со
1C СП
Изобретение относится к электротехнике и может быть использовано для регулирования тока нагрузки ти- ристорного электропривода постоянного тока в условиях изменения или неточного определения параметров якорной цепи электропривода.
Цель изобретения - повьппение точности регулирования тока.
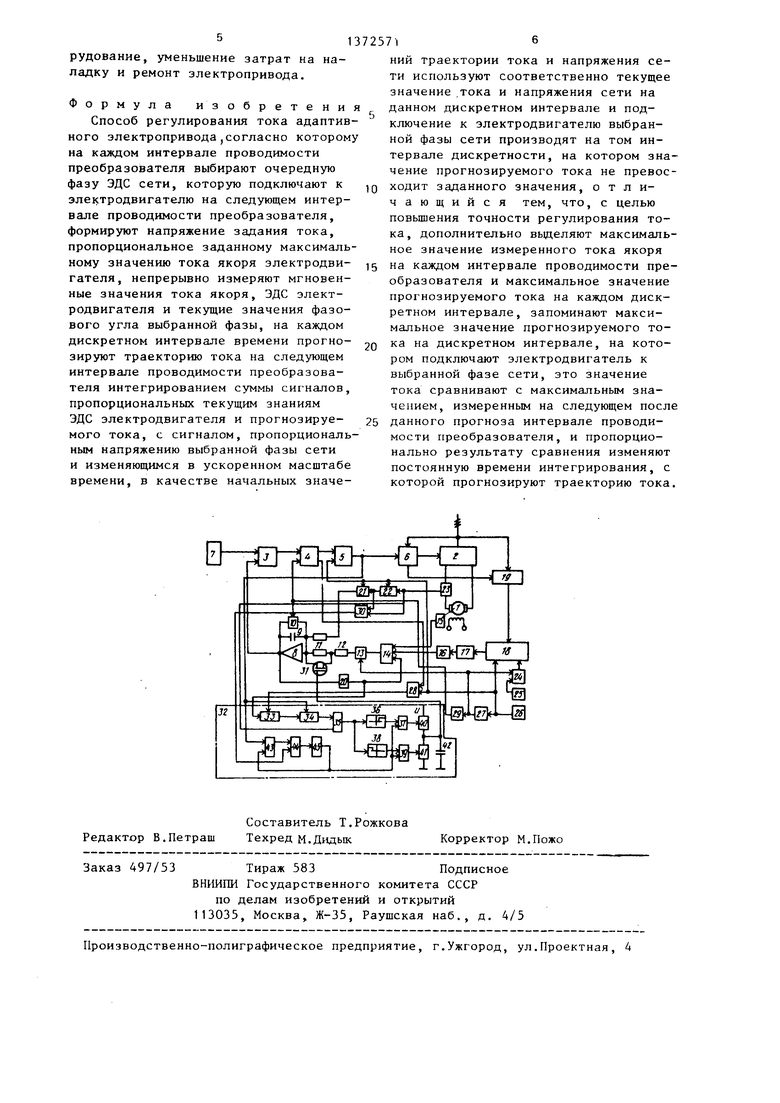
На чертеже представлена функциональная схема устройства, реализующего способ регулирования тока адаптивного электропривода.
Устройство содержит электродвигатель 1 постоянного тока, подключенный к тиристорному преобразователю 2 в цепь управления которого включены последовательно соединенные блок 3
мого ключа 13 и через блок 29 дифференцирования с управляющим входом управляемого ключа 10 и входом Сброс
триггера 4, выход которого соединен с вторым входом логического элемента И 28. Выход датчика 23 тока непосредственно и через блок 22 памяти связан с входами компаратора 30. Резистор 11
шунтирован транзистором 31, затвор« которого связан с выходом блока 32 подстройки.
