(21)4133163/23-02
(22)11.10.86
(46) 23.03.88. Бюл. № 11
(71)Научно-производственное объединение по механизации и автоматизации производства машин для хлопководства Технолог
(72)В.П.Анисимов, А.Г.Беренштейн, В.И.Козыряцкий, Л.Г.Чен и В.М.Сурнин. (53) 621.474.06 (088.8)
(56) Авторское свидетельство СССР № 4133163, кл. В 22 D 33/04, 1983.
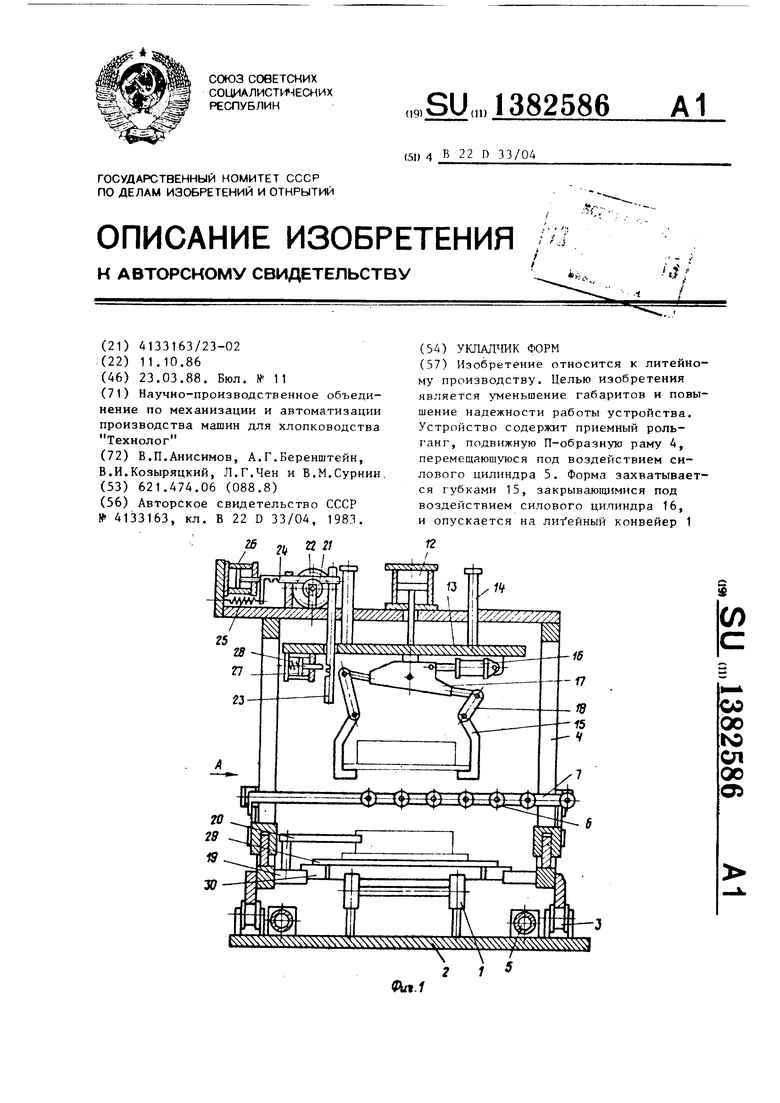
(54) УКЛАДадК ФОРМ
(57) Изобретение относится к литейному производству. Целью изобретения является уменьшение габаритов и повышение надежности работы устройства. Устройство содержит приемный рольганг, подвижную П-образную раму 4, перемещаюшуюся под воздействием силового цилиндра 5. Форма захватывается губками 15, закрывающимися под воздействием силового цилиндра 16, и опускается на лии ейный конвейер 1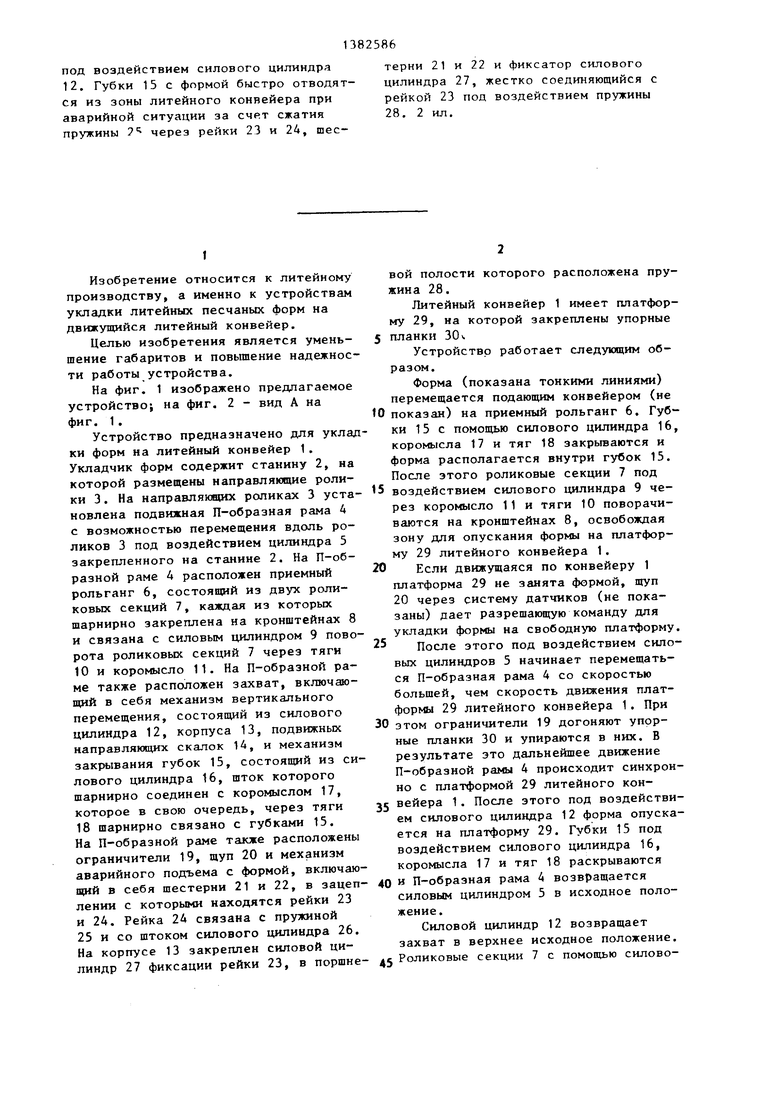
| название | год | авторы | номер документа |
|---|---|---|---|
| Укладчик форм | 1983 |
|
SU1098662A1 |
| Установка для подачи листов к гильотинным ножницам | 1974 |
|
SU510331A1 |
| Автоматическая линия для химико-термической обработки длинномерных деталей | 1989 |
|
SU1710588A1 |
| Устройство для укладки в тару листов | 1986 |
|
SU1330008A1 |
| Устройство для сортирования сухого лущеного шпона | 1988 |
|
SU1579781A1 |
| Роторная линия для центробежного литья гильз | 1981 |
|
SU1012500A1 |
| Устройство для маркирования листового материала | 1982 |
|
SU1159679A1 |
| ГИДРАВЛИЧЕСКАЯ ЛЕБЕДКА | 1998 |
|
RU2129091C1 |
| Устройство для загрузки ковшового элеватора | 1975 |
|
SU603622A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
2 1 Фм.1
i (Л
16
со 00
1C СП
оо
О)
под воздействием силового цилиндра 12, Губки 15 с формой быстро отводятся из зоны литейного конвейера при аварийной ситуации за счет сжатия пружины 7 через рейки 23 и 24, шесI
Изобретение относится к литейному производству, а именно к устройствам укладки литейных песчаных форм на движупщйся литейный конвейер.
Целью изобретения является уменьшение габаритов и повышение надежности работы устройства.
