(Относительно него благодаря паам 15, в которые выступают паль- libi 16 двуплечего рычага 11, связанные с последним пружинами.17. На плас- 13 жестко закреплена проушина 18 для присоединения к грузозахватному механизму и шарнирно смонтиро1463685
вана на оси 19 рамка 20 с рукояткой 21, связанная с магнитопроводами пружиной 22. Изобретение обеспечивает возможность поштучного отделения листового проката от пачки и перемещение его к месту технологической обработки. 15 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват | 1988 |
|
SU1643401A1 |
| Захват для листовых изделий | 1986 |
|
SU1381058A1 |
| Захват | 1985 |
|
SU1289793A1 |
| Швейный полуавтомат для выполнения коротких строчек | 1976 |
|
SU616351A1 |
| Чертежный прибор а.п.четверткова | 1974 |
|
SU662378A1 |
| Реверсивный храповой механизм | 1977 |
|
SU771389A1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ДЕТАЛЕЙ | 2000 |
|
RU2212966C2 |
| Аппарат выключки матрично-клиновых строк в наборной строкоотливной машине | 1982 |
|
SU1100133A1 |
| Уточный контролер для бесчелночного ткацкого станка | 1988 |
|
SU1601234A1 |
| Устройство для гибки деталей | 1985 |
|
SU1360849A2 |
Изобретение относится к транспортному машиностроению и применяется при поштучном отделении листов от пачки проката. Цель изобретения - расширение эксплуатационных возможностей путем обеспечения кантования груза. Захват содержит боковые маг10 23 нитопроводы 1, скругленные со стороны оси А. Боковые магнитопроводы вьшолнены с .зубом 8 и Г-образ- ным выступом 9, перпендикулярным к контактируемой с перемещаемым листовым прокатом стороне магнитопро- водов, а с противоположной стороны - с выступрм 10 со скосом к середине магнитопроводов. Элемент для присоединения к грузоподъемному механизму вьтолнен в виде двуплечего рычага 11, на одном конце которого - ближнем к N магнитам 2 - шарнирно установлена подпружиненная пластина 13 с зубом 14 для зацепления с зубом 8 магнитопроводов. Пластина 13 подпружинена относительно двуплечего рычага 11 и имеет возможность ограниченного перемещения f5 IS п (Л с 13 4 О со О5 00 ел 
1
Изобретение относится к транспортному машиностроению и касается зах- иатов для поштучного отделения лис- тов от пачки проката.
Цель изобретения - раскирение экс- плуатагщонных возможностей путем обеспечения кантования груза.
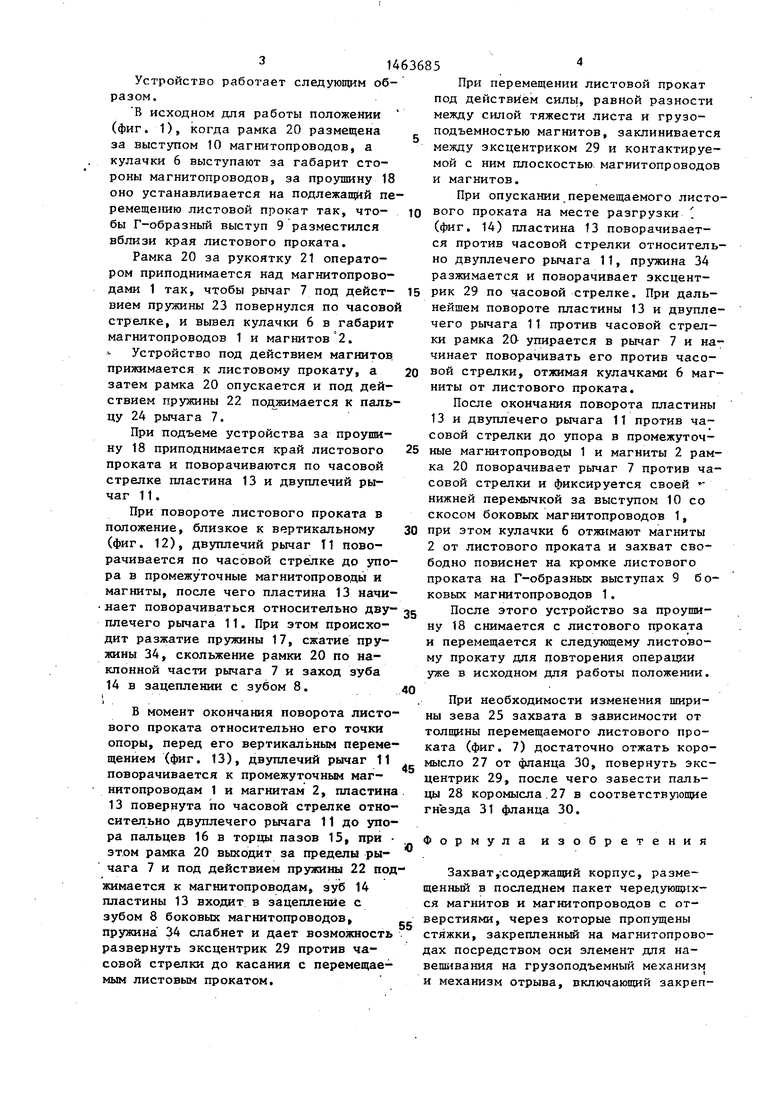
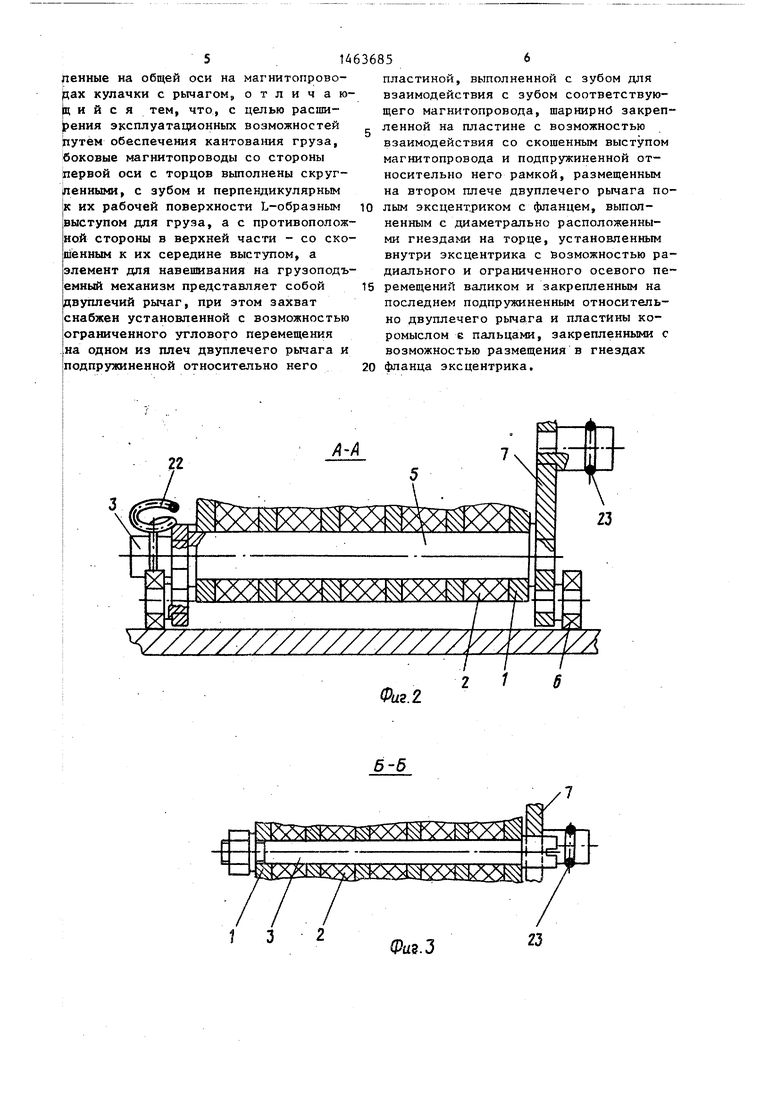
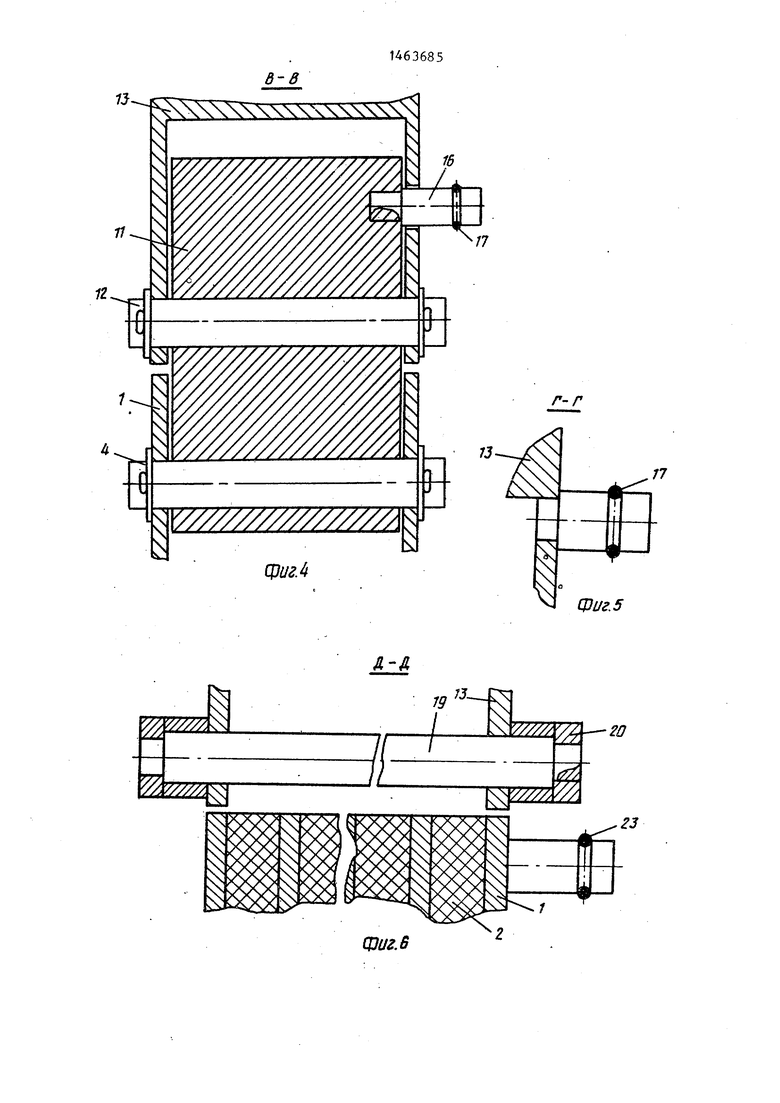
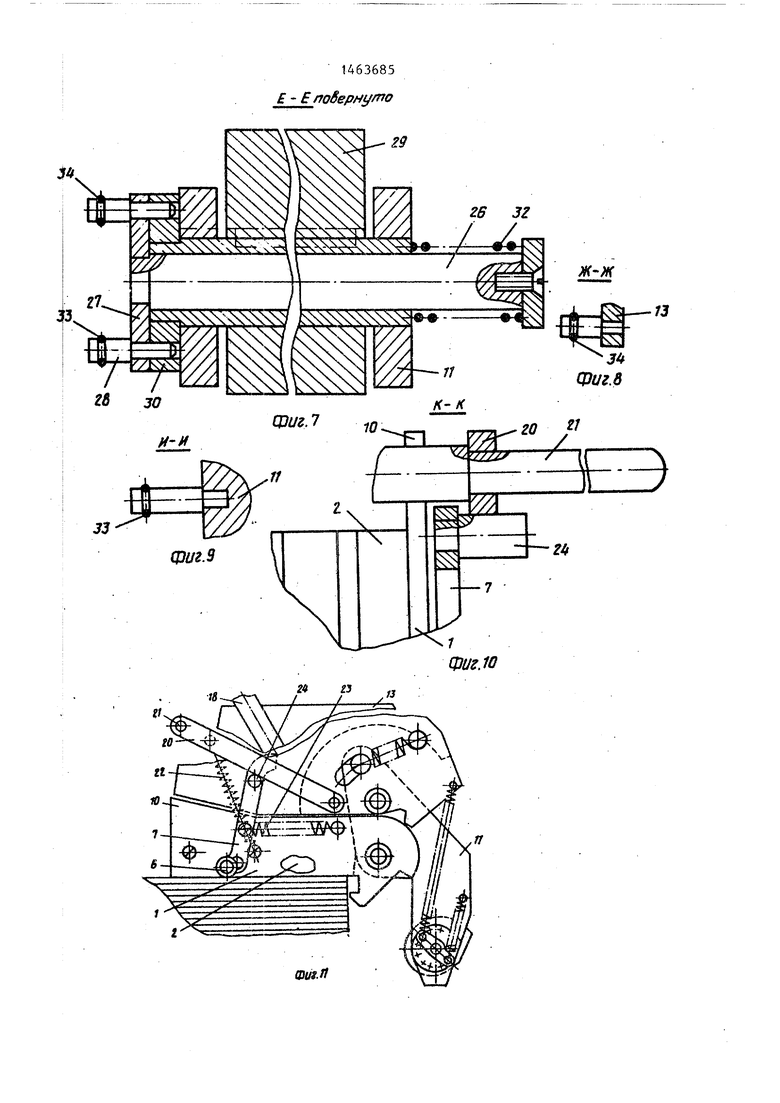
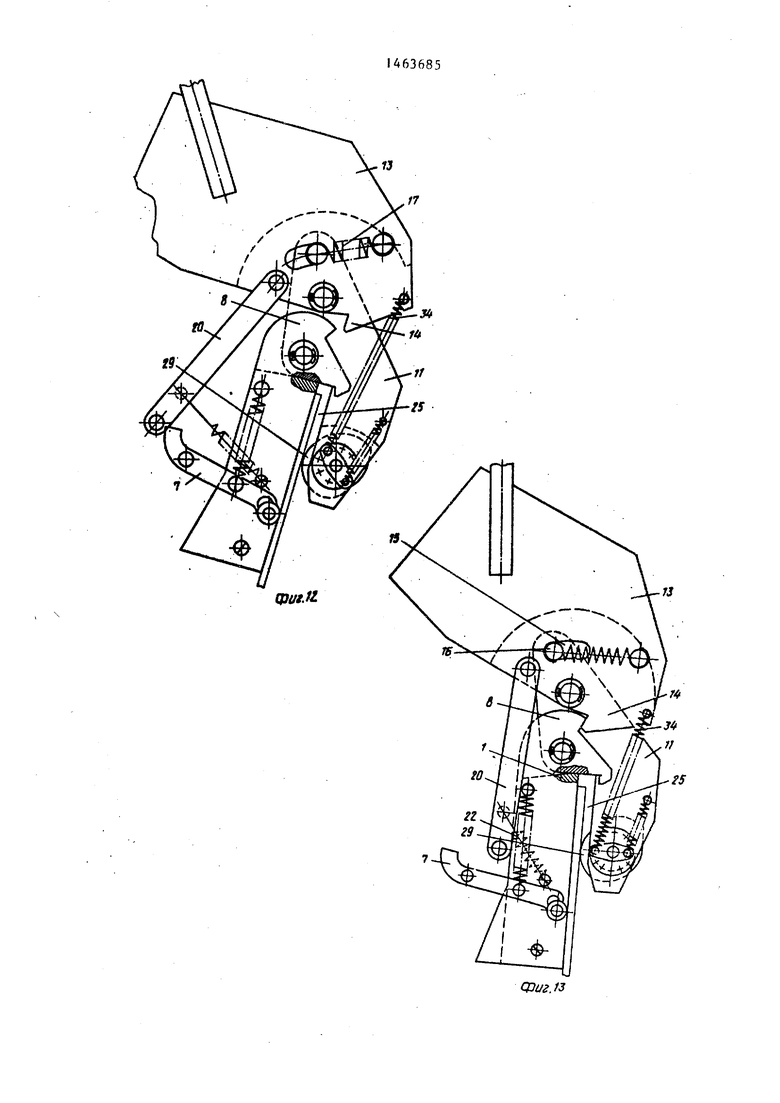
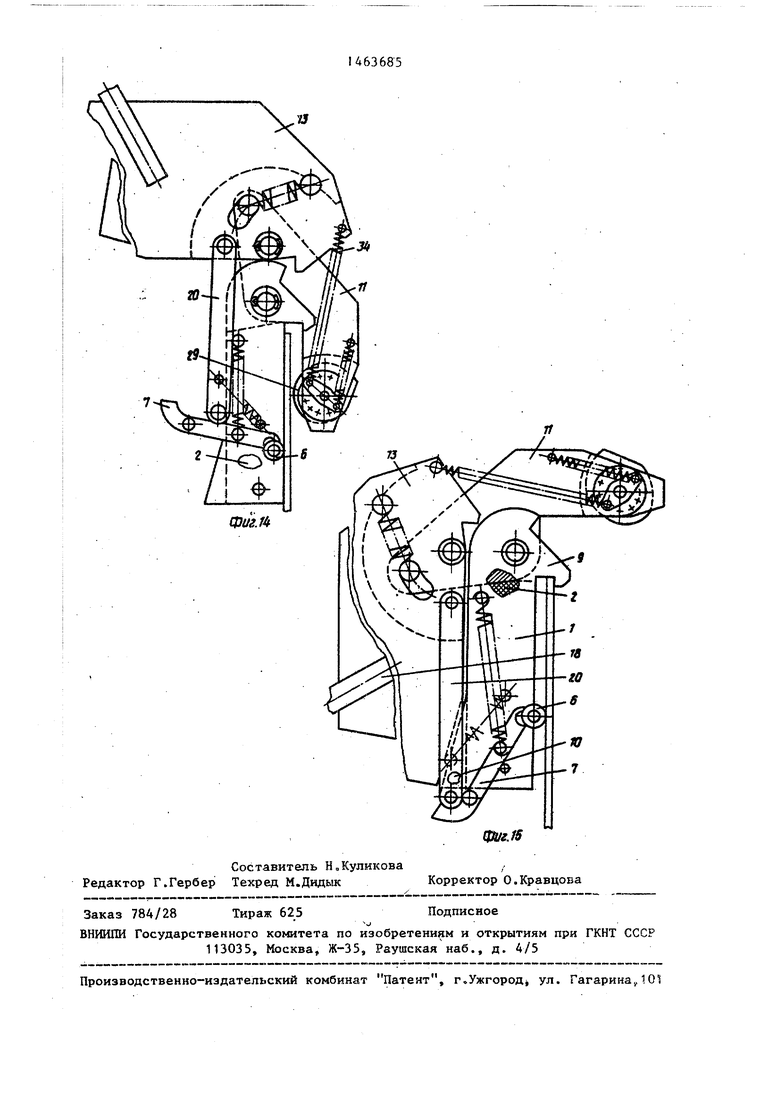
На фиг. 1 схематически изображено предлагаемое устройство, общий вид-, яа фиг. 2 - разрез А-А на фиг. 1; на (Ьиг. 3 - разрез Б-Б на фнг, 1-,на фиг. ч - разрез В-В на фиг.1; на фиг. 5 - разрез Г-Г на фиг.1; на фиг. 6 - разрез Д-Д на фиг. 1, на фиг. 7 - jiaapes Е-Е на фиг.