uiTOK 5, плиту 6, проушину 7, винт 8 паз 9, pajniK 10, пружину 11, фллпеп 12 с гнездами 13, рычаг 14 с пальцами 15. соответствуюи1ими гнездам 13. Коип.ы пальцев 15 связаны пружинами 16 и 17 соответстненно с корпусом I и плитой 6. На П.ГИП р 6 щарнирно закреплена рамка 18, поджатая к ней пружиной 19 п снабжепная перемычкой 20, контпктирую1де11 с нмстуном 21 и рукояткой 22. При оипрании выступа 21 па перемычку 20 рамки 18 рычаг 14, флапеп 12 с осью 2 и эксцентриком 3 ггонернуть н направ1тен1Н1 по часовотг CTiieJiKe. В таком полоч;ении захват наводят ил кромку изделия и переме1 1ают вниз. При этом njniTa Ь опускается па корпус 1. Рамку 18 за рукоятку 22 отгзодят от корпуса 1, и ycTpoiiCTiio начинают поднимать. После ирохожде1п-1я перем1;1чки 20 MnNio ohic cyria 21 ia--f cy
18 отпускают. Когда усилие пружины 17 превысит уси.пие иружины 16, рг.гчаг 14 попериется в направлении против часово11 стрелки. Вместе с ним повернется фланец 12 с осью 2 и эксцентриком 3. Изде.лие подожмется к стенке корпуса захвата. В момент упора плиты 6 в верхний буртик штока 5 корпус 1 , а с нпм и изде.лие начнут переме- 11;ат1,ся .lUK px. После соприкосновения изде,1П1я с онорной поверхностью плита 6 с рамкой 18 переместятся вниз, рукоятка 22 коснется рычага 14 и он FiMec i e с г шанцем 12, осью 2 и эксцен 15ИКОИ 3 повернетс;я в направлении по часовой стрелке. После касания или- п i;cipnyca 1 рамка 18 повернется п псмк мычка 20 счч;)1;ется ниже выступа 21. i lt /i;;i,y изделием и эксцентриком 3 об ;;зуется зазор. Изделие освобож- ,;;,.: е :ч п ог захвата. 