Изобретение относится к системам автоматического управления и автоматизированного электропривода и может быть использовано в системах управления станков, промышленных работ и другого оборудования, требующего ре гулирования скорости перемещения.
. Целью изобретения является повышение надежности привода.
На чертеже приведена структурная схема следящего электропривода.
Электропривод состоит из первого сумматора 1, регулятора 2 скорости, первого корректирующего устройства 3, второго сумматора 4, формироватея 5 гармонических сигна лов (форми ругощего либо синус и косинус, либо два сдвинутых на друг относительно друга синуса), преобразователя 6 координат (работающего в по- ярных или декартовых координатах), вычислителя 7 фазных ЭД С, второго «,. третьего 9, четвертого 10 корректирующих устройств, первого 11, второго 12, третьего 13 ограничителей сигналод, третьего 14, четвертого 15, пятого 16 сумматоров, трехфазного усилителя 17 мощности, трехфазного асинхронного двигателя 18 и датчика 19 скорости.
Преобразователь 6 координат выабатывает сигналы задания фазных оков , , Изфс на основании сигналов задания момента ( /J., - как прототипе), гармонических сигнаов (sin и coso jjjt - как в протоипе для. прив одов, работающих в декартовых системах координат) и сигнала задания составляющей тока статора 1,зы.
Блок 7 - формирователь фазных ЭДС бд., вырабатывает сигналы фазных ЭДС на основе сигналов частоты к гармонических сигнало.
Схема работает следующим обра- зом.
Сигнал задания скорости поступает на первый вход первого сумматора 1, на второй вход которого поступает сигнал с датчика 19 скорости. Сумма этих сигналов поступает на вход регулятора 2 скорости, выходной сигнал с которого является сигнал.ом задания момента двигателя, поступающим на первый вход преобразователя 6 координат, на второй вход которого поступает сигнал задания потокосцеп- ления (или составляющей тока статора) . На третий и четвертый входы преобразователя координат поступают гармонические сигналы с формирователя 5 гармонических сигналов, на вход которого поступает сигнал задания частоты с сумматора 4, суммирующего сигналы с датчика 19 скорости и с выхода корректирующего
устройства 3, преобразуюп1его сигнал с регулятора 2 скорости. На выходе преобразователя 6 координат формируются сигналы задания фазных токов, которые ограничиваются и корректи5 руются в корректирующих устройствах 8 - 10 и ограничителях 11 - 13, Кроме того, сигнал задания .частоты с сумматора 4 и гармонические сигналы с формирователя 5 гармонических сигQ налов поступают «а первь:й, второй и третий входы формирователя фазных ЭДС, на выходе которого формируются сигналы фазных ЭДС, поступающие на вторые входы сумматоров 14 - 16, на
5 первые входы которых поступают сигналы с ограничителей П, 12. Сигналы с выходов сумматоров поступают на первый, второй и третий входы трехфазного усилителя 17 мощности, сигнаQ лы с которого поступают на двигатель.
