позиционирование транспортного устройства или грузозахватного устройства относительно контейнера или другого груза.
Для быстрой перевалки контейнеров, наряду с высокими скоростями перемещения предпочтительной является способность к быстрому, а также очень точному позиционированию (= точное позиционирование) грузозахватного устройства в первую очередь также на месте приема контейнеров и на запланированном месте складирования контейнеров.
В DE 20 2006 000 490 U1 показано транспортное устройство указанного вначале типа, у которого грузозахватное устройство поддерживается соответственно двумя продольными парами канатов и соответственно двумя поперечными парами канатов. Две поперечные пары канатов приводятся в движение совместно одним двигателем. Также две продольные пары канатов приводятся в движение одним общим двигателем. Для точного позиционирования грузозахватного устройства предусмотрены в области точек крепления пар канатов на грузозахватном устройстве поршне-цилиндровые блоки, которые делают возможным перемещение грузозахватного устройства относительно точек крепления пар канатов. Для управления поршне-цилиндровыми блоками необходимы на грузозахватном устройстве соответствующие гидравлические агрегаты, электрические компоненты, датчики и т.д., которые повышают собственный вес грузозахватного устройства.
Задача изобретения состоит в предоставлении транспортного устройства указанного вначале типа, у которого собственный вес грузозахватного устройства может сокращаться по сравнению с уровнем техники.
Согласно изобретению это достигается при помощи транспортного устройства с признаками пункта 1 формулы изобретения.
Таким образом, у транспортного устройства согласно изобретению предусмотрено другими словами то, что каждый подъемный канат может наматываться и/или, по меньшей мере, частично намотан на собственном канатном барабане, и все канатные барабаны могут приводиться в движение независимо друг от друга с различными частотами вращения и/или в различных направлениях вращения.
Основная идея настоящего изобретения заключается в том, что каждый канатный барабан может приводиться в движение для наматывания и разматывания своего подъемного каната индивидуально с необходимой в данной момент частотой вращения и/или направлением вращения, для того чтобы оказывать влияние на суммарное движение грузозахватного устройства или контейнера. Частота вращения могла бы также обозначаться как скорость вращения. При помощи соответствующего изобретению транспортного устройства возможно производить точное позиционирование подвешенного на ходовой тележке грузозахватного устройства (оно обозначается также как головной блок) посредством индивидуального наматывания и разматывания каждого отдельного подъемного каната. Суммарное движение грузозахватного устройства складывается в этом случае благодаря согласованным действиям управляемых соответственно индивидуально канатных барабанов или подъемных канатов. От дополнительных приводных блоков, например, от известных из уровня техники поршне-цилиндровых блоков для точного позиционирования грузозахватного устройства, а также от их энергоснабжения и средств управления можно отказаться. Вследствие этого получается значительно сокращенный собственный вес грузозахватного устройства.
Для реализации исключительного движения поднимания и опускания грузозахватного устройства в вертикальном направлении предпочтительно предусмотрено то, что канатные барабаны могут приводиться в движение синхронно, то есть что канатные барабаны могут приводиться в этом случае в движение в один момент времени с соответствующей, при необходимости одинаковой, частотой вращения или в одинаковом направлении вращения. Это может достигаться посредством соответствующего индивидуального управления канатными барабанами при помощи согласованных друг с другом соответствующим образом заданных значений.
Канатный барабан в рамках изобретения мог бы также обозначаться как канатная лебедка и служит для наматывания и разматывания подъемного каната. Посредством вращения канатного барабана подъемный канат или концевой участок подъемного каната наматывается или разматывается. Количество канатных барабанов соответствует, таким образом, количеству подъемных канатов.
В качестве подъемного каната обозначается в этом тексте канат, который способствует поднятию контейнера или другого груза и без разрывов распространяется между намотанным на соответствующем канатном барабане концом и обращенным от канатного барабана концом подъемного каната, закрепленным анкерным креплением на конструктивном элементе. Под понятием канат или подъемный канат наряду с самим канатом следует также понимать ленты или цепи. Совокупность подъемных канатов образует так называемую канатную шахту (называемую также канатной башней), которая распространяется между ходовой тележкой и грузозахватным устройством. Канатная шахта является той несущей конструкцией, которая переносит грузозахватное устройство и закрепленный при необходимости на нем контейнер или другой груз. Геометрия канатной шахты зависит от положения грузозахватного устройства по отношению к ходовой тележке.
При выходе из строя одного из, по меньшей мере, восьми подъемных канатов, например, вследствие разрыва подъемного каната, транспортное устройство может все еще надежно эксплуатироваться с оставшимися подъемными канатами, без того чтобы существенно уменьшалась устойчивость канатной шахты и надежность транспортного устройства.
Предпочтительно предусмотрено то, что грузозахватное устройство имеет две противоположные друг другу продольные стороны и две ориентированные по нормали к продольным сторонам, противоположные друг другу торцевые стороны, причем с каждой из торцевых сторон и продольных сторон входят в зацепление, по меньшей мере, два из подъемных канатов, и соответственно входящие в зацепление с одной торцевой стороной подъемные канаты образуют, если смотреть в направлении параллельно к продольным сторонам, по меньшей мере, одну точку пересечения, и/или что соответственно входящие в зацепление с одной продольной стороной подъемные канаты образуют, если смотреть в направлении параллельно к торцевым сторонам, по меньшей мере, одну точку пересечения.