3 и.ч.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1987 |
|
SU1463685A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Приспособление для крепления листовых материалов и занавесок | 1989 |
|
SU1621860A1 |
| Захватное устройство | 1982 |
|
SU1105445A1 |
| СПОСОБ СКРЕПЛЕНИЯ ПО ТОРЦУ ФЛАНЦЕВ СОСУДОВ, НАПРИМЕР КРОВЕНОСНЫХ, И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2336037C2 |
| Грузозахватное устройство В.К.Петрова | 1980 |
|
SU950654A1 |
| КЛЕЩИ ДЛЯ ТРУБ, МУФТ И Т.П. | 1925 |
|
SU2815A1 |
| Кромкоформирующий пресс для двусторонней упрочняющей обработки изделий по наклонным краям отверстий | 1981 |
|
SU1271613A1 |
| КОНТАКТНОЕ УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ЖИДКОКРИСТАЛЛИЧЕСКИХ ЭКРАНОВ | 1991 |
|
RU2030850C1 |
| Устройство для фиксации на поддоне формы анкеров | 1982 |
|
SU1090829A1 |
Изобретение относится к захватным устройствам, в частности к эксцентриковым захватам для листовых изделий. Цель изобретения - повышение удобства в эксплуатации путем автоматизации процесса освобождения изделия. Эксцентриковый захват для листовых изделий содержит П-образный корпус 1, ось 2, эксцентрик 3, зев 4, сл 00 00 СП СХ)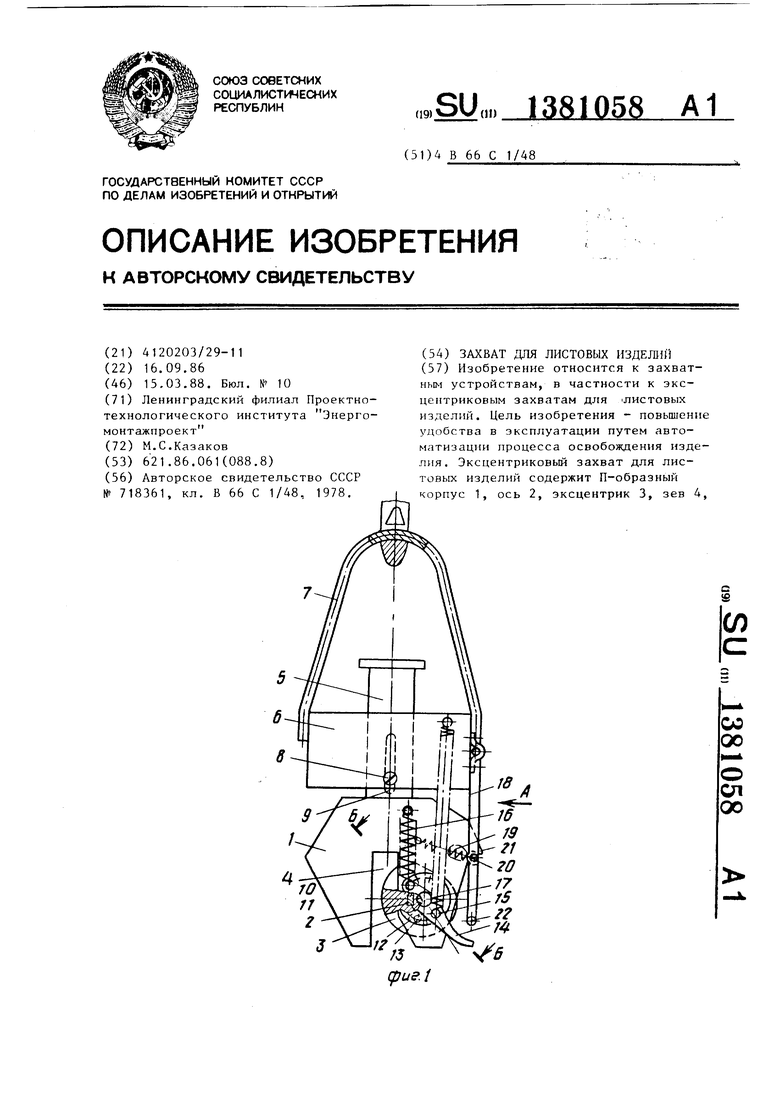
1
