I 31
со
vj
со
О)
ние установлены на корпусе с возможностью поворота и фиксации относительно зубцов третьего венца, что позволяет регулировать начальные зазоры между ними и тем самым регулировать чувствительность и линейность характеристики преобразования. В корпусе 1 вьтолнен кольцевой выступ, по
обе стороны Of которого размещены две катушки 3 и 4 индуктивности, прижатые к нему с помощью ферромагнитных шайб 5 и 6, Индуктивность катушек изменяется при повороте подвижного зубчатого венца 8 относительно зубчатых венцов 7 и 9. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный электромеханический преобразователь | 1985 |
|
SU1312697A1 |
| ДАТЧИК УГЛОВОГО ПОЛОЖЕНИЯ ВАЛА | 2000 |
|
RU2180096C2 |
| Преобразователь углового положения вала в фазу | 1983 |
|
SU1091203A1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2000 |
|
RU2197712C2 |
| ИНЕРЦИОННЫЕ ДВИГАТЕЛЬ КОМБИНИРОВАННЫЙ, ЭЛЕКТРОДВИГАТЕЛЬ И ПРЕОБРАЗОВАТЕЛЬ | 1998 |
|
RU2156870C2 |
| Преобразователь линейных ускорений | 1990 |
|
SU1774270A1 |
| Датчик угловой скорости вращения вала | 1976 |
|
SU607144A1 |
| Дифференциальный индуктивный датчик угловых перемещений | 1987 |
|
SU1420354A1 |
| МАГНИТНАЯ ОПОРА ВЕРТИКАЛЬНОГО РОТОРА | 2006 |
|