Благодаря перекрещивающемуся расположению соответственно двух подъемных канатов, входящих в зацепление с одной продольной или торцевой стороной грузозахватного устройства, может повышаться устойчивость канатной шахты или транспортного устройства. Несмотря на то, что подъемный канат может воспринимать по существу только усилия в направлении своего распространения, при помощи указанного перекрещивающегося расположения соответственно двух подъемных канатов могут сокращаться маятниковые движения грузозахватного устройства из-за динамических процессов (процессов ускорения, ветра и т.д.).
Предпочтительно предусмотрено то, что, по меньшей мере, один из подъемных канатов, предпочтительно каждый подъемный канат, развернут на грузозахватном устройстве при помощи отклоняющего ролика, и обращенный от канатного барабана конец подъемного каната закреплен анкерным креплением на ходовой тележке. Благодаря развороту подъемного каната уменьшены действующие силы натяжения в подъемном канате, так как реализован своего рода полиспаст. Разворот каната на отклоняющем ролике мог бы также обозначаться как проведение подъемного каната через блок или сдвоенное прохождение подъемного каната. Благодаря уменьшенным силам натяжения каната возможно выбирать меньший диаметр каната. Кроме того, предпочтительно может также реализовываться меньший диаметр канатного барабана. Благодаря меньшим силам натяжения каната являются также меньшими необходимые крутящие моменты для приведения в движение соответствующего канатного барабана. Обращенный от канатного барабана конец подъемного каната крепится анкерным креплением или фиксируется на ходовой тележке предпочтительно при помощи концевой заделки каната. Подобные концевые заделки канатов достаточно известны.
Наиболее предпочтительно предусмотрено то, что транспортное устройство имеет, предпочтительно для каждого подъемного каната, по меньшей мере, одно измерительное устройство для определения силы натяжения каната, действующей в одном из подъемных канатов, предпочтительно в соответствующем подъемном канате. В качестве силы натяжения каната обозначается та сила, с которой растягивается подъемный канат, то есть та сила, с которой канат натянут, и которая действует в продольном направлении каната. Сила натяжения каната непостоянна и зависит от статических краевых условий (собственного веса грузозахватного устройства, собственного веса каната, собственного веса контейнера или другого груза) и от динамических краевых условий, как например мгновенного ускорения грузозахватного устройства, действующих ветровых усилий и т.д.
Срок службы подъемного каната в значительной степени зависит от возникающих сил натяжения каната. Посредством измерения силы натяжения каната измерительным устройством может определяться мгновенная нагрузка соответствующего подъемного каната. В предпочтительных вариантах осуществления данные о действующей в соответствующем подъемном канате силе натяжения каната могут использоваться для управления и/или регулировки суммарного движения транспортного устройства или грузозахватного устройства. Являющаяся угрозой перегрузка подъемного каната может непосредственно фиксироваться, например, если контейнер или грузозахватное устройство сталкивается с другими препятствиями, и предотвращаться посредством соответствующего управления канатными барабанами.
Предпочтительно предусмотрено то, что каждый канатный барабан приводится в движение по отдельности собственным двигателем, предпочтительно электродвигателем. При помощи "общей электрической волны" отдельные канатные барабаны могут приводиться в движение синхронно, как это, например, необходимо при поднятии грузозахватного устройства в направлении подъема (= вертикальном направлении). Двигатели предпочтительно имеют для этого датчики, как например инкрементальные датчики или вращающиеся трансформаторы (резольверы), которые регистрируют угловое положение соответствующего вала двигателя. Посредством соответствующего управления и соответственно регулирования может реализовываться равноугольное вращение валов всех двигателей. Отдельные двигатели могут также приводиться в действие независимо друг от друга, как это может наиболее предпочтительно реализовываться с электродвигателями.
В альтернативном варианте осуществления изобретения также допустимо и возможно, что, по меньшей мере, два канатных барабана приводятся в движение одним общим двигателем, причем предусмотрен управляемый или регулируемый соответствующим образом редуктор для индивидуального установления частоты и направления вращения каждого отдельного канатного барабана.
Предпочтительно предусмотрено, что измерительное устройство для измерения силы натяжения каната расположено на моментном упоре редуктора, причем редуктор действует между канатным барабаном и двигателем. Приводной крутящий момент или вращательные движения создаются двигателем и передаются редуктором на соответствующий канатный барабан. Моментный упор служит для опирания корпуса редуктора на ходовую тележку крана и предотвращает проворачивание корпуса редуктора при эксплуатации. Для этого моментный упор имеет, как правило, рычаг, который, например, при помощи пальца соединен с ходовой тележкой. Посредством измерения введенных в несущую конструкцию ходовой тележки опорных усилий моментного упора могут определяться действующие крутящие моменты в силовой передаче и соответственно действующие в соответствующем подъемном канате силы натяжения каната. Расположенное на моментном упоре измерительное устройство могло бы иметь, например, штыревой датчик силы или весовую ячейку с тензодатчиком. Также использование других, известных по существу в уровне техники устройств измерения усилия или крутящего момента допустимо и возможно.
В альтернативном варианте осуществления измерительного устройства может быть предусмотрено то, что измерительное устройство для регистрации силы натяжения каната расположено на обращенном от канатного барабана конце подъемного каната.
Данное изобретение предусматривает также кран, предпочтительно козловой кран, включающий в себя, по меньшей мере, одно транспортное устройство согласно изобретению. Ходовая тележка транспортного устройства может предпочтительно прокатываться рабочими колесами по опорным рельсам пролетной балки (= крановой балки) крана.
