73
77
4;
4 О
О
оо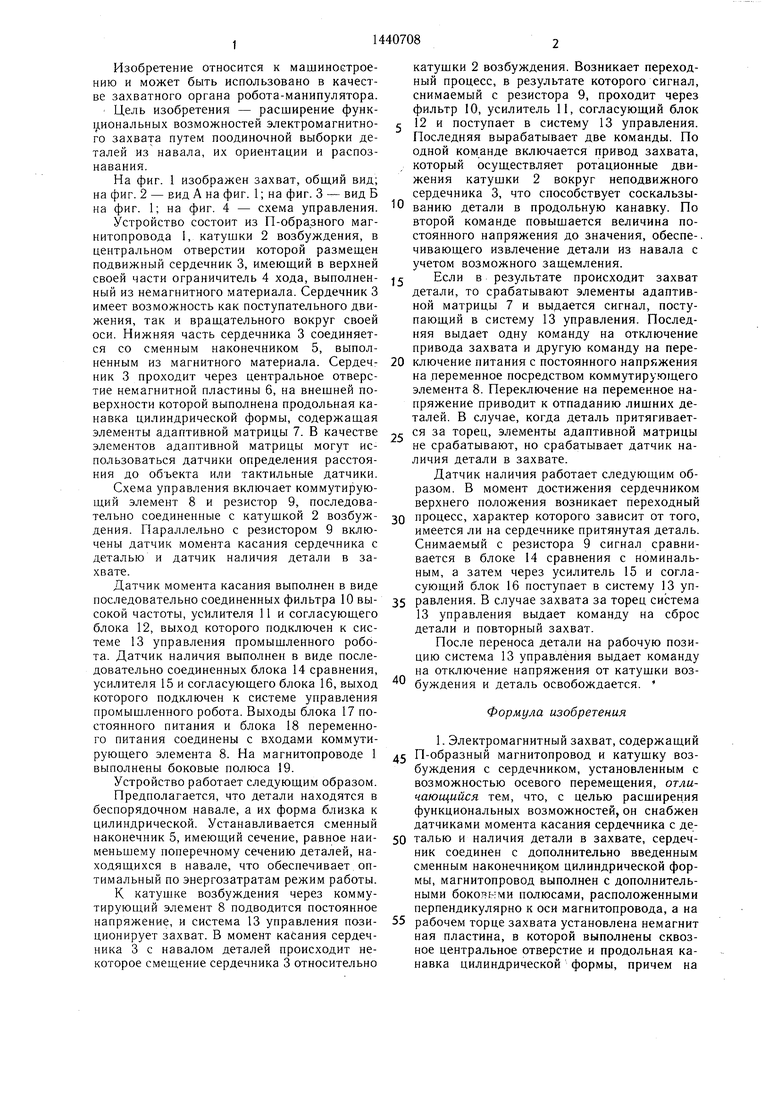
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемный электромагнит | 1986 |
|
SU1435525A1 |
| Электромагнитный захват | 1979 |
|
SU918090A1 |
| Электромагнитный схват | 1991 |
|
SU1815221A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Устройство для размагничивания | 1988 |
|
SU1513531A1 |
| Электромагнитный захват | 1985 |
|
SU1256958A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| Устройство для поштучной выдачи ферромагнитных деталей | 1983 |
|
SU1143572A1 |
| Электромагнитный захватный агрегатный модуль | 2016 |
|
RU2622069C1 |
| МАГНИТНЫЙ ЗАХВАТ МАНИПУЛЯТОРА | 1990 |
|
RU2016757C1 |
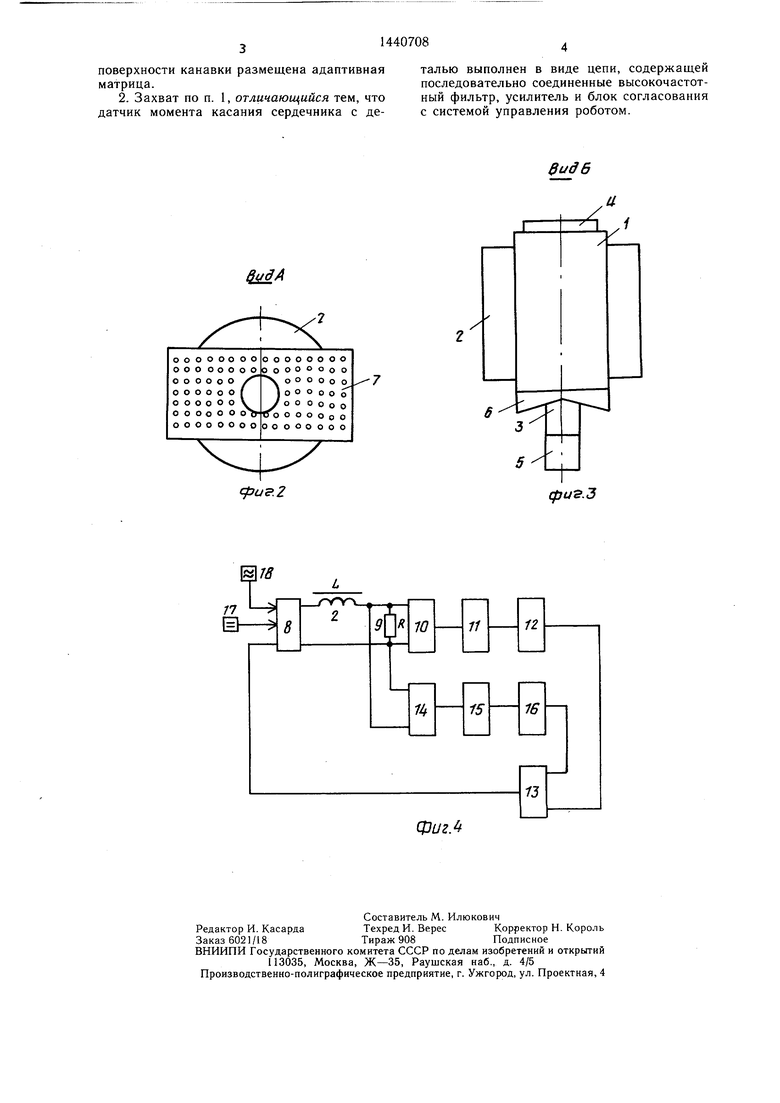
Изобретение относится к машиностроению и может быть использовано в качестве захватного органа робота-манипулятора. Целью изобретения является расширение функциональных возможностей электромагнитного.захвата путем поодиночной выборки деталей из навала, их ориентации и распознавания. Для этого в устройство, содержащее П-образный магнитопровод 1 и катушку возбул дения 2 с подвижным сердечником 3, соединенным с ограничителем хода 4, введена немагнитная пластина 6, на внешней стороне которой выполнена продольная канавка цилиндрической формы с адаптивной матрицей 7, а на сердечнике 3 установлен сменный наконечник 5. Захват снабжен также схемой управления, включающей датчики момента касания сердечника с деталью и наличия детали в захвате. При работе захвата деталь примагничивается к наконечнику 5. Сердечник 3 втягивается в катушку 2 и деталь соскальзывает в продольную канавку. 1. з.п.ф-лы. 4 ил. 4 i (Л
cfu-гЛ
Изобретение относится к машиностроению и может быть использовано в качестве захватного органа робота-манипулятора.
Цель изобретения - расширение функциональных возможностей электромагнитного захвата путем поодиночной выборки деталей из навала, их ориентации и распознавания.
На фиг. 1 изображен захват, обш,ий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - схема управления.