RU2328348C1 |
| Суммирующий индукционный топливомер-расходомер | 2023 |
|
RU2807439C1 |
Изобретение относится к измерительной технике и имеет целью повышение чувствительности индуктивного преобразователя в диапазоне малых угловых перемещений и ко ррекцию нелинейности его характеристики преобразования. Преобразователь содержит цилиндрический ферромагнитный корпус 1, в котором размещены соосно три ферромагнитных зубчатых венца 7, 8 и 9, два из которых (7 и 9) закреплены на корпусе, а третий (8) закреплен на диамагнитном роторе 10 и имеет оппозит- но выступающие зубцы, расположенные между зубцами венцов 7и 9. Послед о (Л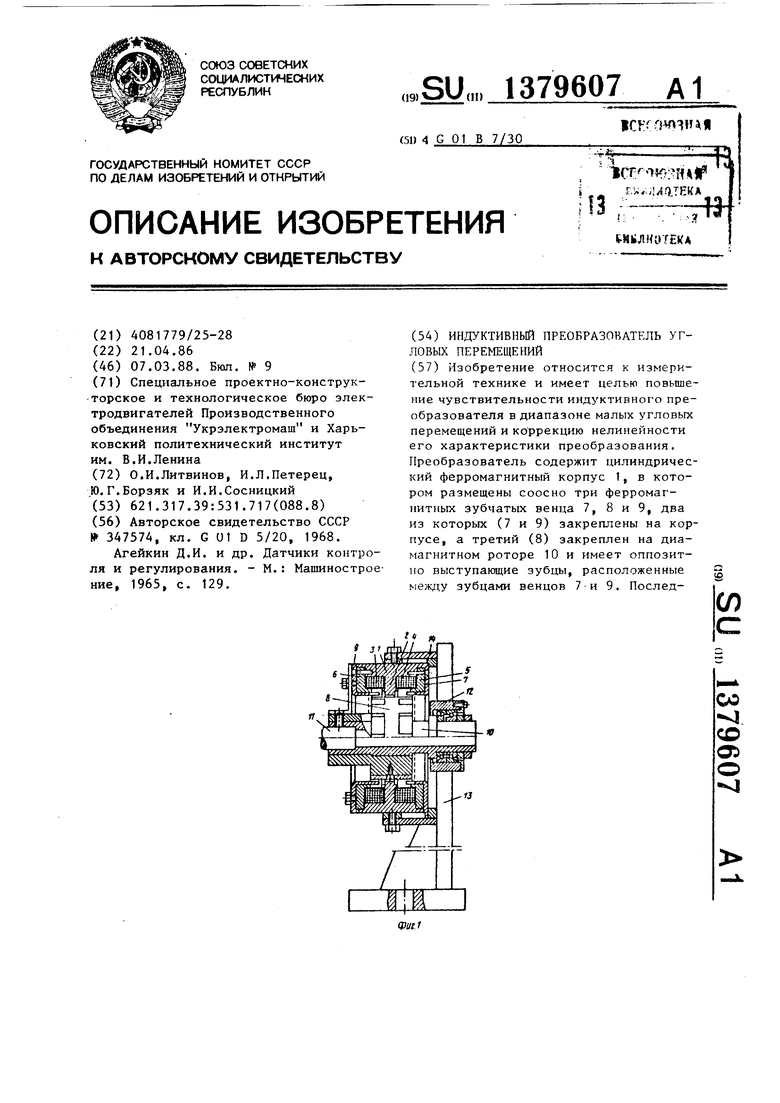
1
Изобретение относится к измерительной технике и может быть использовано для измерения малых угловых перемещений объектов.
Цель изобретения - повьппение чувствительности в диапазоне малых угловых перемещений и коррекция нелинейности характеристики преобразования путем согласования ширины рабочего зазора и диапазона измеряемых перемещений.
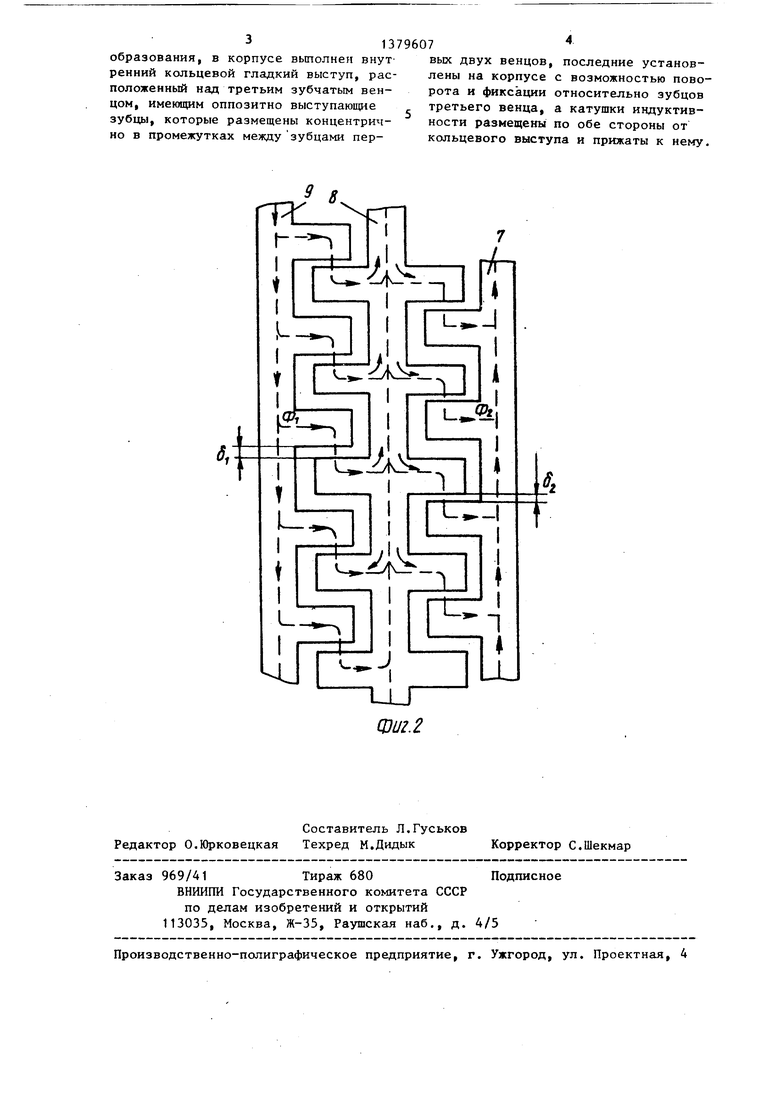
На фиг. 1 представлен предлагаемый преобразователь общий вид; на фиг. 2 - расположение зубцов ферромагнитных ве нцов (в развертке) и пути магнитных потоков через них.