Далее изобретение предусматривает способ транспортировки, по меньшей мере, одного контейнера или другого груза при помощи соответствующего изобретению транспортного устройства, причем поступательное и/или вращательное движение, по меньшей мере, одного подвешенного на грузозахватном устройстве контейнера или другого груза, предпочтительно в шести степенях свободы, осуществляется исключительно посредством соответствующего наматывания и разматывания подъемных канатов транспортного устройства на соответствующем канатном барабане, и канатные барабаны приводятся для этого в движение соответствующим образом.
Таким образом, наряду с поступательными движениями предпочтительно также возможно совершать вращательные движения в первую очередь вокруг воображаемой вертикальной оси вращения, однако также вокруг воображаемой горизонтальной оси вращения для точного позиционирования грузозахватного устройства и соответственно контейнера или другого груза. Эти вращательные движения обозначаются на техническом языке также как перекосы, балансировочные движения и наклоны. Посредством соответствующего координирования направления вращения и/или частоты вращения отдельных канатных барабанов могут достигаться предпочтительно все шесть степеней свободы контейнера исключительно посредством индивидуального приведения в движение канатных барабанов. Шесть степеней свободы относятся к движениям в трех независимых друг от друга направлениях (= поступательные движения) и к вращениям в трех независимых друг от друга плоскостях (= вращательные движения).
В дальнейшем соответствующем изобретению способе транспортировки контейнера или другого груза при помощи транспортного устройства согласно изобретению предусмотрено то, что силы натяжения, по меньшей мере, одного подъемного каната, предпочтительно каждого подъемного каната, измеряются для предотвращения перегрузки, и канатные барабаны приводятся соответствующим образом в движение по отдельности независимо друг от друга или индивидуально. В частности, может быть предусмотрено приводить отдельные канатные барабаны в движение по необходимости с различными или же одинаковыми угловыми ускорениями и/или частотами вращения и/или крутящими моментами.
Силы натяжения каната предпочтительно определяются в измерительном положении, в котором контейнер или другой груз свободно висит. Затем, исходя из определенных сил натяжения каната, может выбираться заданное значение для максимально допустимого углового ускорения и/или заданное значение для максимально допустимой частоты вращения соответствующего канатного барабана. Предпочтительно может быть предусмотрено то, что также другие приводы крана для грубого позиционирования контейнера или другого груза могут ограничиваться в отношении максимальной скорости перемещения и/или максимального ускорения в зависимости от фактически измеренных сил натяжения каната.
Дополнительно или альтернативно в дальнейшем способе может быть предусмотрено то, что контролируется мгновенная сила натяжения подъемного каната во время всего движения контейнера или другого груза, и канатные барабаны управляются в зависимости от мгновенной силы натяжения каната. Тем самым, например, возможно регистрировать возникающие неожиданно динамические силы и уменьшать или выравнивать их посредством соответствующей реакции, для того чтобы таким образом предотвращать перегрузку в подъемном канате или подъемных канатах.
