1
Изобретение относится к управлению электрическими машинами и может быть использовано в дискретном приводе с регулированием скорости в широких пределах.
Цель изобретения состоит в расширении функциональных возможностей путем изменения скорости во время движения.
На Лиг. 1 изображена функ11;иональ ная схема устройства; на фиг о 2 - график аппроксимации выходной частоты устройства.
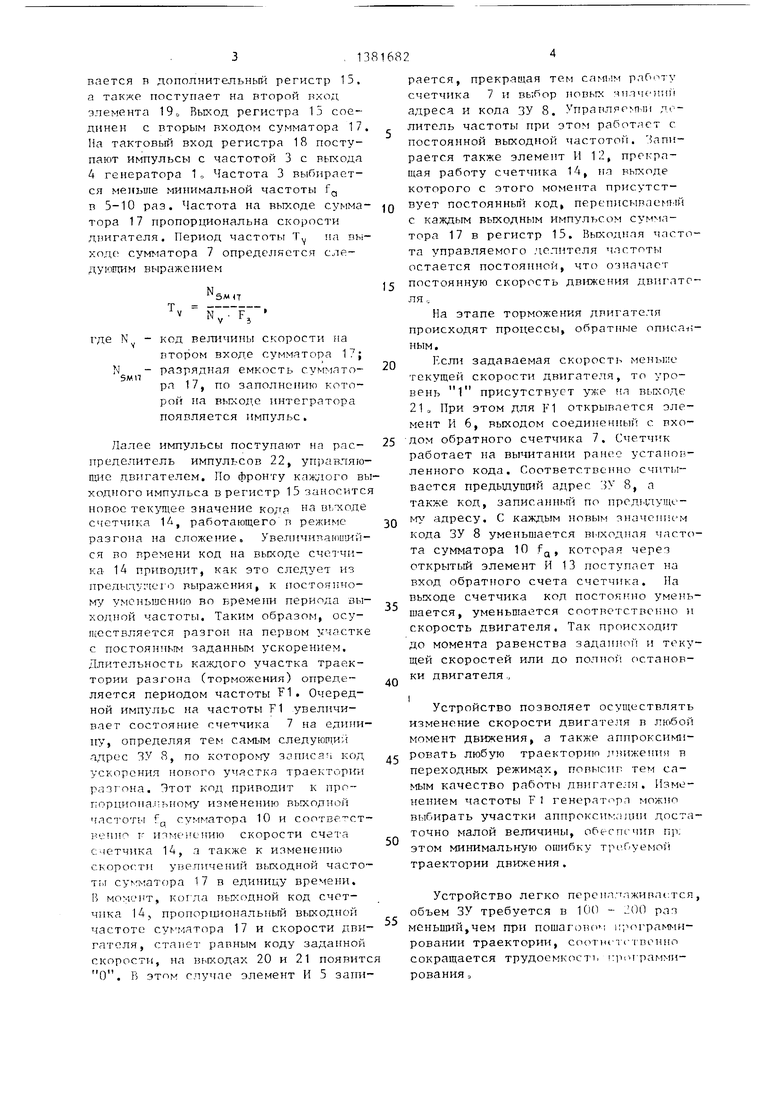
Устройство содержит генератор импульсов 1 с выходами 2-4, выход 3 через первый и второй элементы И 5 и 6 подключен к выходам реверсивног счетчика 7, с выходом которого связно запоминающее устройство (ЗУ) 8, управляемый делитель частоты 9 на основе сумматора 10 и регистра 11, соединенного через третий и четвер- TbDi элементы И 12 и 13 с дополнителным реверсивным счетчиком 14, выход которого соединен через регистр 15 с управляемым делителем частоты 16, на основе сумматора 17 и регистра 18, элемент сравнения кодов 19, выходы 20 и 21 которого соединены с вторыми входами элементов И 5, 6, 12, 13, и распределитель импульсов 22, соединенный входом с выходом управляемого делителя частоты 16, Вход управляемого делителя частоты 9 соединен с выходом запоминающего устройства 8, тактовый вход регистра 11 соединен с выходом 2 генератора, а тактовый вход регистра 18 - с выходом 4 генератора. Один вход элемента сравнения кодов 19 соедине с шиной задания скорости, а второй вход - с выходом дополнительного реверсивного счетчика 14,
Устройство работает следующим образом.