Блок 32 подстройки содержит последовательно включенные амплитудный
детектор 33, блок 34 памяти и блок 35 сравнения, выходы которого через две последовательные цепи, состоящие первая из блока 36 нелинейности и логического элемента И 37 а вторая 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования тока вентильногоэлЕКТРОпРиВОдА пОСТОяННОгО ТОКАи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU801215A1 |
| Способ управления тиристорным электроприводом | 1984 |
|
SU1169127A1 |
| Способ управления тиристорным электроприводом | 1987 |
|
SU1457139A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДУГОВОЙ СВАРКИ НЕПЛАВЯЩИМСЯ ЭЛЕКТРОДОМ В СРЕДЕ ЗАЩИТНЫХ ГАЗОВ | 1988 |
|
SU1683244A1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Вентильный электродвигатель | 1984 |
|
SU1325632A1 |
| Адаптивный регулятор тока для управляемых вентильных преобразователей | 1990 |
|
SU1786627A1 |
| Устройство для моделирования вентильного преобразователя | 1981 |
|
SU968829A1 |
Изобретение относится к электротехнике и м.б. использовано в ти- ристорном электроприводе постоянного тока. Пелью изобретения является повышение точности регулирования тока. Способ позволяет на каждом дискретном интервале времени проводить прогнозирование траектории тока якоря на следующем интервале проводимости преобразователя. Максимальное значение измеряемого тока якоря, выделенное на следующем интервале проводимости, сравнивают с заполненным максимальным значением прогнозируемого тока. Если максимум измеряемого тока больше или меньше прогнозируемого, то соответственно уменьшают или увеличивают постоянную времени интегрирования, с которой прогнозируют траекторию тока. Т.о. достигается точное соответствие между прогнозируемой и реальной траекториями тока. 1 KJ( . о (Л
сравнения, триггер 4, логический эле-20 из блока 38 нелинейности и логическомент И 5 и блок 6 импульсного управления. Входы блока 3 сравнения связаны с блоком 7 задания тока и с выходом операционного усилителя 8, в цепь
го элемента И 39, подключены к упр ляющим входам управляемых ключей 4 и 41, второй из которых шунтирован конденсатором 42. Кроме того, в бл
обратной связи которого включен кон- 25 подстройки входят последовательно денсатор 9, шунтированный управляемым ключом 10. Один из входов операционного усилителя 8 через последовательно соединенные резисторы 11 и 12 и первый управляемый ключ 13 связан с 30 выходом сумматора 14, входы которого соединены соответственно с выходом датчика 15 ЭДС, через последовательно включенные цифроаналоговый преобразователь 16, преобразователь 17 jj цифра-цифра и счетчик 18 с выходом блока 19 задания текущего угла в очередной фазе и через инвертор 20 с выходом операционного усилителя 8. Блок
соединенные триггер 43, логический элемент И 44 и одновибратор 45, вы которого подключен к вторым входам логических элементов И 37 и 39 и в ду Сброс триггер1а 43, второй вхо которого и вход управления блока 3 памяти связаны с выходом логическо элемента И 5. Вход амплитудного де тектора 33 соединен с выходом инве тора 20, а его управляющий вход по ключен к выходу логического элемен та И 28. Второй вход блока 35 срав нения подключен к выходу датчика 23 тока, а второй вход логического элемента И 44 связан с выходом ком паратора 30.
19 задания текущего угла связан входами с сетью и с блоком 6 импульсного управления. Второй вход операционного усилителя 8 через второй управляемый ключ 21 и блок 22 памяти соединен с выходом датчика 23 тока.
Второй вход счетчика 18 подключен к выходу логического элемента И 24, второй вход которого связан с выходом первого генератора 25 импульсов. Выхдд генератора 26 импульсов подключен к третьему входу счетчика 18, ду логического элемента НЕ 27, одном из входов логического элемента И 28, управляющим входам управляемого ключа 21 и блока 22 памяти и второму входу логического элемента И 5. Выход логического элемента НЕ 27 связан с вторым входом логического элемента И 24, с управляющим входом управляе
вх
го элемента И 39, подключены к управляющим входам управляемых ключей 40 и 41, второй из которых шунтирован конденсатором 42. Кроме того, в блок
5 подстройки входят последовательно 0 j
0
5
0
5
соединенные триггер 43, логический элемент И 44 и одновибратор 45, выход которого подключен к вторым входам логических элементов И 37 и 39 и входу Сброс триггер1а 43, второй вход которого и вход управления блока 34 памяти связаны с выходом логического элемента И 5. Вход амплитудного детектора 33 соединен с выходом инвертора 20, а его управляющий вход подключен к выходу логического элемента И 28. Второй вход блока 35 сравнения подключен к выходу датчика 23 тока, а второй вход логического элемента И 44 связан с выходом компаратора 30.
Способ осуществляют следующим образом.
С помощью блока 6 импульсного управления формируется дискретньш интервал времени, на котором выбирают очередную фазу напряжения сети, подключаемую к электродвигателю 1 на следующем интервале проводимости. Датчики 23 тока и 15 ЭДС непрерьшно измеряют соответственно мгновенные значения тока и ЭДС двигателя. С помощью блока 19 задания текущего угла в очередной фазе формируется текущее значение угла напряжения сети выбранной фазы. Это значение угла по переднему фронту сигнала генератора 26 вводят в счетчик 18 в качестве исходного состояния и формируют текущий угол напряжения сети в ускоренном масштабе времени, определяемом частотой генератора 25 из условия обеспечения возможности задания по- ловины периода напряжения сети на даном дискретном интервале времени. Эт частота подается на счетный вход счетчика 18 через элемент И 24. По сигналу генератора 26 с помощью клю- ча 21 от датчика 23 тока через блок 22 памяти на вход операционного усилителя 8 подается значение тока в начале дискретного интервала времени. Одновременно с помощью элемента НЕ 27 и дифференцирующего блока 29 выхо триггера 4 устанавливается в единичное состояние.
Затем по сигналу генератора 26 через -элемент НЕ 27 с помощью ключа 13 на вход операционного усилителя 8 подается разность между напряжением сети в ускоренном масштабе времени (с выхода сметчика 18 через преобразователь 17 цифра-цифра и цифроанало- говый преобразователь 16) и ЭДС элекродвигателя. С вьсхода операционного усилителя 8 сигнал, пропорциональньш прогнозируемой траектории тока, подается на вход блока 3 сравнения, где сравнивается с заданным максимальным значением тока. В результате сравнения на каждом дискретном интервале времени выход триггера 4 устанавливается в нулевое состояние при пре- вьшении траектории тока величины задания.