Т; на фиг.8 -раз- ез Ж-Ж на фиг. 1; на фиг. 9 - разрез И-И на фиг. фиг,10 - разрез С-К на фиг. 1; на фиг. 11 - устройст- ио в момент начала подъема с перемещаемым листовым прокатом; на фиг. 12 - то же в момент, предшествующий эксцентриковому зажиму листового про- хата ) на фиг. 13 - то же, в момент эксцентрикового зажима листового проката , на фиг. 14 - то же, в момент : азмыкания эксцентрикового зажима «а месте разгрузки листового проката; Иа фиг. 15 - то же, в момент освобож- |хения листового проката от устройства И перехода последнего в исходное для захвата следующего листового проката положение.
Захват содержит пакет из чередую- tnHXCH магнитопроводов 1 и магнитов 2, выполненных с отверстиягв-i, в которых установлены стяжки 3. Пакет посредством оси 4 закреплен на элементе для присоединения к грузоподъемному механизму.
На одной стороне пакета установлен механизм отрьюа, который включает жестко закрепленные на оси , выступающей за боковые магнитопроводы 1, кулачки 6, один из которьис снабжен :рьгчагом 7. Боковые магнитопроводы 1 вблизи оси 4 скруглены и снабжены зу
бом В и Г-образным выступом 9, перпендикулярным к контактируемой с перемещаемым листовым прокатом стороне магнитопроводов, а с противоположной стороны - -выступом 10 со скосом.
Элемент для присоединения к грузоподъемному механизму ньшолнен в виде двуплечего рычага 11, на одном конце которого на оси 12 шарнирно установлена пластина 13, имеющая зуб 14, соответствующий зубу 8 магнитопроводов. Пластина 13 подпружинена относительно двуплечего рычага 11 и имеет возможность ограниченного перемещения относительно него благодаря пазам 15, в которые выступают пальцы 16 двуплечего рычага 11, связанные с последним пружинами 17.