Индуктивный преобразователь угловых перемещений содержит цилиндрический ферромагнитный корпус 1 с внутренним кольцевым гладким выступом 2. По обе стороны выступа 2 размещены катушки 3 и 4 индуктивности, поджатые к нему с помощью прижимных ферромагнитных шайб 5 и 6 и включенные, например, в мостовую измерительную схему (не показана). В корпусе 1 размещены три соосно расположенных ферромагнитных зубцатых венца 7-9. Крайние венцы 7 и 9 закреплены непосредственно на корпусе 1 с возможностью поворота на заданный угол, отсчитываемый по индикаторным меткам на закрепленной на корпусе 1 шкале (не показана), и фиксации их в требуемом положении. Зубцы крайних венцов 7 и 9 охватывают оппозитно выступающие зубцы среднего венца 8 (фиг. 2), который закреплен на выполненном из диамагнитного материала роторе 10, связываемом в процессе измерений с объектом 11 контроля путем его консольного закрепления на
подшипниковой, опоре 12, размещенной на стойке 13, Корпус 1 преобразователя закреплен на той же стойке 13 в цилиндрической направляющей 14.
5 Преобразователь работает следующим образом.
Поворот объекта 11 контроля вызывает поворот ротора 10 и зубчатого венца 8, что приводит к изменению
О ширины зазоров с/, и (f между зубцами венцов 7-9. Последнее вызывает изменение величины магнитных сопротивлений для магнитных потоков Ф, и «, возбуждаемых катушками 3 и 4 индуктив ности. В результате изменяется полное сопротивление этих катушек, что измеряется с помощью мостовой измерительной схемы. Поворотом зубчатых венцов 7 и 9 относительно зубцов вен ца 8 ротора перед проведением измерений обеспечивается выбор оптимального соотношения начальных зазоров между зубцами этих венцов в соответствии с заданным диапазоном угловых перемещений, что позволяет корректировать нелинейность характеристики преобразования и регулировать чувствительность преобразователя.
Формула изобретения Индуктивный преобразователь угловых перемещений, содержащий ферромагнитный корпус, установленные в нем диамагнитный ротор и два соосных фер5 ромагнитных зубчатых венца, закрепленный на роторе третий зубчатый венец и расположенные в корпусе две катушки индуктивности, отличающийся тем, что, с целью повы0 шения чувствительности в диапазоне малых угловых перемещений и коррекции нелинейности характеристики пре5
образования, в корпусе выполнен внут ренний кольцевой гладкий выступ, расположенный над третьим зубчатым венцом, имеющим оппозитно выступающие зубцы, которые размещены концентрич- но в промежутках между зубцами первых двух венцов, последние установлены на корпусе с возможностью поворота и фиксации относительно зубцов третьего венца, а катушки индуктивности размещены по обе стороны от кольцевого выступа и прижаты к нему.
L-U
Фи2.2
| МОМЕНТНЫЙ ЭЛЕКТРОМАГНИТ РЕАКТИВНОГО ТИПА | 0 |
|
SU347574A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Агейкин Д.И | |||
| и др | |||
| Датчики контроля и регулирования | |||
| - М.: Машинострое ние, 1965, с | |||
| Способ применения резонанс конденсатора, подключенного известным уже образом параллельно к обмотке трансформатора, дающего напряжение на анод генераторных ламп | 1922 |
|
SU129A1 |