Устройство состоит из П-образного маг- нитопровода I, катушки 2 возбуждения, в центральном отверстии которой размещен подвижный сердечник 3, имеющий в верхней своей части ограничитель 4 хода, выполненный из немагнитного материала. Сердечник 3 имеет возможность как поступательного движения, так и вращательного вокруг своей оси. Нижняя часть сердечника 3 соединяется со сменным наконечником 5, выполненным из магнитного материала. Сердечник 3 проходит через центральное отверстие немагнитной пластины 6, на внешней поверхности которой выполнена продольная канавка цилиндрической формы, содержащая элементы адаптивной матрицы 7. В качестве элементов адаптивной матрицы могут использоваться датчики определения расстояния до объекта или тактильные датчики.
Схема управления включает коммутирующий элемент 8 и резистор 9, последовательно соединенные с катушкой 2 возбуждения. Параллельно с резистором 9 включены датчик момента касания сердечника с деталью и датчик наличия детали в захвате.
Датчик момента касания выполнен в виде последовательно соединенных фильтра 10 высокой частоты, усилителя 11 и согласующего блока 12, выход которого подключен к системе 13 управления промыщленного робота. Датчик наличия выполнен в виде последовательно соединенных блока 14 сравнения, усилителя 15 и согласующего блока 16, выход которого подключен к системе управления промыщленного робота. Выходы блока 17 постоянного питания и блока 18 переменного питания соединены с входами коммутирующего элемента 8. На магнитопроводе 1 выполнены боковые полюса 19.
Устройство работает следующим образом.
Предполагается, что детали находятся в беспорядочном навале, а их форма близка к цилиндрической. Устанавливается сменный наконечник 5, имеющий сечение, равное наименьшему поперечному сечению деталей, на- ходяшихся в навале, что обеспечивает оптимальный по энергозатратам режим работы.
К катушке возбуждения через коммутирующий элемент 8 подводится постоянное напряжение, и система 13 управления позиционирует захват. В момент касания сердечника 3 с навалом деталей происходит некоторое смещение сердечника 3 относительно
катущки 2 возбуждения. Возникает переходный процесс, в результате которого сигнал, снимаемый с резистора 9, проходит через фильтр 10, усилитель 11, согласующий блок 12 и поступает в систему 13 управления. Последняя вырабатывает две команды. По одной команде включается привод захвата, который осуществляет ротационные движения катушки 2 вокруг неподвижного сердечника 3, что способствует соскальзы0 ванию детали в продольную канавку. По второй команде повышается величина постоянного напряжения до значения, обеспе-. чивающего извлечение детали из навала с учетом возможного защемления.
5 Если в результате происходит захват детали, то срабатывают элементы адаптивной матрицы 7 и выдается сигнал, поступающий в систему 13 управления. Последняя выдает одну команду на отключение привода захвата и другую команду на пере0 ключение питания с постоянного напряжения на переменное посредством коммутирующего элемента 8. Переключение на переменное напряжение приводит к отпаданию лищних деталей. В случае, когда деталь притягивает ся за торец, элементы адаптивной матрицы не срабатывают, но срабатывает датчик наличия детали в захвате.
Датчик наличия работает следующим образом. В момент достижения сердечником верхнего положения возникает переходный
0 процесс, характер которого зависит от того, имеется ли на сердечнике притянутая деталь. Снимаемый с резистора 9 сигнал сравнивается в блоке 14 сравнения с номинальным, а затем через усилитель 15 и согласующий блок 16 поступает в систему 13 уп5 равления. В случае захвата за торец система 13 управления выдает команду на сброс детали и повторный захват.
После переноса детали на рабочую позицию система 13 управления выдает команду на отключение напряжения от катушки воз буждения и деталь освобождается.
Формула изобретения
поверхности канавки размещена адаптивная матрица.
талью выполнен в виде цепи, содержащей последовательно соединенные высокочастотный фильтр, усилитель и блок согласования с системой управления роботом.
X
фиЭ.З
фиг.
| Грузоподъемный электромагнит | 1985 |
|
SU1299937A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