В дальнейшем соответствующем изобретению способе допустимо и возможно выбирать положение или ориентацию контейнера в отношении ходовой тележки таким образом, что абсолютные значения сил натяжения соответствующих подъемных канатов могут уравниваться друг с другом. В частности, при неравномерно тяжелых контейнерах (центр тяжести которых расположен эксцентрично) вследствие этого возможно распределять нагрузку еще лучше по различным подъемным канатам, выбирать соответствующим образом скорость перемещения крана и увеличивать срок службы подъемных канатов.
Различные, указанные выше способы могут естественно также комбинироваться друг с другом.
Дальнейшие признаки и подробности предпочтительных вариантов осуществления изобретения разъясняются при помощи изображенного на чертеже примера осуществления соответствующего изобретению транспортного устройства и соответствующего изобретению крана. На чертеже показаны:
фиг. 1 - вид в перспективе соответствующего изобретению транспортного устройства;
фиг. 2 - транспортное устройство согласно фиг. 1 на виде на продольную сторону контейнера;
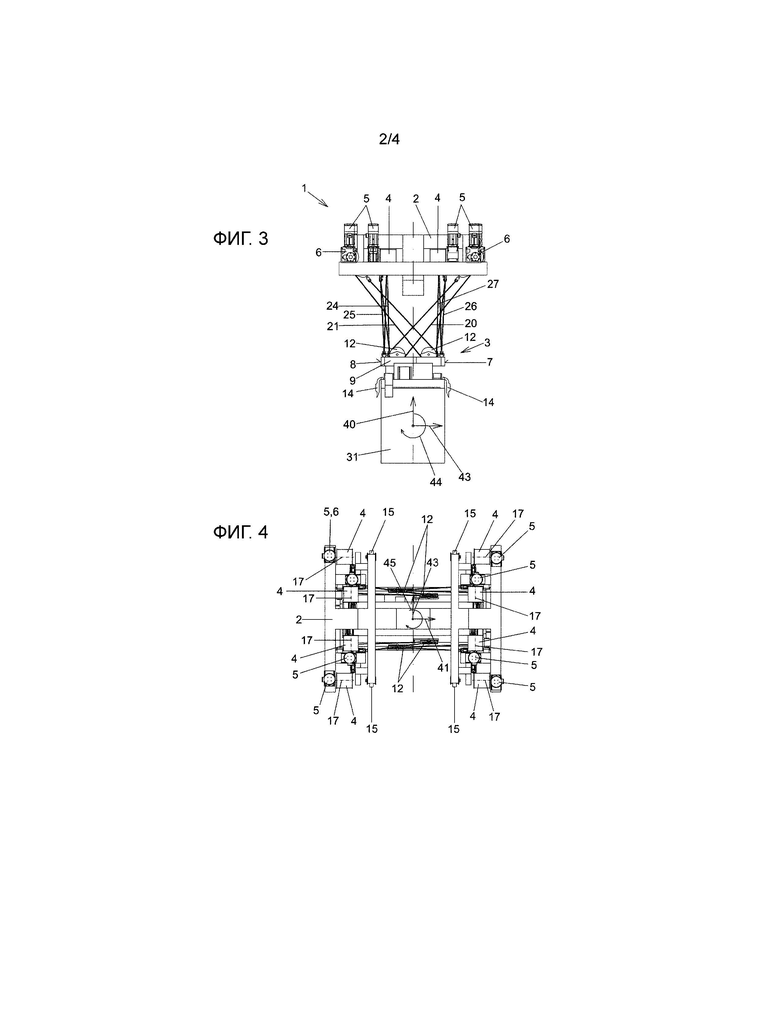
фиг. 3 - транспортное устройство согласно фиг. 1 на виде на торцевую сторону контейнера;
фиг. 4 - транспортное устройство согласно фиг. 1 на виде сверху;
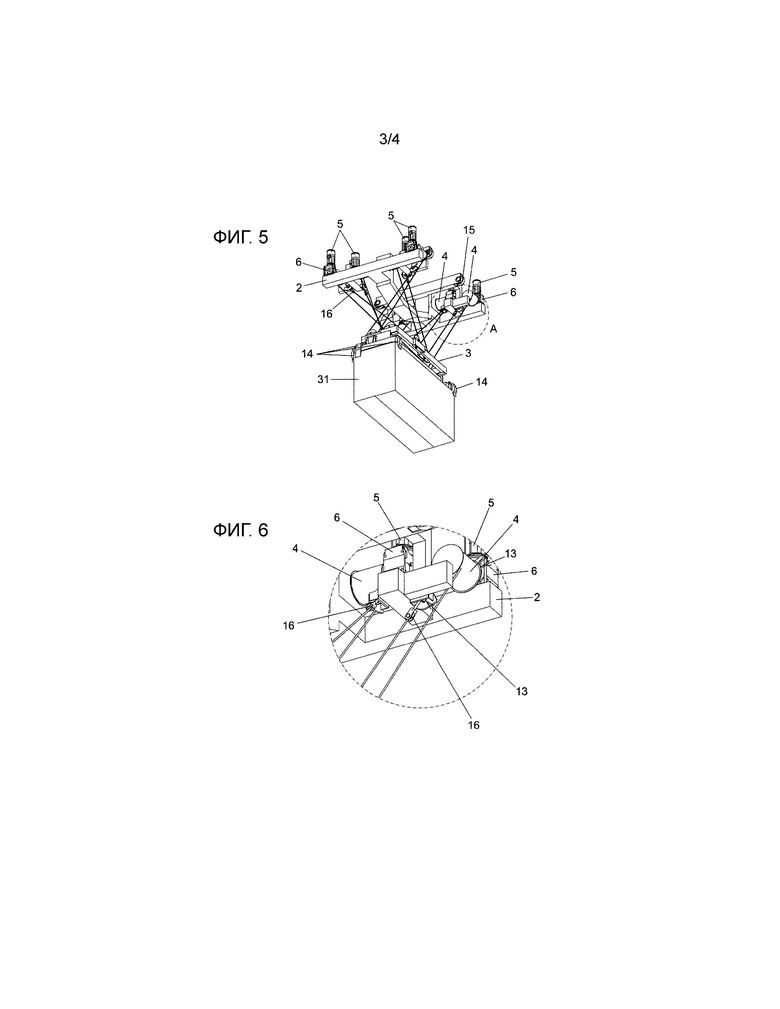
фиг. 5 - вид в перспективе снизу транспортного устройства согласно фиг. 1;
фиг. 6 - фрагмент A согласно фиг. 5;
фиг. 7 - козловой кран с соответствующим изобретению транспортным устройством с поднятым грузозахватным устройством; и
фиг. 8 - козловой кран согласно фиг. 7 с опущенным грузозахватным устройством.
Для лучшего обзора не все конструктивные элементы на всех фигурах снабжены ссылочными позициями.
Транспортное устройство 1 имеет ходовую тележку 2 и грузозахватное устройство 3. Грузозахватное устройство 3 служит для закрепления контейнера 31 и имеет для этого множество известных по существу соединительных устройств 14. Эти соединительные устройства 14 называются также "ластами". Грузозахватное устройство 3 подвешено при помощи восьми подъемных канатов 20-27 на ходовой тележке 2 и может перемещаться относительно ходовой тележки 2 посредством удлинения или укорочения свободной длины соответствующего подъемного каната 20-27.
Подъемные канаты 20-27 могут по отдельности наматываться или намотаны на установленных на ходовой тележке 2 с возможностью вращения канатных барабанах 4. Количество канатных барабанов 4 соответствует, таким образом, количеству подъемных канатов 20-27. Все канатные барабаны 4 могут индивидуально или независимо друг от друга приводиться в движение с различными или одинаковыми частотами вращения и/или в различных или одинаковых направлениях вращения. В примере осуществления каждый из канатных барабанов 4 приводится в движение собственным двигателем 5. Предпочтительно предусмотрено, что, по меньшей мере, два из канатных барабанов 4 имеют ориентированные параллельно друг к другу оси 17 вращения. В примере осуществления оси 17 вращения соответственно четырех из канатных барабанов 4 ориентированы параллельно друг к другу.