На пластине 13 жестко закреплена проушина 18 для. присоединения к грузозахватному механизму и шарнирно смонтирована на оси 19 рамка 20 с рукояткой 21, связанная с магнитопроводами пружиной 22. Рамка 20 имеет возможность контактировать с рычагом 7, связанным с магнитопроводами пружиной 23 и имеющим палец 24, выступаю- шлй под рамкой 20 за ее габарит.
На другом конце двуплечего рычага 11 размещены регулируемые ширину зева 25 элементы в виде валика 26, снабженного коромыслом 27 с пальцами 28. Валик 26 установлен внутри эксцентрика 29 с возможностью радиального и ограниченного осевого перемещения .
Эксцентрик 29 снабжен фланцем 30 с диаметрально расположенными гнездами 31 со стороны коромысла 27, соответствующими положениям пальцев 28.
Коромысло 27 поджато к фланцу 30 пружиной 32 и соединено одним концом посредством пружины 33 с двуплечим рычагом 11, а другим концом посредством пружины 34 - с пластиной 13.
14
Устройство работает следующим об- разом.
В исходном для работы положении (фиг. 1), когда рамка 20 размещена за выступом 10 магнитопроводов, а кулачки 6 выступают за габарит стороны магнитопроводов, за проушину 18 оно устанавливается на подлежащий пе- ремеще1шю листовой прокат так, что- бы Г-образный выступ 9 разместился вблизи края листового проката.
Рамка 20 за рукоятку 21 оператором приподнимается над магнитопрово
При опускании перемещаемого листового проката на месте разгрузки (фиг. 14) пластина 13 поворачивается против часовой стрелки относительно двуплечего рычага 11, пружина 34 разжимается и поворачивает эксцентдами 1 так, чтобы рычаг 7 под деист- 15 рик 29 по часовой стрелке. При дальвием пружины 23 повернулся по часовой стрелке, и вывел кулачки 6 в габарит магнитопроводов 1 и магнитов 2. Устройство под действием магнитов прижимается к листовому прокату, а 20 затем рамка 20 опускается и под действием пружины 22 поджимается к пальцу 24 рычага 7.
При подъеме устройства за проушину 18 приподнимается край листового 25 проката и поворачиваются по часовой стрелке пластина 13 и двуплечий рычаг 11.
При повороте листового проката в положение, близкое к вертикальному 30 (фиг. 12), двуплечий рычаг Т1 поворачивается по часовой стрелке до упора в промежуточные магнитопроводы и магниты, после чего пластина 13 начи- нает поворачиваться относительно дну- « плечего рычага 11. При этом происходит разжатие пружины 17, сжатие пружины 34, скольжение рамки 20 по наклонной части рычага 7 и заход зуба 14 в зацеплении с зубом 8. 40
J . .
В момент окончания поворота листового проката относительно его точки опоры, перед его вертикальным перемещением (фиг. 13), двуплечий рычаг 11 поворачивается к промежуточным маг- нитопроводам 1 и магнитам 2, пластина. 13 повернута по часовой стрелке относительно двуплечего рычага 11 до упора пальцев 16 в торцы пазов 15, при этом рамка 20 выходит за пределы ры- чага 7 и под действием пружины 22 поджимается к магнитопроводам, зуб 14 пластины 13 входит в зацепление с зубом 8 боковых магнитопроводов, пружина 34 слабнет и дает возможность развернуть эксцентрик 29 против часовой стрелки до касания с перемещаемым листовым прокатом.
45
55
нейшем повороте пластины 13 и двуплечего рычага 11 против часовой стрелки рамка 2Q упирается в рычаг 7 и начинает поворачивать его против часовой стрелки, отжимая кулачками 6 магниты от листового проката.
После окончания поворота пластины 13 и двуплечего рычага 11 против часовой стрелки до упора в промежуточные магнитопроводы 1 и магниты 2 рамка 20 поворачивает рычаг 7 против часовой стрелки и фиксируется своей нижней перемычкой за выступом 10 со скосом боковых магнитопроводов 1, при этом кулачки 6 отжимают магниты 2 от листового проката и захват свободно повиснет на кромке листового проката на Г-образных выступах 9 боковых магнитопроводов 1.
После этого устройство за проушину 18 снимается с листового проката и перемещается к следующему листовому прокату для повторения операции уже в исходном для работы положении.
