Иэобрете;1 1ше относится к нзмери- 1а;;Ы|Лй технике, а именно к способам определения координат объекта, обла- д/лющего магнитным моментом, по изме- рению рго магнитного поля и может быть использовано для слежения за перемешением этого объекта.
Цель изобретения - повышение точности измерения за счет исключения MeTOAtmecKoft погрешности и погрешности, обусловленной флуктуациями естественного магнитного поля Земли.
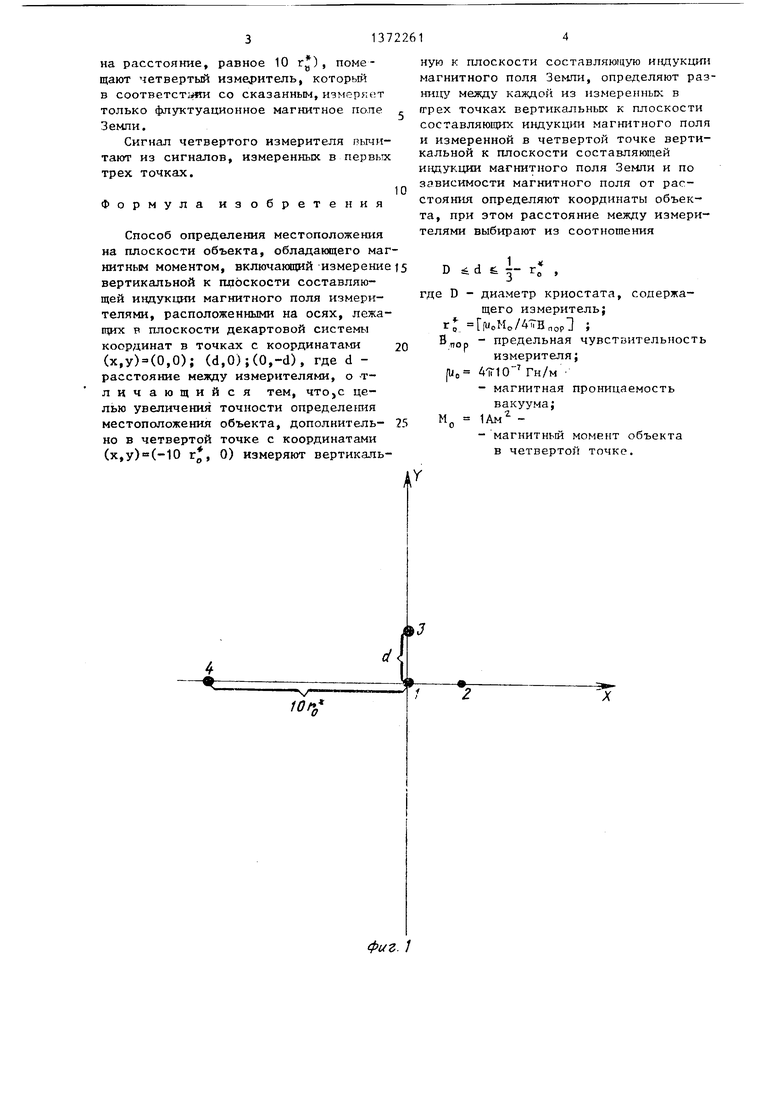
На фиг. 1 изображено расположение четьфех измерителей на плоскости; на фиг. 2 - структурная схема одного из возможных устройств, реализующих способ.
Устройство содержит четыре входных преобразователя 1-4 (),вы- полненных на основе стандартных сверпроводниковых приемных петель, четыре детектора 5-8, выполненных, например, по общеизвестной схеме на основе СКВИДов, три вычитающих устро ства 9-11, в качестве которых могут быть использованы стандартные дифференциальные усилители.
Выходы входных; преобразователей 1-4 подк.Г1ЮЧ- :ны к входам детекторов 5-8 соответс гвеяно. детекторов 6-3 подключены . сумг-гирующим гх -дам пьг итаюНл-пг ус- ройств 9-11 со- . гг вйтс ггс-нно, а , детг-.гора 5 - к вычитающие ьх- там i-rex нычитающ1-1х 1Локов., п:;.;ходь эторых: выходами устрсгстпа.
