Изобретение относится к машиностроению, а именно к кривошипно-пбл- зунным механизмам с остановками, и найдет применение, в частности, в автоматических и робототехнических устройствах с регулировкой времени выстоя ведомого звена.
Цель изобретения - расширение кинематических возможностей механизма за счет изменения траектории движения ведомого звена и расширения диапазона регулировки времени выстоя его.
На чертеже показана кинематическая схема механизма.
Механизм содержит стойку 1, шар- нирно связанную с нею плиту 2 с прямолинейной направляющей 3 и ведомое звено в виде ползуна 4, установленного в направляющей Зо Два кривошипа в виде V-образных звеньев 5, 6 и 7, 8 шарнирно связаны первый со стойкой 1 через шарнир 9, а второй с ползуном 4 через шарнир 10. Углы oi и л между звеньями 5, 6 и 7, 8 V-образных кривошипов регулируются тендерами 11 и 12, концы которых шарнирно связаны соответственно со звеньями 5, 6 и 7, 8. Величины углов d я контролируются по шкалам 13 и 14, Концы звеньев 5, 6 и 7,8 связаны между собой накрест лежащими рычагами 15 и 16 через сферические шарниры 17, 18 и 19,20.
Ось шарнира 21, связывающего плиту 2 со стойкой 1 в положении выстоя совмещена с осью шарнира 10, связывающего звенья 7 и 8 V-образного кривошипа с ползуном 4. Для регулировки величины угла поворота плиты 2 и фиксации ее в требуемом положении служит тендер 22, шарнирно связанный одним концом со стойкой 1, а другим - с плитой 2. Для контроля величины угла -f служит шкала 23.
Механизм работает следующим образом.
При вращении звеньев 5 и 6 ведущего V-образного кривошипа и при определенном значении углов о( и л ось
вращения звеньев 7 и 8 второго V-образного кривошипа, а с нею и ползун 4 неподвижны в некотором диапазоне угла поворота звеньев 5 и 6. При дальнейшем повороте звеньев 5 и 6
ползун 4 совершает по направляющей
3возвратно-поступательное движение. Регулировкой соотношения углов о
и /i продолжительность выстоя ползуна
4регулируется в пределах угла пово- рота звеньев 5 и 6 от О до 220°.
Регулировку длины хода ползуна 4 при любом значении угла выстоя производят за счет изменения угла наклона плиты 2 к плоскости стойки
1 с помощью тендера 22. Для этого сначала поворотом звеньев 5 и ,6 приводят механизм в положение выстоя, когда оси шарниров 10 и 21 совмещены, а затем производят регулировку
величины угла .
Формула и з о бретения