В конце интервала дискретности с помощью элемента И 5 проверяется состояние триггера 4 и, если выход триггера 4 остался в единичном состоянии то через блок 6 и тиристорный преобразователь 2 подается к двигателю выбранное напряжение сети.
С выхода инвертора 20 сигнал, пропорциональный прогнозируемой траектории тока, подается на амплитудный детектор 33, который запоминает максимальное значение прогнозируемого тока, рассчитанное на интервале дискретности. В конце интервала дискретности в случае превышения сигналом, пропорциональным прогнозируемой траектории тока, сигнала задания с помощью элемента И 28 выход амплитудного детектора 33 устанавливается в нулевое состояние. При этом по сигналу с выхода элемента И 5 выход триггера 43 устанавливается в единичное
г ю 15
2025 зо
Q
35
5
состояние. В случае непревышения сигналом, пропорциональньм прогнозируемой кривой тока, сигнала задания срабатывает триггер 4, формируется сигнал на включение очередного тиристора и по переднему фронту выходного сигнала элемента И 5 вьделенное амплитудным детектором 33 максимальное значение записывается в блок 34 памяти .
На выходе блока 35 сравнения формируется сигнал, пропорциональный разности между максимальным значением прогнозируемого тока, запомненного при включении тиристора, и действительным током якоря электродвигателя. Суммарный сигнал подается на два нелинейных элемента 36 и 38, имеющих зону нечувствительности, и в зависимости от знака суммарного сигнала на выходе одного из нелинейных элементов 36 или 38 появляется сигнал, который подается на первый вход элемента И 37 или первый вход элемента И 39. Выход компаратора 30 устанавливается в единичное состояние при достижении током якорной цепи двигателя максимального значения. Этот сигнал подается на элемент И 44, при этом запускается одновибратор 45, который своим выходным сигналом через элемент И 37 или элемент И 39 включает ключ 40 или 41, в результате чего конденсатор 42 заряжается или разряжается. Напряжение с конденсатора подается на затвор транзистора 31, который, изменяя свое сопротивление, корректирует постоянную времени интегратора. Тем самым, в данном устройстве обеспечивается точное соответствие между прогнозируемой и реальной траекториями тока.
Применение предлагаемого способа регулирования по сравнению с известным повьшает точность регулирования тока в условиях изменения параметров якорной цепи. Кроме того, значительно упрощается процесс наладки системы регулирования, так как не требуется высокая точность при определении параметров якорной цепи, тогда как наладка известной системы предполагает точное определение этих параметров. Результатом применения способа на практике может явиться уменьшение избыточной нагрузки на электродвигатель и механическое оборудование, уменьшение затрат на наладку и ремонт электропривода.
Формула из обретени Способ регулирования тока адаптивного электропривода,согласно котором на каждом интервале проводимости преобразователя выбирают очередную фазу ЭДС сети, которую подключают к электродвигателю на следующем интервале проводимости преобразователя, формируют напряжение задания тока, пропорциональное заданному максимальному значению тока якоря электродвигателя, непрерывно измеряют мгновенные значения тока якоря, ЭДС электродвигателя и текущие значения фазового угла выбранной фазы, на каждом дискретном интервале времени прогнозируют траекторию тока на следующем интервале проводимости преобразователя интегрированием суммы сигналов, пропорциональных текущим знаниям ЭДС электродвигателя и прогнозируемого тока, с сигналом, пропорциональным напряжению выбранной фазы сети и изменяющимся в ускоренном масштабе времени, в качестве начальных значении траектории тока и напряжения сети используют соответственно текущее значение ,тока и напряжения сети на данном дискретном интервале и подключение к электродвигателю выбранной фазы сети производят на том интервале дискретности, на котором значение прогнозируемого тока не превосходит заданного значения, отличающийся тем, что, с целью повышения точности регулирования тока, дополнительно выделяют максимальное значение измеренного тока якоря
на каждом интервале проводимости преобразователя и максимальное значение прогнозируемого тока на каждом дискретном интервале, запоминают максимальное значение прогнозируемого тока на дискретном интервале, на котором подключают электродвигатель к выбранной фазе сети, это значение тока сравнивают с максимальным значением, измеренным на следующем после
данного прогноза интервале проводимости преобразователя, и пропорционально результату сравнения изменяют постоянную времени интегрирования, с которой прогнозируют траекторию тока.
| РУЧНОЕ УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ ЛУНОК ПОД ПОСАДКУ КОНТЕЙНЕРИЗИРОВАННЫХ СЕЯНЦЕВ | 2001 |
|
RU2202871C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ регулирования тока вентильногоэлЕКТРОпРиВОдА пОСТОяННОгО ТОКАи уСТРОйСТВО для ЕгО ОСущЕСТВлЕНия | 1979 |
|
SU801215A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