Двигатели 5 выполнены в примере осуществления в виде электродвигателей и соответственно объединены с редуктором 6. Подобные комбинации обозначаются также как мотор-редуктора. Двигатели 5 могут управляться независимо друг от друга, то есть различные двигатели 5 в один момент времени могут иметь различные или одинаковые частоты вращения и/или различные или одинаковые направления вращения. Также возможно нагружать канатные барабаны 4 различными, созданными соответствующим двигателем 5, крутящими моментами.
Каждый из подъемных канатов 20-27 развернут в примере осуществления на грузозахватном устройстве 3 при помощи отклоняющего ролика 12. Обращенный от канатного барабана 4 конец каждого подъемного каната 20-27 закреплен анкерным креплением при помощи концевой заделки 16 каната на ходовой тележке 2. Развернутые на отклоняющем ролике 12 участки одного подъемного каната 20-27 проходят между отклоняющим роликом 12 и ходовой тележкой 2 по существу в одинаковом направлении. Под понятием "по существу" подразумевается в этом контексте угловое отклонение развернутых участков каната максимум в 30°, предпочтительно менее чем в 20°.
Благодаря двойному проведению каждого подъемного каната 20-27 (= проведению каната через блок) действующие в соответствующем подъемном канате 20-27 силы натяжения каната уменьшены вдвое по сравнению с одинарным проведением, из-за чего может выбираться меньший диаметр подъемных канатов 20-27. Также являются меньшими необходимые для вращения канатного барабана 4 крутящие моменты, вследствие чего могут использоваться меньшие двигатели 5 и соответственно редукторы 6. Вследствие этого также возможно выбирать канатные барабаны 4 с меньшим диаметром.
Грузозахватное устройство 3 имеет на виде сверху по существу прямоугольный контур, то есть оно имеет две противоположные друг другу продольные стороны 7, 8 и две, ориентированные по нормали к продольным сторонам 7, 8, противоположные друг другу торцевые стороны 9, 10. Продольные стороны 7, 8 и торцевые стороны 9, 10 ориентированы предпочтительно параллельно к продольным сторонам 34 и торцевым сторонам 35 закрепленного в грузозахватном устройстве 3 контейнера 31. В примере осуществления соответственно два отклоняющих ролика 12 расположены на продольных сторонах 7, 8 и торцевых сторонах 9, 10 и установлены с возможность вращения относительно грузозахватного устройства 3. Соответственно два из подъемных канатов 20-27 входят в зацепление при помощи соответствующих отклоняющих роликов 12 с каждой из торцевых сторон 9, 10 и продольных сторон 7, 8.
В примере осуществления входящие в зацепление с одной торцевой стороной 9, 10 подъемные канаты 20, 21 и соответственно 22, 23 образуют, если смотреть в направлении параллельно к продольным сторонам 7, 8 четыре точки 11 пересечения (см. фиг. 3). Также входящие в зацепление с одной продольной стороной 7, 8 подъемные канаты 24, 25 и соответственно 26, 27 образуют, если смотреть в направлении параллельно к торцевым сторонам 9, 10 четыре точки 11 пересечения. Посредством перекрещивания подъемных канатов 20-27, входящих в зацепление соответственно с одной продольной стороной 7, 8 или торцевой стороной 9, 10, может достигаться высокая устойчивость образованной из подъемных канатов 20-27 канатной шахты транспортного устройства 1. Так как канаты могут передавать в основном усилия в своем продольном направлении, это перекрещивающееся расположение подъемных канатов 20-27 оптимально. Кроме того, возможно проходить при помощи транспортного устройства 1 относительно узкие пролеты между контейнерами (см. фиг. 8). Если отказываются от отклоняющих роликов 12, и каждый подъемный канат 20-27 проводится только один раз, то вместо четырех получается соответственно лишь одна точка пересечения при двух перекрещивающихся подъемных канатах.
Для поднятия и опускания контейнера 31 или грузозахватного устройства 3 в вертикальном направлении канатные барабаны 4 приводятся в движение двигателями 5 синхронно, несмотря на при необходимости возможную согласно изобретению точную юстировку. Тем самым предотвращается опрокидывание контейнера 31 или грузозахватного устройства 3 во время движения поднятия и опускания. Частота вращения соответствующего двигателя 5 регистрируется соответствующими датчиками и выравнивается с другими двигателями 5. Этот синхронный режим работы нескольких независимых двигателей 5 обозначается также как «общая электрическая волна».
Наряду с синхронным режимом работы канатных барабанов 4 согласно изобретению также возможно независимое друг от друга приведение в движение канатных барабанов 4, так что помимо или во время движения поднятия и опускания также создаются условия для точного позиционирования грузозахватного устройства 3 в дополнительных степенях свободы.
На фиг. 2 отмечены возможные направления движения грузозахватного устройства 3 по отношению к виду на продольную сторону 34 контейнера 31. Для движения грузозахватного устройства 3 или контейнера 31 в первом направлении 40 (= направлении поднятия) все канатные барабаны 4 приводятся в действие, как уже было разъяснено, по меньшей мере, по существу синхронно, и соответствующие подъемные канаты 20-27 по существу синхронно наматываются на соответствующие канатные барабаны 4.