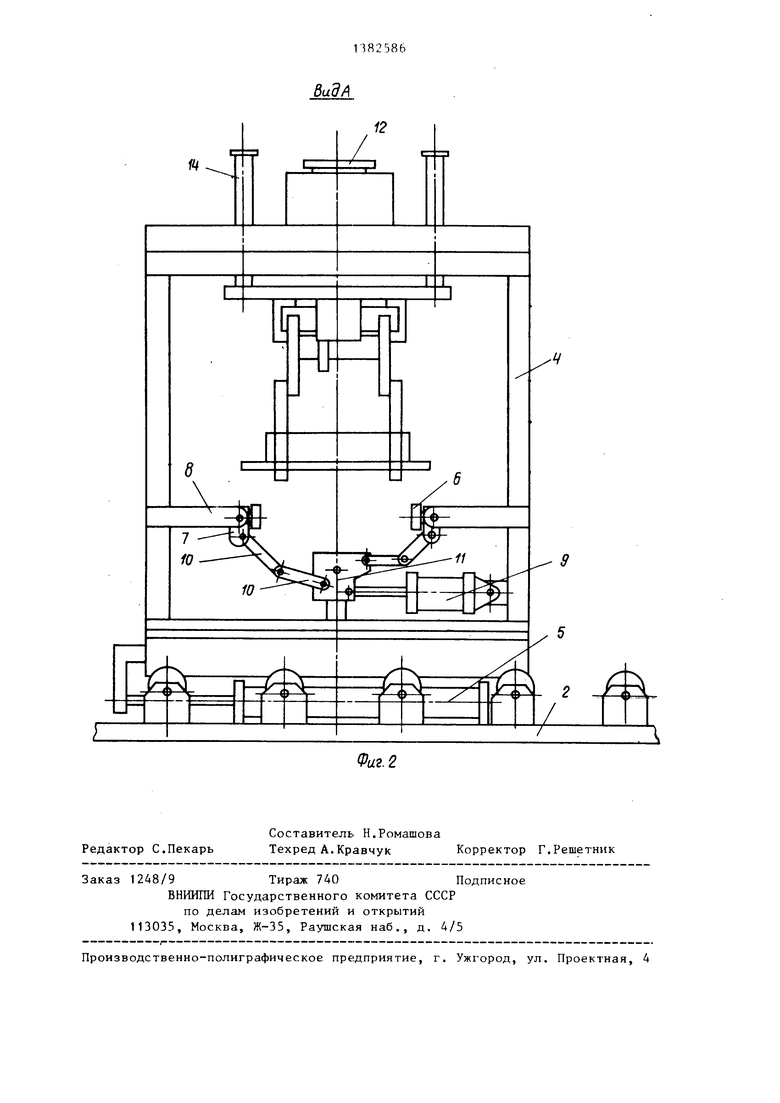
На фиг. 1 изображено предлагаемое устройство-, на фиг, 2 - вид А на фиг, 1.
Устройство предназначено для укладки форм на литейный конвейер 1. Укладчик форм содержит станину 2, на которой размещены направляющие ролики 3 , На направляющих роликах 3 установлена подвижная П-образная рама 4 с возможностью перемещения вдоль роликов 3 под воздействием цилиндра 5 закрепленного на станине 2. На П-об- разной раме 4 расположен приемный рольганг 6, состоящий из двух роликовых секций 7, каждая из которых шарнирно закреплена на кронштейнах 8 и связана с силовым цилиндром 9 поворота роликовых секций 7 через тяги 10 и коромысло 11. На П-образной раме также расположен захват, включающий в себя механизм вертикального перемещения, состоящий из силового цилиндра 12, корпуса 13, подвижных направляющих скалок 14, и механизм закрьшания губок 15, состоящий из силового цилиндра 16, шток которого щарнирно соединен с коромыслом 17, которое в свою очередь, через тяги 18 шарнирно связано с губками 15, На П-образной раме также расположены ограничители 19, щуп 20 и механизм аварийного подъема с формой, включающий в себя шестерни 21 и 22, в зацеплении с которыми находятся рейки 23 и 24, Рейка 24 связана с пружиной 25 и со штоком силового цилиндра 26. На корпусе 13 закреплен силовой цилиндр 27 фиксации рейки 23, в поршнетерни 21 и 22 и фиксатор силового цилиндра 27, жестко соединяющийся с рейкой 23 под воздействием пружины 28. 2 ил.
вой полости которого расположена пружина 28,
Литейный конвейер 1 имеет платформу 29, на которой закреплены упорные 5 планки 30.
