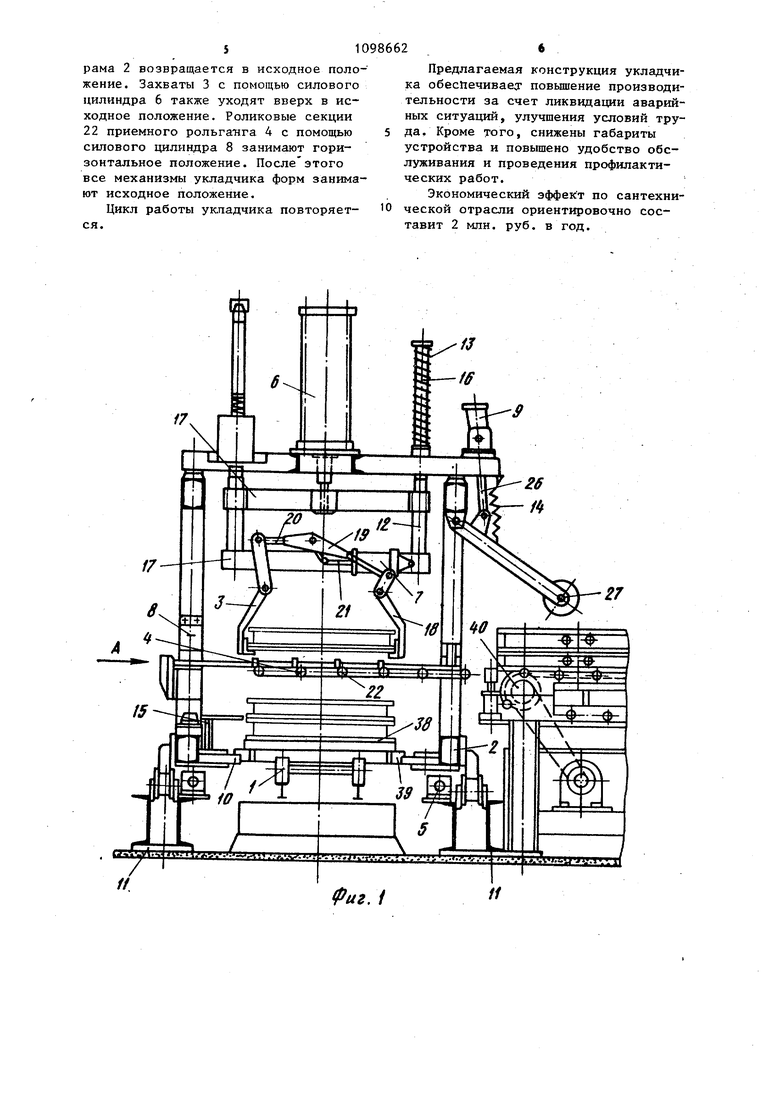
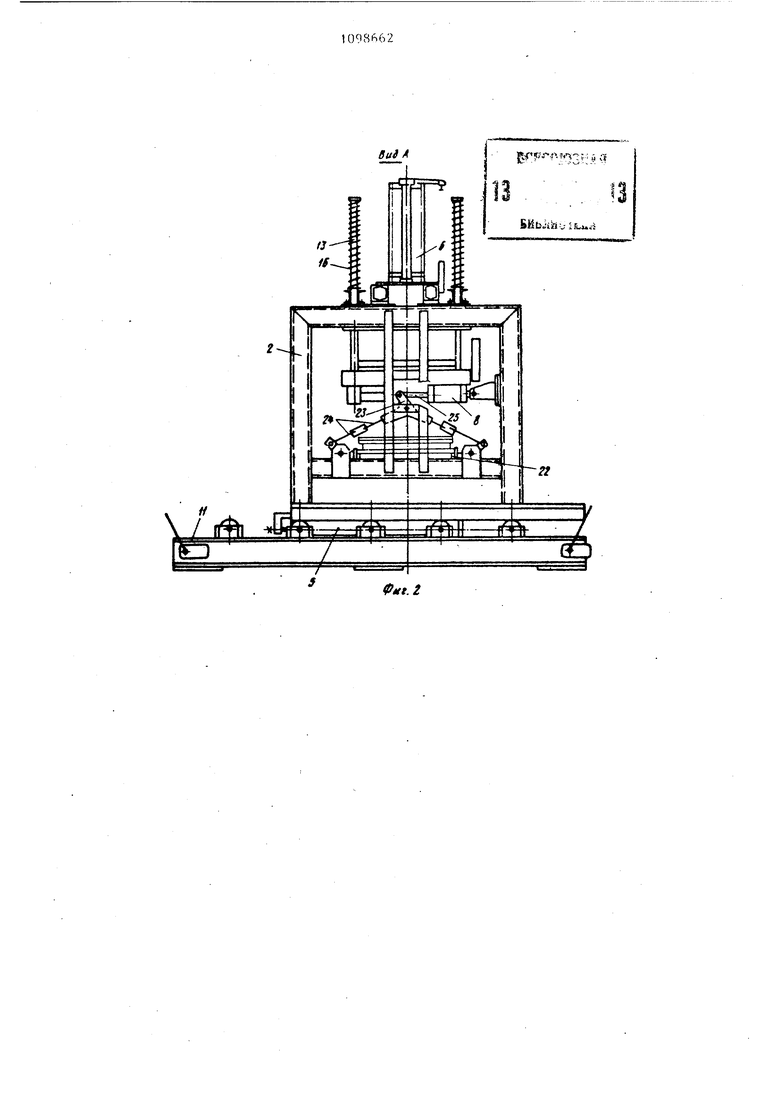
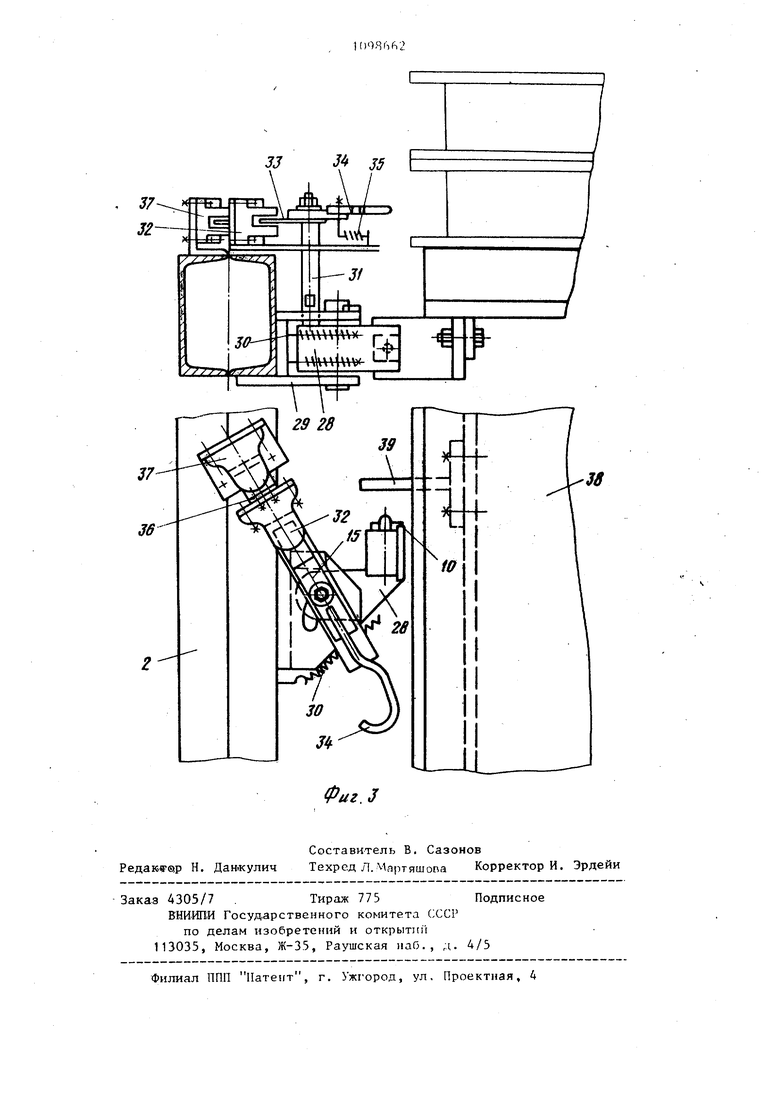
Изобретен.le относится к литейной технике, в частности к укладке литейных песчаных форм на движущийся литейньй конвейер. Известен укладчик форм на движущийся литейный конвейер, содержащий подвижную П-образную раму, захват, рольганг приемный, неподвижные опор ные рамы с опорными направляющими, упоры, контактирующиге с упорными планками платформы литейного конвей ера и силовые цилиндры: для передви жения подвижной П-образной рамы, укладки форм-з, захвата с корпусом, рольганга приемного, досылателя фор мы С 1 3. Недостатками такого укладчика фор является то, что силовые цилиндры дл передвижения подвижной рамы расположены вне ее габаритов, увеличивая те самым габариты укладчика форм в целом, а также то, что штоки силовых цилиндров укладки и досылания форм при отсутствии рабочей среды в цилин ре опускаются вниз, создавая аварийные условия для работы непрерьшно движущихся конвейеров. Наиболее близким по технической сущности и достигаемому эффекту к изобретению является устройство для укладки и сборки форм, содержащее неподвижную опорную раму, подвижную П-образную раму, захват с направляющими, приемньй