Постав. ;енкяя цель достигается тем что в способе о ределе ия местоположния на пл11С,ост11 объекта. обла, ;г1юще- го магни ш.1М моментом при котором измеряют вертик-ксьмую к плоскости составляющую ин;т, магнит,чого ноля измерит.ялямз-г4 расположенными на осях лежащей в ллоскости декартовой си- стемы координат в точкам с координатами (х,у) (0,0); (d.O); (0,d где d - {.асстояни : мржду измеритеяя- ми, выбираем; - в соответствии с
мулой D . d --- Го 4 г Де D - криостлта, содержащего измеритель,
--- lUcMo/ ,;j , где В„ор- пре- ,пельная чувствительность измерителя, М5 1 А м , дополнительно к четвер- той точк с коордииатаЬш (х,у) (-10 1 ,0)итмеряют вертикальную к плоскости составляющ то иш: ,укции туафш млт Н( поля Земпи, затем
находят разницу между каждой из измеренных в трех точках вертикальных к плоскости составляющих индукции магнитного поля и измеренной в .четвертой точке вертикальной к плоскости составляющей индукции магнитного поля Земли и по зависимости магнитного поля от расстояния определяют координаты объекта.
Способ осуществляют следующим образом;
Измеряют значения вертикальных составляющих индукции магнитного поля в трех точках с координатами (0,0), (d,0) и (0,-d). Вертикальные составляющие индукц Ш магнитного поля связаны с координатами объекта следующим образом
-||-М,«х . /),
- j н, / (x-d) /:
J/2
, , . (y.d)
где х,у - координаты объекта, которые определяются по Е , В, В, следующим образом
d d (a+b)(a-1) b
ъ(а:;):1Чь и
d d (a-t-bi b-l a „ Г Г ЬЧа-1Г аЧЬ-Т
где
.- 2 blia;l)(b;1) J
(a+b)
г/
-гп
(.В.,) .
а (,)
В„ , В, , В, - вертикальные составляющие индукции магнитног о поля,
ИЗ с ренные в точках, имеющих соответственно координаты (0,0), (d,0), (O.d).
В четвертой точке, удаленной от riepEtrx тррх на достаточно больлое расстояние так, чтобы в гшой точке магнитное иоле объекта было много меньше B-j (указанное условие зьшол- няется, если четвертую точку удалить
на расстояние, равное 10 г), помещают четвертый измел итель, который в соответстьдаи со сказанным,измеряет только флуктуационное магнитное поле Земпи.
Сигнал четвертого измерителя пычи- тают из сигналов, измеренных в первых трех точках.
Формула изобретения
Способ определения местоположения на плоскости объекта, обладающего магнитным моментом, включающий измерение вертикальной к Щ1оскости составляющей индукции магнитного поля измерителями, расположенными на осях, лежащих в плоскости декартовой системы координат в точках с координатами (х,у)(0,0); (d,0);(0,-d), где d - расстояние между измерителями, о -т- личающийся тем, что,с целью увеличения точности определеютя местоположения объекта, дополнительно в четвертой точке с координатами (х,у)(-10 г, 0) измеряют вертикаль
0
5