При необходимости изменения ширины зева 25 захвата в зависимости от толщины перемещаемого листового проката (фиг. 7) достаточно отжать коромысло 27 от фланца 30, повернуть эксцентрик 29, после чего завести пальцы 28 коромысла.27 в соответствующие гнезда 31 фланца 30.
Формула изобретения
Захват,-содержащий корпус, размещенный в последнем пакет чередующргх- ся магнитов и магнитопроводов с отверстиями, через которые пропущены стяжки, закрепленный на магнитопрово- дах посредством оси элемент для навешивания на грузоподъемный механизм и механизм отрыва, включающий закрепПри перемещении листовой прокат под действием силы, равной разности между силой тяжести листа и грузоподъемностью магнитов, заклинивается между эксцентриком 29 и контактируе- мой с ним плоскостью, магнитопроводов и магнитов.
При опускании перемещаемого листового проката на месте разгрузки (фиг. 14) пластина 13 поворачивается против часовой стрелки относительно двуплечего рычага 11, пружина 34 разжимается и поворачивает эксцентрик 29 по часовой стрелке. При даль20
25
30 0
5
5
нейшем повороте пластины 13 и двуплечего рычага 11 против часовой стрелки рамка 2Q упирается в рычаг 7 и начинает поворачивать его против часовой стрелки, отжимая кулачками 6 магниты от листового проката.
После окончания поворота пластины 13 и двуплечего рычага 11 против часовой стрелки до упора в промежуточные магнитопроводы 1 и магниты 2 рамка 20 поворачивает рычаг 7 против часовой стрелки и фиксируется своей нижней перемычкой за выступом 10 со скосом боковых магнитопроводов 1, при этом кулачки 6 отжимают магниты 2 от листового проката и захват свободно повиснет на кромке листового проката на Г-образных выступах 9 боковых магнитопроводов 1.
После этого устройство за проушину 18 снимается с листового проката и перемещается к следующему листовому прокату для повторения операции уже в исходном для работы положении.
При необходимости изменения ширины зева 25 захвата в зависимости от толщины перемещаемого листового проката (фиг. 7) достаточно отжать коромысло 27 от фланца 30, повернуть эксцентрик 29, после чего завести пальцы 28 коромысла.27 в соответствующие гнезда 31 фланца 30.
Формула изобретения
Захват,-содержащий корпус, размещенный в последнем пакет чередующргх- ся магнитов и магнитопроводов с отверстиями, через которые пропущены стяжки, закрепленный на магнитопрово- дах посредством оси элемент для навешивания на грузоподъемный механизм и механизм отрыва, включающий закрепПенные на общей оси на магнитопрово- |чах кулачки с рычагом, отличающийся тем, что, с целью расширения эксплуатационных возможностей путём обеспечения кантования груза, боковые магнитопроводы со стороны первой оси с торцов выполнены скруг- {пенными, с зубом и перпендикулярным к их рабочей поверхности Ь-образньп выступом для груза, а с противоположной стороны в верхней части - со скошенным к их середине выступом, а элемент для навешивания на грузоподъемный механизм представляет собой двуплечий рычаг, при этом захват снабжен установленной с возможностью ограниченного углового перемещения на одном из плеч двуплечего рычага и подпружиненной относительно него
///////7//////////У/Х//А
г 1 б
Фиг.2
132
пластиной, выполненной с зубом для взаимодействия с зубом соответствующего магнитопровода, шарнирнб закрепленной на пластине с возможностью
взаимодействия со скошенным выступом
магнитопровода и подпружиненной относительно него рамкой, размещенным на втором плече двуплечего рычага полым эксцентриком с фланцем, выполненным с диаметрально расположенными гнездами на торце, установленным внутри эксцентрика с Возможностью радиального и ограниченного осевого перемещений валиком и закрепленным на последнем подпружиненным относительно двуплечего рычага и пластины коромыслом е пальцами, закрепленными с возможностью размещения в гнездах
фланца эксцентрика.
Фа.З
7J
фиг. 5
03иг, 6
Зи
и-и
ЦЗиг.7 0
J8
Фиг.а
29
-fn
Ш- /
фиг.10
фигЛ
17
13
Фиг. 13
.13
Составитель Н„Куликова Редактор Г.Гербер Техред М.Дидык Корректор О.КравцоБа
Заказ 784/28
Тираж 625
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г.Ужгород ул. Гагарина;, 101
г.15
Подписное
| Захват | 1985 |
|
SU1289793A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