Изобретение отпосится к no.nijCMno- транспортиому ооорудова1П1ю, и частности iv для .листовых изде- jniii.
Цель изобретения - пов пиепие удобства н эксплуатации путем автоматизации процесса освобождения из;1елия.
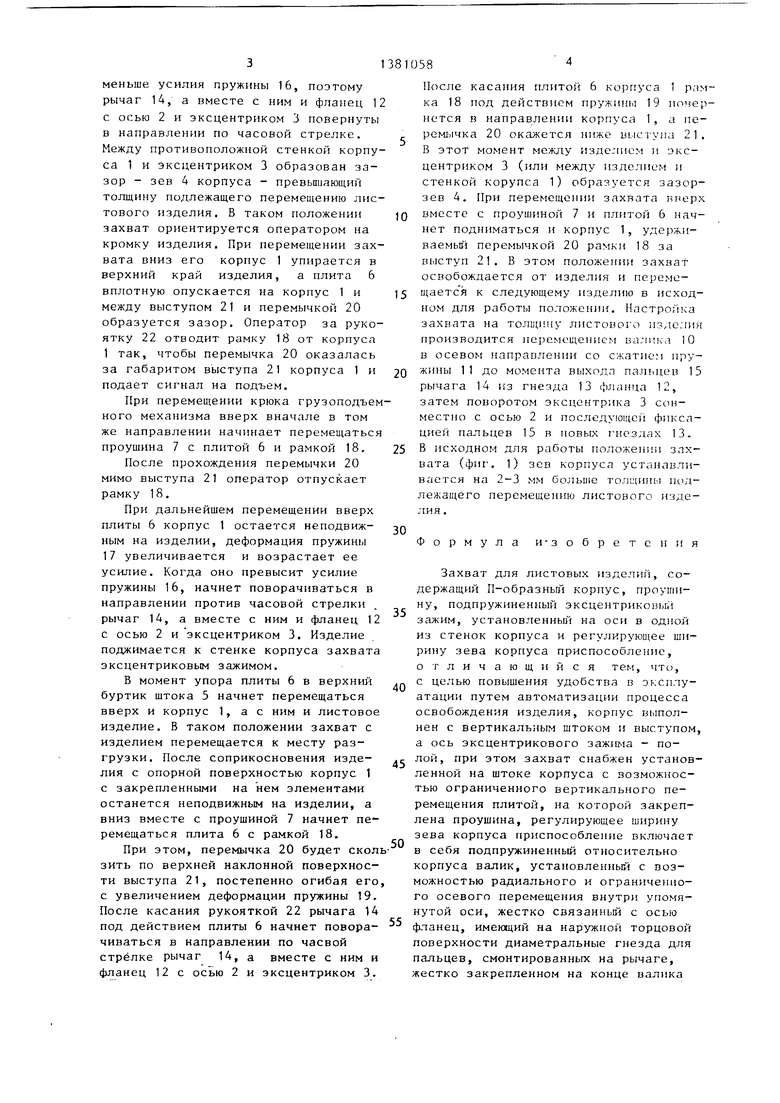
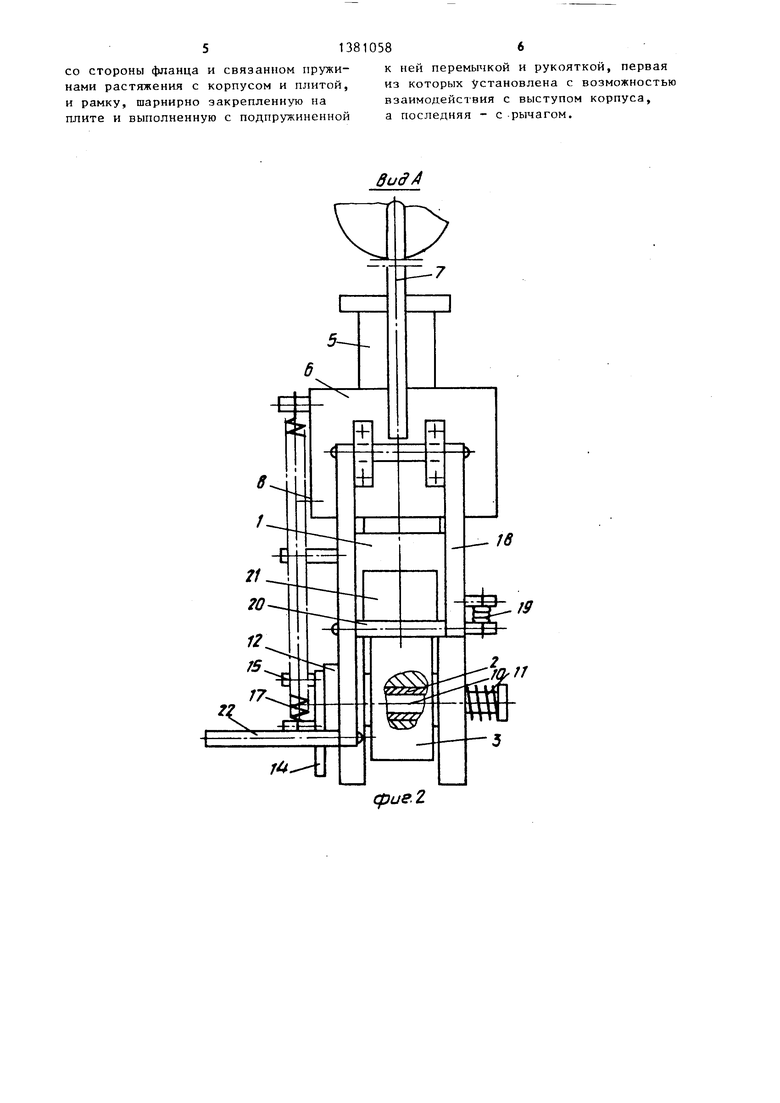
На фиг. 1 схематически изображено устройство, общиГ вид, на . 2 - вид А па фиг. 1, на фиг, 3 - разрез Б-Б на фиг. 1 .
Захват д,г(я ЛИСТОБЫХ издeJПIii со--, держит П-образтп,Ц корпус 1 , в котором на оси 2 неподдиокно отпосительно нее закреплен эксцептрпк 3 с возможностью нео рапиченного радиал1 ного перемещения, регулируемые ширину зева 4 корпуса 1 элементы.
Корпус 1 снабжен вертикально fiac- положенным штоком 5, на котором с возможностью ограниченного вертикального перемещения установле1 а плита 6 с проушиной 7 в верхней части. Винт В на runiTe 6 и продс льный паз 9 на штоке 5 исключают радиальное перемещение плиты 6 относительнс) штока 5.
Регулируемые ширину зева 4 элементы выполнены в виде валика 10,смонгп1)|1Ба1П1ого ппутр оси 2 с возмож- luicTbii) рал,иального и ограниченног о oceiioro с пре(здолением усилия пружины 11 перемещения относительно нее, Иа конце оси 2 жестко закреплен фланец 12, снабжепныг диаг штрально расположенными на наружной торцовой пове 5хностп гнездами 13.
Па конце валика 10 внлотную к фланцу 12 закреплен рь;чаг 14, снаб- женны; двумя, соответствующими гнездами 13 пальцами 15.