Траектория разгона (торможения) шагового двигателя аппроксимируется участками t, t, t.,. с постоянным ускорением. Величина ускорения для каждого участка определяется значением кода, занесенного в ЗУ 8 по адресу каждого участка,
Перед началом движения в схему сравне)1ия 19 по одному входу записывается код заданной скорости, на которую должен выйти шаговый двига тель. Начало движения осуществляется пуском генератора импульсов 1,
816822
на выходах 2, 3 и 4 которого появляются импульсы с частотами F1, F2 и F3 соответственнОо Одновременно с пуском генератора 1 срабатывает схема запуска (на функциональной схеме устройства не показана), которая вьфабатывает первый ориентирующий импульс на входе распределителя
10 импульсов 22,
Импульсы с частотой F1 поступают на первые входы элементов И 5 и 6, вторые входы которых соединены с выходами 20 и 21 элемента сравнения
15 кодов 19. На этапе разгона двигателя, когда заданная скорость превышает текущую скорость двигателя, на выходе 20 присутс 1 вует сигнал 1, который разрешает прохождение импульсов
2Q с частотой F1 через элемент И 5 на вход прямого счета реверсивного счетчика 7, Первым же импульсом на выходе счетчика 7 устанавливается код, который является кодом адреса
25 ЗУ 8, По первому адресу из ЗУ 8 выбирается значение кода величины ускорения на первом участке t, траектории разгона. Значение кода на выходе ЗУ 8 записывается на второй вход
,. сумматора 10. На тактовый вход регистра 11 поступают импульсы с выхода 3 генератора 1 с частотой F2, которая в 10 -10 раз превьш1ает частоту F1,
Частота на выходе переноса сумма35 тора 10 fq интегратора прямопропорци- ональна неличине ускорения и определяется следующим выражением
где Ng - код величины ускорения на
SM10
втором входе cyNmaTopa 10; разрядная емкость сумматора 10, по заполнез шю которой на шине переноса появляется импульс,
Выходная частота интегратора f поступает на первые входы трет1 е1 о
и четвертого элементов И 12 и 13 На этапе разгона 1 на выходе 20 разрешает прохождение импульсов с выхода сумматора Ю через элемент И 12 на вход прямого счета дополнительного реверсивного счетчика 14, Код на выходе счетчика 14 прямо пропорционален текущей скорости двигателя. Этот код первым ориентирующим импульсом со схемы запуска переписывается в дополнительный регистр 15. а также поступает на второй вход элемента 19 Выход регистра 15 соединен с вторым входом сумматора 17. На тактовый вход регистра 18 поступают импульсы с частотой 3 с выхода А генератора 1„ Частота 3 выбирается меньше минимальной частоты fg в 5-10 раз. Частота на выходе сумматора 17 пропорциональна скорости двигателя. Период частоты Т, на вь;- ходе сумматора 7 определяется сле- дуюпщм выражением
N
5М (7
N,
N, 5МП
КОД величины скорости на втором входе сумматора 17; разрядная емкость .тo- ра 17, по заполнению которой на выходе интегратора появляется импульс.
Далее импульсы поступают на распределитель импульсов 22, уп1)авляю- щие двигателем. По фронту каж/юго вы ХОД1ГОГО импульса в регистр 15 заноситс новое текущее значение кода из вь ходе счетчирса , работающего п режиме разгона на сложе ие« Увеличипатишй - ся во времени код на выходе счетчика 1А приводит, как это следует из предып,у 1:его выражения, к постоянному уменьшению во времени периода выходной частоты. Таким образом, осуществляется разгон на первом участке с постоянным заданным ускорением. Длительность каждого участка траектории разгона (торможения) определяется периодом частоты F1, Очередной импульс на частоты F1 увеличивает состояние счетчика 7 на едтш- пу, определяя тем самым следующий адрес ЗУ 8, по кoтopo ry зописан код ускорения нового участка траектории разгона. Этот код приводит к про- г;орпиона,пьному изменению выходной частоты fg сумматора 10 и соотве- ст- ренно к ипме ению скорости счета счетчика 1А, а также к измене П1ю скорости увеличений выходной частоты cyNfbiaTopa 17 в единицу времени. ) MOML HT, к(л-да выходной код счетчика 1А, пропорциональный выходной частоте cy мaтopa 17 и скорости двигателя, станет равным коду заданной скорости, на выходах 20 и 21 появитс О. В этом случае элемент И 5 запи0
5
0
5
0
5
0
5
0
5
рается, прекращая тем самым работу счетчика 7 и выбор новых значе)пн адреса и кода ЗУ 8. Управляе т111 делитель частоты при этом работает с постоянной выходной частотой. Запирается также элемент И 12, прекращая работу счетчика 14, на выходе которого с этого момента присутствует постоянный код, пepeпиcыRae т IЙ с каждым выходным импул,сом тора 17 в регистр 15. Выход1 ая частота управляемого делителя частоты остается постоянной, что означает постоянную скорость движения двигателя ,.
На этапе торможения двигателя происходят процессы, обратные onucai;- ным.