Для движения во втором направлении 41 канатные барабаны 4 приводятся в движение индивидуально. В то время как продольный участок соответствующего подъемного каната 24, 26 разматывается с соответствующих канатных барабанов 4, и продольный участок соответствующего подъемного каната 25, 27 наматывается на соответствующий канатный барабан 4, грузозахватное устройство 3 или контейнер 31 перемещается во втором направлении 41. Подъемные канаты 20-23 соответствующим образом пропорционально наматываются или разматываются, для того чтобы предотвращать перегрузку или провисание отдельных подъемных канатов.
Наряду с чисто поступательными движениями в первом направлении 40 и во втором направлении 41 допустима и возможна любая комбинация этих направлений. Само собой разумеется, грузозахватное устройство 3 может также перемещаться в соответствующем противоположном направлении к первому направлению 40 и ко второму направлению 41. В этом случае направления вращения канатных барабанов 4 соответственно обращаются.
Дополнительно в примере осуществления предусмотрено, что грузозахватное устройство 3 или контейнер 31 может поворачиваться в направлении 42 поворота (= вращательное движение). Посредством соответствующей координации движения канатных барабанов 4 это движение в направлении 42 поворота может достигаться. Подъемные канаты 20, 21 частично разматываются с соответствующего канатного барабана 4, в то время как подъемные канаты 22, 23 частично наматываются на соответствующий канатный барабан 4. Подъемные канаты 24, 26 и 25, 27 соответствующим образом наматываются или разматываются, для того чтобы выполнять поворотное движение без ослабления или перегрузки соответствующих подъемных канатов. Поворотное движение в противоположном направлении к направлению 42 поворота равным образом возможно. Также поворотное движение в или против направления 42 поворота может произвольным образом накладываться на поступательное движение в первом направлении 40 и во втором направлении 41.
Аналогично, как это было разъяснено при помощи фиг. 2 для вида на продольную сторону 34 контейнера 31, может также реализовываться возможность движения грузозахватного устройства 3 по отношению к виду на торцевую сторону 35 контейнера 31 или к виду на торцевую сторону 9 грузозахватного устройства 3 (см. фиг. 3). Здесь также возможны поступательные движения в или против первого направления 40 и/или против третьего направления 43 и поворотное движение в или против направления 44 поворота (= вращательное движение) вокруг оси контейнера 31 или грузозахватного устройства 3 посредством целенаправленного приведения в движение соответствующих канатных барабанов 4 подъемных канатов 20-27.
Также поворот грузозахватного устройства 3 вокруг вертикальной оси транспортного устройства 1, в или против направления 45 поворота, может реализовываться соответствующим образом (см. фиг. 4).
Таким образом, предпочтительно грузозахватное устройство 3 или контейнер 31 может произвольно перемещаться в шести степенях свободы, как это также предусмотрено в примере осуществления. Так как точное позиционирование грузозахватного устройства 3 может производиться при помощи подъемных канатов 20-27, можно отказаться от промежуточной рамы и от известных в уровне техники дополнительных приводов для точного позиционирования. Тем самым в итоге предпочтительно возможно экономить вплоть до одной трети массы грузозахватного устройства 3 по сравнению с известным из уровня техники грузозахватным устройством.
В примере осуществления действующая в соответствующем подъемном канате 20-27 сила натяжения каната измеряется соответствующим измерительным устройством 13. Измерительное устройство 13 соответственно расположено на моментном упоре редуктора 6 мотор-редуктора. Редуктор 6 действует между соответствующим канатным барабаном 4 и соответствующим двигателем 5. На фиг. 6 моментный упор редуктора 6 закрыт канатным барабаном 4. Моментный упор служит для опирания корпуса редуктора 6 или мотор-редуктора на ходовую тележку 2. Возникающие разности крутящих моментов входной и выходной стороны редуктора 6 вводятся моментным упором в несущую конструкцию ходовой тележки 2, и таким образом предотвращается проворачивание редуктора 6 во время эксплуатации. Благодаря расположению штыревого датчика силы измерительного устройства 13 на моментном упоре, между моментным упором и ходовой тележкой 2, могут определяться мгновенные усилия или крутящие моменты, и тем самым могут делаться выводы о действующих напрямую силах натяжения в подъемных канатах 20-27. Подобные измерительные устройства 13 достаточно известны. В других вариантах осуществления измерительное устройство 13 могло бы также иметь расположенную на моментном упоре весовую ячейку с тензодатчиком или месдозу, которая позволяет делать выводы о разностях крутящих моментов или о действующих силах натяжения каната.
Альтернативно или дополнительно также возможно то, что соответствующее измерительное устройство 13 для регистрации силы натяжения каната расположено на обращенном от канатного барабана 4 конце соответствующего подъемного каната 20-27. Подобное измерительное устройство 13 могло бы быть расположено, как это предусмотрено в примере осуществления, в области концевой заделки 16 каната (см. фиг. 6).
Действующие силы натяжения в подъемных канатах 20-27 могут определяться в измерительном положении транспортного устройства 1, в котором грузозахватное устройство 3 свободно висит. При несимметричных грузах, то есть в частности при неравномерно нагруженных контейнерах 31, могут возникать сильно различные силы натяжения в подъемных канатах 20-27. Для того чтобы предотвращать перегрузку отдельных подъемных канатов 20-27 при транспортировке такого контейнера 31, максимальное ускорение контейнера и/или максимальная скорость перемещения предпочтительно ограничивается в зависимости от измеренных в измерительном положении сил натяжения канатов. Посредством приводимых в движение независимо друг от друга канатных барабанов 4 также возможно достигать выравнивания действующих в подъемных канатах 20-27 сил натяжения канатов, благодаря тому, что посредством точного позиционирования грузозахватного устройства нагрузка распределяется соответствующим образом по действующим подъемным канатам 20-27.