Устройство работает следующим образом.
Форма (показана тонкими линиями) перемещается подающим конвейером (не
0 показан) на приемный рольганг 6. Губки 15 с помощью силового цилиндра 16, коромысла 17 и тяг 18 закрьшаются и форма располагается внутри губок 15. После этого роликовые секции 7 под
5 воздействием силового цилиндра 9 через коромысло 11 и тяги 10 поворачиваются на кронщтейнах 8, освобождая зону для опускания формы на платформу 29 литейного конвейера 1,
0 Если движущаяся по конвейеру 1 платформа 29 не занята формой, щуп 20 через систему датчиков (не показаны) дает разрешающую команду для укладки формы на свободную платформу,
5 После этого под воздействием силовых цилиндров 5 начинает перемещаться П-образная рама 4 со скоростью большей, чем скорость движения платформы 29 литейного конвейера 1, При
0 зтом ограничители 19 догоняют упорные планки 30 и упираются в них. В результате это дальнейшее движение П-образной рамы 4 происходит синхронно с платформой 29 литейного кон5 вейера 1. После этого под воздействием силового цилиндра 12 форма опускается на платформу 29, Губки 15 под воздействием силового цилиндра 16, коромысла 17 и тяг 18 раскрываются
0 и П-образная рама 4 возвращается силовым цилиндром 5 в исходное положение.
Силовой цилиндр 12 возвращает захват в верхнее исходное положение.
5 Роликовые секции 7 с помощью силового цилиндра 9, коромысла 11 и тяг 1C возвращаются в исходное положейие. Цикл повторяется.
На протяжении всего цикла работы при наличии рабочей среды R силовых цилиндрах рейка 24 находится в кран- нем правом положении под действием штока силового цилиндра 26, и пружина 25 растян5/та. Корпус 13 свободно ходит вдоль рейки 23. При внезапном прекращении подачи рабочей среды к силовым цилиндрам происходит перемещение поршня силового цилиндра 27 под воздействием пружины 28. При этом шток силового цилиндра 27 фиксирует рейку 23, тем самым рейка 23 оказывается жестко связанной с корпусом 13 захвата. В то же время под действием пружины 25 рейка 24 пере- мещается влево, вращая шестерню 21 и сидяную с ней на одном валу шестерню 22. Под воздействием шестерни 22, рейка 23 поднимается вверх вместе с захватом, устраняя тем самым его опускание на непрерывно движущийся конвейер 1 и создание аварийной ситуации. При этом ввиду того, что шестерня 21 имеет меньший диаметр, чем шестерня 22, а угловые скорости у них одинаковые, рейка 24 проходит меньший путь, чем рейка 23, и величина хода и скорость перемещения рейки 24 равны соответственно скорости и величине сжатия пружины 25.
Скорость рейки 23 превьш1ает скорость рейки 24 в соотношении, равном отношению диаметров шестерен 22 и 21. Скорость перемещения захвата из
опасной зоны равна скорости рейки 23 и превышает скорость сжатия пружины.
При возобновлении подачи рабочей срелы аварийный привод занимает исходное положение: шток силового цилиндра 26 перемещает рейку 24 в крайнее правое положение, пружина 25 растягивается, рейка 23 оказывается не связанной с корпусом 13 захвата.
Предлагаемая конструкция позволяет повысить безопасность труда и сократить простои, связанные с возможными аварийными ситуациями.
Формула изобретения
Укладчик форм, содержащий установленную на неподвижной раме подвижную П-образную раму, несущую захват с силовым цилиндром и аварийный привод перемещения захвата по вертикальным направляющим, приемный рольганг, расположенный под захватом, упоры и щуп, отличающийся тем, что, с целью уменьшения габаритов и повышения надежности работы, аварийный привод представляет собой смонтированную на П-образной раме пару зубчато- реечных механизмов с шестернями, установленными на общем вал, при этом рейка одного из механизмов расположена горизонтально и соединена с П-образной рамой пружинами растяжения и со штоком поршневого привода ее осевого перемещения, а рейка другого механизма установлена вертикально и имеет фиксатор в виде поршневого привода одностороннего действия, закрепленного на захвате.