Если задаваемая скорость меньше текущей скорости двигателя, то уровень 1 присутствует уже на выходе 21 „ При этом для F1 открывается элемент И 6, выходом соединенный с входом обратного счетчика 7. работает на вычитании ранее установленного кода. Соответственно счит1)1- вается предьщупшй адрес ЗУ 8, а также код, записанньй по предыдущему адресу. С каждым новым значеунк м кода ЗУ 8 уменьшается выходная частота сумматора 10 f, которая через открытый элемент И 13 поступает на вход обратного счета счетчика. На выходе счетчика код постояь:но уменьшается, уменьшается соотпетствеь но и скорость двигателя. Так происходит до момента равенства заданной и текущей скоростей или до полтюй с станов- ки двигателя„
Устройство позволяет осуществлять изменение скорости двигателя в любой момент движения, а также аппрокси№1- ровать любую траекторию ;т гжения в переходных режимах, повысил тем самым качество работы двигателя. Изменением частоты F 1 генератора можно выбирать участки аппроксимации достаточно малой величины, обеспечив пр; этом минимальную ошибку требуемо траектории движения.
Устройство легко перенп; лжива1;тся, объем ЗУ требуется в 100 - 00 раз меньший,чем при пошаговс ; i;;iorpaN(MH- ровании траектории, )u iстпонно сокращается трудоемкоетт, программирования а
Формула изобретения
1. Устройство для управления шаговым двигателем, содержащее генера- тор импульсов, соединенный выходом с входом управляемого делителя частоты реверсивный счетчик, запоминающее устройство, подключенное адресными входами к выходу реверсивного счет- чика, элемент сравнения кодов, пер- вьш вход которого соединен с шиной задания скорости, распределитель импульсов, отличающееся тем, что, с целью расширения функцио нальных возможностей путем изменения скорости во время движения, введены второй управляемый делитель частоты, дополнительный реверсивный счетчик, регистр, четыре элемента 2И, а гене- ратор импульсов вьшолнен с двумя дополнительными выходами, первый из которых соединен с первыми входами первого и второго элементов 2И, первые входы третьего и четвертого эле ментов 2И соединены с выходом первого управляемого делителя частоты, вторые входы элементов 2И попарно
подключены к выходам элемента сравнения кодов, выходы первого и второго элементов 2И подключены к входам реверсивного счетчика, третьего и четвертого - к входам дополнительного реверсивного счетчика, выходы которого соединены с вторым входом элемента сравнения кодов и информационным входом регистра, тактовый вход которого соединен с входом распределителя импульсов и выходом второго управляемого делителя частоты, вход делителя которого подключен к 1 выходу регистра, а вход - с вторым дополнительным выходом генератора импульсов, а выход запоминающего устройства подкл чен к входу управляемого делителя частоты,
2, Устройство по п.1, о т л и - чающееся тем, что управляемый делитель частоты состоит из регистра и сумматора, выход переполнения которого является выходом делителя частоты, а информационный выход соединен с соответствующим входом регистра, выход которого соединен с одним из входов cyм aтopa.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления шаговым двигателем | 1984 |
|
SU1244781A1 |
| Стенд для испытания энергоустановок электромобилей | 1985 |
|
SU1255890A1 |
| Устройство для программного управления скоростью подачи | 1982 |
|
SU1067473A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Устройство для управления синусоидальными вибрациями | 1985 |
|
SU1269112A1 |
| Устройство для управления шаговым двигателем | 1986 |
|
SU1422360A1 |
| Измеритель элементов матрицы спектральной плотности мощности двух сигналов | 1989 |
|
SU1661667A2 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1374182A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Программно-управляемый модуль | 1986 |
|
SU1405028A1 |
Изобретение относится к управлению электрическими машинами и мо- ж,ет быть использовано в дискретном приводе с регулированием скорости в широких пределах. Цель состоит в расширении функциональных возможностей путем изменения скорости во время движения. Для этого генератор 1 формирует на выходе три частоты, первая из которых через элементы И 5 и 6 поступает на реверсивный счетчик 7, выходной код которого является адресом запоминающего устройства 8, в котором записаны значения ускорения каждого аппроксимирующего траек- торию движения участка. Выходной f код запоминающего устройства 8 определяет коэффициент пересчета управляемого делителя частоты на основе интегратора 9,на тактовый вход которого поступают импульсы второй частоты с генератора 1. Выходная частота интегратора 9 через элементы И 12 и 13, на вторые входы которых заведены выходные шины схемы сравнения 19 заданной и текущей скоростей, поступает на реверсивньш счетчик 14, выходной код которого определяет текущую скорость и поступает на .один вход схемы сравнения 19 и вход регистра 15, стробируемого выходными импульсами. Выходной код регистра 15 определяет коэффи циент пересчета управляемого делителя частоты на основе интегратора, на тактовый вход которого поступают импульсы третьей частоты с выхода генератора 1. Выходные импульсы с интегратора поступают на распределитель импульсов 22 и далее на силовые элементы управления двигателем. Таким образом, устройство аппроксимирует траектории движения множеством участков с постоянным ускорением. 1 з.п. ф-лы, 2 ил. с с/) 00 О5 00 ГчЭ
ti tfi Фиг. 2
| Устройство для управления шаговым электродвигателем | 1984 |
|
SU1224944A1 |
| Устройство для управления шаговым двигателем | 1981 |
|
SU1014119A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