Кроме того, в примере осуществления предусмотрено то, что грузозахватное устройство 3 или контейнер 31 может смещаться в своей ориентации при помощи приводимых в движение независимо друг от друга канатных барабанов 4, для того чтобы дополнительно выравнивать различные, в частности при неравномерно нагруженных контейнерах 31, силы натяжения в подъемных канатах 20-27 или распределять нагрузку по подъемным канатам 20-27.
Выравнивание сил натяжения в подъемных канатах 20-27 осуществляется предпочтительно во время итогового движения контейнера 31 или грузозахватного устройства 3. Также динамически возникающие нагрузки отдельных подъемных канатов 20-27, например, ввиду воздействующих внезапно на контейнер 31 или грузозахватное устройство 3 ветровых усилий, могут компенсироваться посредством выравнивания сил натяжения канатов.
Кроме того, благодаря применению, по меньшей мере, восьми подъемных канатов 20-27 возможно, что при разрыве одного из подъемных канатов 20-27 оставшиеся семь подъемных канатов воспринимают нагрузку контейнера 31, и таким образом достигается высокая отказоустойчивость транспортного устройства 1, без того чтобы возникало существенное сокращение устойчивости канатной шахты.
В примере осуществления согласно фиг. 7 и 8 транспортное устройство 1 используется в кране 30, выполненном в виде козлового крана. Ходовая тележка 2 транспортного устройства 1 может перемещаться вдоль пролетной балки 33 крана 30. Для этого ходовая тележка 2 имеет рабочие колеса 15, которые прокатываются по не изображенным более подробно ходовым рельсам пролетной балки 33. Весь кран 30 может перемещаться по подкрановым рельсам 32 в продольном направлении подкрановых рельсов 32. Движение в направлении подкрановых рельсов 32 и вдоль пролетной балки 33 служит для грубого позиционирования транспортного устройства 1.
В примере осуществления предусмотрено, что соответствующий подъемный канат развернут на отклоняющем ролике 12. Также допустимо и возможно, что соответствующий подъемный канат неподвижно закреплен анкерным креплением на грузозахватном устройстве 3 при помощи концевой заделки каната. Также при анкерном креплении подъемных канатов на грузозахватном устройстве входящие в зацепление с одной продольной или торцевой стороной грузозахватного устройства подъемные канаты перекрещиваются предпочтительным образом, причем подъемные канаты, входящие в зацепление с одной продольной или торцевой стороной, образуют одну единственную точку пересечения.
В определенных примерах осуществления грузозахватное устройство 3 могло бы дополнительно иметь поворотный блок, для того чтобы делать возможным поворот контейнера на большие углы, как например 90° или более.
В противоположность показанному примеру осуществления допустимо и возможно, что соответственно, по меньшей мере, два канатных барабана приводятся в движение одним общим двигателем. В этом случае при помощи вариативного распределительного редуктора канатные барабаны могли бы приводиться в движение индивидуально в различных направлениях вращения и/или с различными частотами вращения.
Транспортное устройство согласно изобретению может также адаптироваться к другим грузам. Оно не ограничено транспортировкой контейнеров.
В других вариантах осуществления транспортное устройство 1 могло бы также использоваться в мостовом кране или в другом кране.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 транспортное устройство
2 ходовая тележка
3 грузозахватное устройство
4 канатный барабан
5 двигатель
6 редуктор
7 продольная сторона
8 продольная сторона
9 торцевая сторона
10 торцевая сторона
11 точка пересечения
12 отклоняющий ролик
13 измерительное устройство
14 соединительное устройство
15 рабочее колесо
16 концевая заделка каната
17 ось вращения
20 подъемный канат
21 подъемный канат
22 подъемный канат
23 подъемный канат
24 подъемный канат
25 подъемный канат
26 подъемный канат
27 подъемный канат
30 кран
31 контейнер
32 подкрановый рельс
33 пролетная балка
34 продольная сторона
35 торцевая сторона
40 первое направление
41 второе направление
42 направление поворота
43 третье направление
44 направление поворота
45 направление поворота
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2018 |
|
RU2695940C1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 1993 |
|
RU2049038C1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕДВИЖЕНИЯ ГРУЗА | 2001 |
|
RU2194005C2 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ УСТРОЙСТВА ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК УКАЗАННОГО КРАНА | 2016 |
|
RU2709322C2 |
| КРАН, А ТАКЖЕ СПОСОБ КОНТРОЛЯ ПРЕДОХРАНЕНИЯ ОТ ПЕРЕГРУЗОК ТАКОГО КРАНА | 2016 |
|
RU2722326C2 |
| ПОДЪЕМНАЯ УСТАНОВКА ДЛЯ ОТКРЫТЫХ ГОРНЫХ РАБОТ (ВАРИАНТЫ) | 2000 |
|
RU2240274C2 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВАНИЯ ГОРНОЙ МАССЫ | 1994 |
|
RU2119055C1 |
| Трелевочная каретка подвесной канатной дороги | 1986 |
|
SU1355527A1 |
| УСТРОЙСТВО ДЛЯ УСПОКОЕНИЯ РАСКАЧИВАНИЯ ГРУЗОЗАХВАТНОГО ОРГАНА | 2002 |
|
RU2209761C1 |


Транспортное устройство (1) для транспортировки по меньшей мере одного контейнера (31) или другого груза имеет по меньшей мере одну ходовую тележку (2), по меньшей мере одно грузозахватное устройство (3) и по меньшей мере восемь подъемных канатов (20-27). Грузозахватное устройство (3) имеет соединительные устройства (14) для закрепления контейнера (31) или другого груза и при помощи подъемных канатов (20-27) подвешено на ходовой тележке (2) с возможностью подъема и опускания, причем подъемные канаты (20-27) могут наматываться на установленные на ходовой тележке (2) с возможностью вращения канатные барабаны (4). Каждый подъемный канат (20-27) может наматываться и/или по меньшей мере частично намотан на собственном канатном барабане (4). У всех канатных барабанов (4) частота вращения и/или направление вращения может устанавливаться соответственно индивидуально. Достигается уменьшение веса грузозахватного устройства. 4 н. и 6 з.п. ф-лы, 8 ил.