Ко1пды пальцев 15 связаны ггружина- ми 16 и 17 соответстве}1но с корпусом 1 и П.ЧИТОЙ 6, На плите 6 шарнирно закреплена рамка 18,, под д;атая к ее боковой поверхности пружиной 19, Рамка 18 снабжена перемычкой 20. контак- тпрующей с выступом 21 корпуса, и рукояткой 22,
Устройство работает следующим образом,
В исходном для работы положении - навешанном на крюк грузозахватного механизма за проушину 7 - корпус 1 удерживается вб1шзи пл1ггы 6 благодаря оппрапию выступа 21 на перемычку 20 рамки 18, В этом случае усилие менее деформированной иружины 17
меньше усилия пружины 16, поэтому рычаг 14, а вместе с ним и фланец 12 с осью 2 и эксцентриком 3 повернуты Б направлении по часовой стрелке. Между противоположной стенкой корпуса 1 и эксцентриком 3 образован зазор - зев 4 корпуса - превьпиающий толщину подлежащего перемещению листового изделия, В таком положении захват ориентируется оператором на кромку изделия. При перемещении захвата вниз его корпус 1 упирается в верхний край изделия, а плита 6 вплотную опускается на корпус 1 и между выступом 21 и перемычкой 20 образуется зазор. Оператор за рукоятку 22 отводит рамку 18 от корпуса 1 так, чтобы перемычка 20 оказалась за габаритом выступа 21 корпуса 1 и подает сигнал на подъем.
При перемещении крюка грузоподъемного механизма вверх вначале в том же направлении начинает перемещаться проушина 7 с плитой 6 и рамкой 18,
После прохождения перемычки 20 мимо выступа 21 оператор отпускает рамку 18.
При дальнейшем перемещении вверх плиты 6 корпус 1 остается неподвиж- ным на изделии, деформация пружины 17 увеличивается и возрастает ее усилие. Когда оно превысит усилие пружины 16, начнет поворачиваться в направлении против часовой стрелки рычаг 14, а вместе с ним и фланец 12 с осью 2 и эксцентриком 3. Изделие поджимается к стенке корпуса захвата эксцентриковым зажимом.
В момент упора плиты 6 в верхний буртик штока 5 начнет перемещаться вверх и корпус 1, а с ним и листовое изделие. В таком положении захват с изделием перемещается к месту разгрузки. После соприкосновения иэде- ЛИЯ с опорной поверхностью корпус 1 с закрепленными на нем элементами останется неподвижным на изделии, а вниз вместе с проушиной 7 начнет перемещаться плита 6 с рамкой 18.
При этом, перемычка 20 будет скол зить по верхней наклонной поверхности выступа 21, постепенно огибая его с увеличением деформации пружины 19, После касания рукояткой 22 рычага 14 под действием плиты 6 начнет повора- чиваться в направлении по чаевой стрелке рычаг 14, а вместе с ним и фланец 12 с осью 2 и эксцентриком 3,
Q 5 0
5
Q
„ с
0
После касания плитой 6 корпуса 1 рамка 18 под действием пружины 19 почер- нется в направлении корпуса 1, а перемычка 20 окажется ниже выступа 21. В этот момент между изделием и эксцентриком 3 (или между изделием и стенкой корупса 1) образуется зазор- зев 4. При перемещении захвата виерх вместе с проушиной 7 и плитой 6 начнет подниматься и корпус 1, удержи- ваемьп перемычкой 20 рамки 18 за выступ 21. В этом положении захват освобождается от изделия и перемещается к следующему изделию в исходном для работы положении. Настро;1ка захвата на толщину листового изделия производится перемещением валшсл 10 в oceBON напрагзлении со сжатием пружины 11 до момента выхода пальцен 15 рычага 14 из гнезда 13 фланца 12, затем поворотом эксцентрика 3 сс в- местно с осью 2 и последующе фиксацией пальцев 15 в повьк гнездах 13. В исходном для работы положении захвата (фиг. 1) зев корпуса устанавливается на 2-3 мм больше TOJicuiHhi подлежащего перемещению листового изделия .
Формула И зобретения
Захват для листовых изделий, содержащий П-образный корпус, проушину, подпружиненный эксцентриковый зажим, установленньп на оси в одной из стенок корпуса и регулируюи|ее ширину зева корпуса приспособление, отличающийся тем, что, с целью повышения удобства в эксплуатации путем автоматизации процесса освобождения изделия, корпус выполнен с вертикальным щтоком и выступом, а ось эксцентрикового зажима - полой, при этом захват снабжен установленной на штоке корпуса с возможностью ограниченного вертикального перемещения плитой, на которой закреплена проушина, регулирующее ширину зева корпуса приспособление включает в себя подпружиненный относительно корпуса валик, установленные с возможностью радиального и ограниченного осевого перемещения внутри упомянутой оси, жестко связанный с осью фланец, имеющий на наружной торцовой поверхности диаметральные гнезда для пальцев, смонтированных на рычаге, жестко закрепленном на конце валика
513810586
со стороны фланца и связанном прутки- к ней перемычкой и рукояткой, первая нами растяжения с корпусом и плитой, из которых установлена с возможностью и рамку, шарнирно закрепленную на взаимодействия с выступом корпуса, плите и выполненную с подпружиненной а последняя - с -рычагом.
Buff
срие.2
6 6rro epf yfTrff
ераеЗ
| Эксцентриковый захват для листовых изделий | 1978 |
|
SU718361A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