Фо.рмула изобретения Следящий электропривод, содержа- ; щий первый сумматор, на первый вход которого поступает сигнал задания I, скорости, регулятор скорости, вход которого соединен с выходом первого сумматора, первое корректирующее устройство, .вход которого соединен Q с выходом регулятора скорости, второй сумматор, первый вход которого соединен с выходом первого корректирующего устройства, формирователь гармонических сигналов, вход которого соединен с выходом второго сумматора, преобразователь координат, первый вход которого соединен с выходом регулятора скорости, на второй вход поступает сигнал задания пото- косцепления, третий и четвертый входы которого соединены соответственно с первым и вторым выходами формирователя гармонических сигналов, вычислитель фазных ЭДС, первый .и второй входы которого соединены соответственно с первым и вторым выхода- .ми формирователя гармонических сигналов, третий вход соединен с выходами второго сумматора, второго, тре5
5
0
5
тьего и четвертого корректирующих устройств, входы которых соединены соответственно с первым, вторым и третьим выходами преобразователя координат, трехфазного усилителя мощности, трехфазного асинхронного двигателя, первый, второй и третий входы которого соединены соответственно с первым, вторым и третьим выходами трехфазного усилителя мощности, датчик скорости, вход которого соединен с выходом двигателя, а выход - с вторыми входами первого и второго сумматоров, отличающийся тем, что, с целью повьшения надежности электропривода, в него введены
0
5
324
первый, второй и третий ограничители сигналов, третий, четвертый и пятый сумматоры, причем входы ограничителей сигналов соединены с выходами соответственно второго, третьего и четвертого корректирующих устройств, а выходы - с первыми входами соответ ственно третьего, четвертого и пятого сумматоров, вторые входы которых соединены соответственно с первым, вторым и третьим выходами вычислителя фазных ЭДС, а выходы третьего, четвертого и пятого сумматоров соединены соответственно с первым, вторым и третьим входами трехфазного усилителя мощности.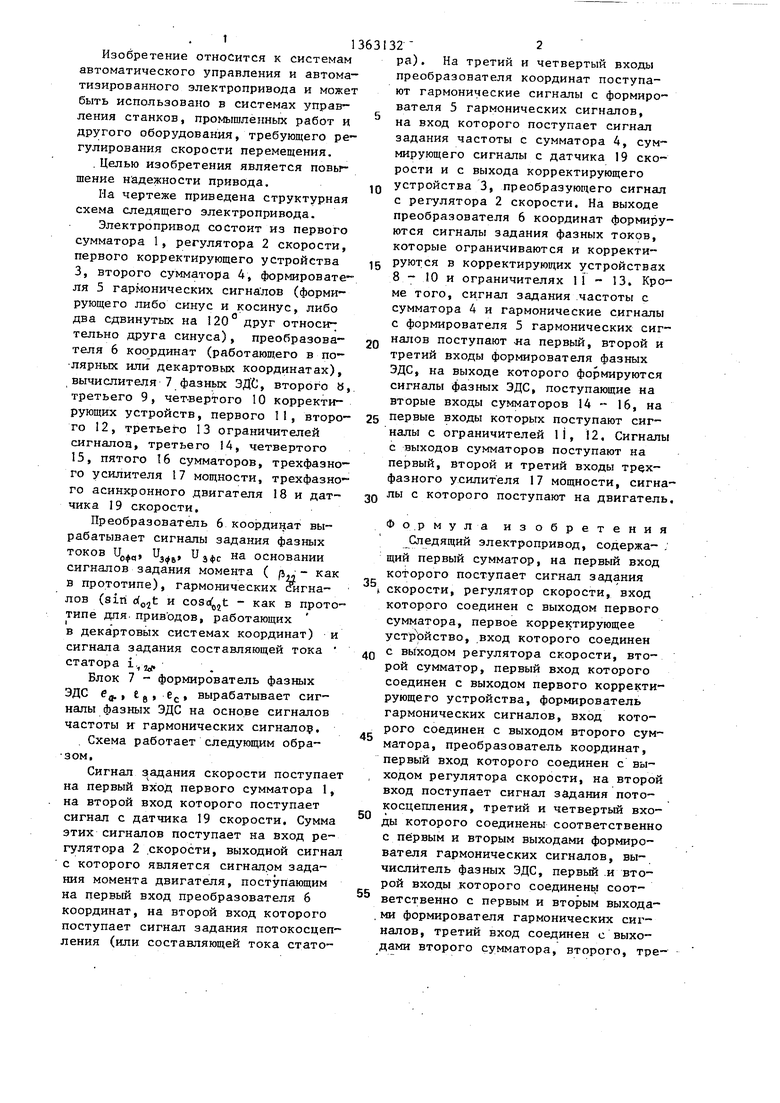
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотнорегулируемый синхронный электропривод | 1983 |
|
SU1108596A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Частотно-управляемый электропривод | 1986 |
|
SU1374392A1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Электропривод переменного тока | 1986 |
|
SU1345302A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |

Изобре,тение относится .к системам автоматического управления и автоматизированного электропривода. Цель изобретения - повышение надежности электропривода. Следящий электропривод состоит из первого сумматора 1, регулятора 2 скорости, первого корректирующего устройства 3, второго сумматора 4, формирователя 5 гармонических сигналов, преобразователя 6 координат, вычислителя 7 фазных ЭДС, второго - четвертого корректирующих устройств 8-10, ограничителей 11-13 сигналов, сумматоров 14- 16, трехфазного усилителя 17 мощности, трехфазного асинхронного двигателя 18. Цель изобретения достигается за счет исключения датчиков тока и введения первого, второго и третьего ограничителей сигналов, третьего, четвертого и пятого сумматоров. 1 ил. 5S 05 05 оэ |вк4 со ю
| Булгаков А.,А | |||
| Частотное управление асинхронными электродвигателями | |||
| М.: Энергоиздат, 1982, с | |||
| Питательное приспособление к трепальным машинам для лубовых растений | 1922 |
|
SU201A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Энштейн И | |||
| И. | |||
| Автоматизированный электропривод переменного тока | |||
| М.: Энергоиздат, 1982, с | |||
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