1. Транспортное устройство (1) для транспортировки по меньшей мере одного контейнера (31) или другого груза, причем транспортное устройство (1) имеет по меньшей мере одну ходовую тележку (2), по меньшей мере одно грузозахватное устройство (3) и по меньшей мере восемь подъемных канатов (20-27), и грузозахватное устройство (3) имеет соединительные устройства (14) для закрепления контейнера (31) или другого груза и при помощи подъемных канатов (20-27) подвешено на ходовой тележке (2) с возможностью подъема и опускания, причем подъемные канаты (20-27) могут наматываться на установленные на ходовой тележке (2) с возможностью вращения канатные барабаны (4),
отличающееся тем, что
каждый подъемный канат (20-27) может наматываться и/или по меньшей мере частично намотан на собственном канатном барабане (4) и у всех канатных барабанов (4) частота вращения и/или направление вращения может устанавливаться соответственно индивидуально.
2. Транспортное устройство (1) по п.1, отличающееся тем, что грузозахватное устройство (3) имеет две противоположные друг другу продольные стороны (7, 8) и две ориентированные по нормали к продольным сторонам (7, 8), противоположные друг другу торцевые стороны (9, 10), причем с каждой из торцевых сторон (9, 10) и продольных сторон (7, 8) входят в зацепление по меньшей мере два из подъемных канатов (20-27), и соответственно входящие в зацепление с одной торцевой стороной (9, 10) подъемные канаты (20, 21; 22, 23) образуют, если смотреть в направлении параллельно к продольным сторонам (7, 8), по меньшей мере одну точку (11) пересечения, и/или соответственно входящие в зацепление с одной продольной стороной (7, 8) подъемные канаты (24, 25; 26, 27) образуют, если смотреть в направлении параллельно к торцевым сторонам (9, 10), по меньшей мере одну точку (11) пересечения.
3. Транспортное устройство (1) по п.1 или 2, отличающееся тем, что по меньшей мере один из подъемных канатов (20-27), предпочтительно каждый подъемный канат (20-27), развернут на грузозахватном устройстве (3) при помощи отклоняющего ролика (12) и обращенный от канатного барабана (4) конец подъемного каната (20-27) закреплен анкерным креплением на ходовой тележке (2).
4. Транспортное устройство (1) по любому из пп. 1-3, отличающееся тем, что транспортное устройство (1) имеет предпочтительно для каждого подъемного каната (20-27) по меньшей мере одно измерительное устройство (13) для определения силы натяжения каната, действующей в одном из подъемных канатов (20-27), предпочтительно в соответствующем подъемном канате (20-27).
5. Транспортное устройство (1) по любому из пп. 1-4, отличающееся тем, что каждый канатный барабан (4) приводится в движение по отдельности собственным двигателем (5), предпочтительно электродвигателем.
6. Транспортное устройство (1) по п.4 или 5, отличающееся тем, что измерительное устройство (13) расположено на упоре против проворачивания редуктора (6), причем редуктор (6) действует между канатным барабаном (4) и двигателем (5).
7. Транспортное устройство (1) по любому из пп. 4-6, отличающееся тем, что измерительное устройство (13) для регистрации силы натяжения каната расположено на обращенном от канатного барабана (4) конце подъемного каната (20-27).
8. Способ транспортировки по меньшей мере одного контейнера (31) или другого груза при помощи транспортного устройства (1) по любому из пп. 1-7, причем поступательное и/или вращательное движение по меньшей мере одного подвешенного на грузозахватном устройстве (3) контейнера (31) или другого груза, предпочтительно в шести степенях свободы, осуществляют исключительно посредством соответствующего наматывания и разматывания подъемных канатов (20-27) транспортного устройства (1) на соответствующем канатном барабане (4) и канатные барабаны (4) приводят для этого в движение соответствующим образом.
9. Способ транспортировки по меньшей мере одного контейнера (31) или другого груза при помощи транспортного устройства (1) по любому из пп. 4-7, причем силы натяжения по меньшей мере одного подъемного каната (20-27), предпочтительно каждого подъемного каната (20-27), измеряют для предотвращения перегрузки и канатные барабаны (4) приводят соответствующим образом в движение по отдельности независимо друг от друга.
10. Кран (30), предпочтительно козловой кран, включающий в себя по меньшей мере одно транспортное устройство (1) по любому из пп. 1-7.
| Гаечный ключ с устройством для ограничения крутящего момента | 1960 |
|
SU141817A1 |
| DE 202006000490 U1, 27.04.2006 | |||
| DE 102004040663 A1, 02.03.2006 | |||
| Грузовая подвеска для крана мостового типа | 1977 |
|
SU701916A1 |