ную к плоскости составляющую индукции магнитного поля Земли, определяют разницу между каждой из измеренных в ггрех точках вертикальных к плоскости составляющих индукции магнитного поля и измеренной в четвертой точке вертикальной к плоскости составляющей индукции магнитного поля Земпи и по зависимости магнитного поля от расстояния определяют координаты объекта, при этом расстояние между измерителями выбирают из соотношения
D d & |- г ,
где D - диаметр криостата, содержащего измеритель;
г r,-UoMo/4TBnopl ;
В„ор - предельная чувствительность
измерителя; lio 4710 Гн/м
- магнитная проницаемость
вакуума; MO 1Ам - магнитный момент объекта в четвертой точке.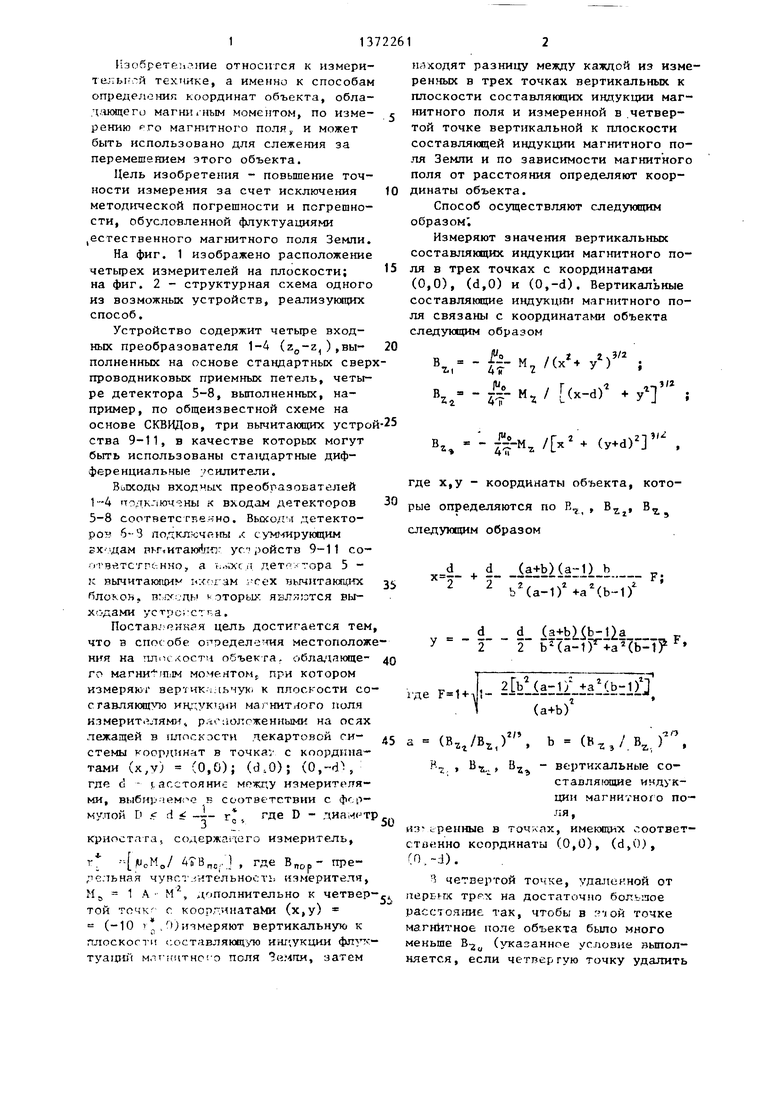
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ С ПОДВИЖНОГО ОБЪЕКТА | 2002 |
|
RU2219497C1 |
| СПОСОБ ЛЕОНОВИЧА СЧИТЫВАНИЯ ТРЕХМЕРНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2074419C1 |
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 2012 |
|
RU2503026C1 |
| СПОСОБ ЛОКАЛИЗАЦИИ ИСТОЧНИКА МАГНИТНОГО ПОЛЯ ДИПОЛЬНОЙ МОДЕЛИ | 2010 |
|
RU2433420C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ | 1991 |
|
RU2015565C1 |
| СПОСОБ ГЕОЭЛЕКТРОРАЗВЕДКИ | 2005 |
|
RU2302018C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ЕГО ВАРИАНТЫ) | 1996 |
|
RU2103664C1 |
| Способ измерения напряженности электростатического поля | 1986 |
|
SU1423968A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2690526C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КРАТЧАЙШЕГО РАССТОЯНИЯ И НАПРАВЛЕНИЯ НА ЛИНИЮ ЭЛЕКТРОПЕРЕДАЧИ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2006 |
|
RU2316790C1 |
Изобретение относится к области измерительной техники. Способ определения местоположения на плоскости объекта, обладающего магнитным моментом, заключается в следующем. Измеряют вертикальную к плоскости составляющую индукции магнитного поля (МП) измерителями, расположенными на осях лежащей в плоскости декартовой системы координат в точках с координатами (х,у) (0,0); (d, 0); (О, - d), где d - расстояние между измерителями. Б четвертой точке (ЧТ) с координатами (х, у) « (-ЮГд, 0)измеряют вертикальную к плоскости составляющую индукции МП Земли. Определяют разницу между каждой из измеренных в трех точках вертикальных к плоскости составляющих индукции МП и измеренной в ЧТ вертикальной к плоскости составляющей индукции МП Зеьши и по зависимости МП от расстояния опреде- ля1от координаты объекта. При этом расстояние между измерителями берут из соотношения D d 1/3 r , где D- диаметр криостата, содержащего измеритель; г |UcMo/4Tr , 7, где В - предельная чувствительность измерителя; fUj, 47 10 Гн/м - Мсягннтная проницаемость вакуума; Мд - магнитный момент объекта в ЧТ. Способ имеет высокую точность определе1шя. 2 ил. « С/) кд 1О ю 05
фиг. 1
| Wynn W.M., Fram С.P | |||
| et al | |||
| Advanced superconducting gradi metei/ magnetometer arrays and a novel signal processing technique | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