Рычажный механизм с выстоем, содержащий стойку, прямолинейные направляющие, установленный в них ползун, два V-образных кривошипа с устройствами для регулировки времени
выстоя, установленные один на стойке, а второй на ползуне, и два накрест лежащих рычага, шарнирно соединяющих V-образные кривошипы между собой, отличающийся
тем, что, с целью расширения кинематических возможностей, шарниры,
связывающие накрест лежащие рычаги с концами V-образньгх кривошипов, выполнены сферическими, механизм снаб- жен плитой, шарнирно связанной со стойкой и установленной с возможностью установочного поворота, а направляющие ползуна выполнены в плите.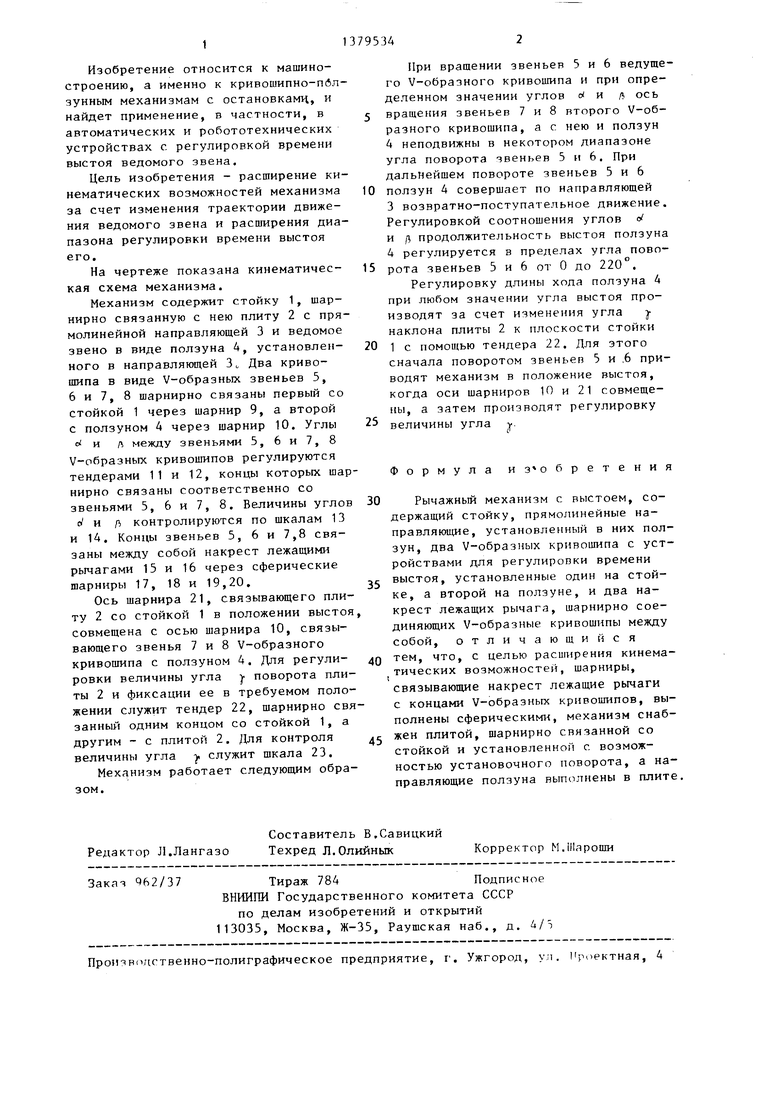
| название | год | авторы | номер документа |
|---|---|---|---|
| Шарнирно-рычажный механизм | 1981 |
|
SU991095A1 |
| Рычажный механизм с выстоем | 1978 |
|
SU670761A1 |
| КРИВОШИПНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМИ ОСТАНОВКАМИ | 2005 |
|
RU2283446C1 |
| РЫЧАЖНЫЙ МЕХАНИЗМ В.И. ПОЖБЕЛКО С ТОЧНЫМ ДЛИТЕЛЬНЫМ ВЫСТОЕМ | 2023 |
|
RU2836248C1 |
| СПОСОБ И УСТРОЙСТВО РЕГУЛИРОВАНИЯ УГЛА ВЫСТОЯ ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 2005 |
|
RU2285168C1 |
| Зубчато-рычажный механизм | 1990 |
|
SU1805258A1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ КОЛЕБАНИЙ ВЫХОДНОГО ЗВЕНА КУЛАЧКОВО-ЗУБЧАТО-РЫЧАЖНОГО МЕХАНИЗМА | 1993 |
|
RU2066858C1 |
| Зубчато-рычажное кулисное устройство с выстоем ведомого звена | 1975 |
|
SU539199A1 |
| Привод составных игл плоской основовязальной машины с двумя игольницами | 1981 |
|
SU1052586A1 |
| Шарнирно-рычажный механизм с двумя выстоями | 1989 |
|
SU1629647A1 |
Изобретение относится к криво- шипно-ползунным механизмам с остановками. Цель изобретения - расширение кинематических возможностей за счет / уизменения траектории движения ведомого звена и расширения диапазона регулировки времени выстоя его. При вращении звеньев 5,6 ведущего V-об- разного кривошипа и при определенном значении углов о/ и л ось вращения звеньев 7,8 второго V-образного кривошипа, а с нею и ползун 4 неподвижны в некотором диапазоне угла поворота звеньев 5,6 При их дапьнейшем повороте ползун 4 совершает по на- правляющей 3 возвратно-поступательное движение. Соотношение углов с( и /i регулируют тендерами 11 и 12, а угол у и вместе с ним величину хода ползуна 4 - тендером 22. 1 ил. S 77 74 (Л ф 00 со ел со 
| Рычажный механизм с выстоем | 1978 |
|
SU670761A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