рольганг, досыпатель, упоры с поворотным кулаком, силовые цилиндры 2 . Однако известное устройство ненадежно в работе, требует больших труд затрат при профилактике и ремонте оборудования, имеет невысокую производительность труда и кроме того, занимает большие производственные площади. Цель изобретения - улучшение условий труда и повышение надежности. Указанная цель достигается тем, что укладчик форм, содержашлй неподвижную опорную раму, подвижную П-образную раму, захват с направляющими, приемный рольганг, досылатель, силовые цилиндры, упоры с поворотным кулаком, снабжен пружинами сжатия, рас положенноми на направляющих захвата, предназначенными для взаимодействия с П-образной рамой пружинами растяжения, связывающими досылатель с П-о разной рамой, и щупом, закрепленным на П-образной раме. 2J Щуп выполнен в виде Т-образной опоры, связанной с цатчиками, рычагом с лепестком и пружиной растяжения, при этом один датчик закреплен на П-образной раме, на верхней части Т-образной опоры размещены другой датчик, рычаг с лепестком и пружина растяжения, причем лепесток и рычаг жестко соединены между собой и шарнирно закреплены на Т-образной опоре, а пружина растяжения одним концом прикреплена к рычагу, а другим к верхней части Т-образной опоры, нижний конец которой жестко соединен с поворотным кулаком упоров, а силовые цилиндры размещены в габаритах П-образной рамы. На фиг. 1 изображено устройство, разрез; на фиг. 2 - вид А на фиг. 1, на фиг. 3 - щуп свободной платформы. Устройство предназначено для укладки форм на литейный конвейер 1. Укладчик форм содержит подвижную П-образную раму 2, на которой расположены захват 3, приемный рольганг 4, силовой цилиндр 5 для передвижения подвижной П-образной рамы 2, силовые цилиндры 6 и 7 захвата 3, силовой цилиндр 8 приемного рольганга 4, силовой цилиндр 9, выполняющий функцию досылателя форм, упоры 10, неподвижные опорные рамы 11, направляющие 12 с пружинами 13 сжатия, пружина 14 растяжения, щуп 15. Неподвижные опорные рамы 11, служащие для установки на них П-образной рамы 2, расположены по обе стороны литейного конвейера 1 и жестко укреплены на полу цеха. Захват 3 служит для подъема и опускания формы. Направляющие 12 захвата 3 выполнены с удлиненными концами 16, скрепляющими раму 17. На удлиненных концах 16 направляющих закреплены пружины 13 сжатия. На раме 17 размещены двуплечие рычаги 18 с коромыслом 19 и тягами 20. Коромысло 19 шарнирно соеди1 ено со штоком 21 силового цилиндра 7, шарнирно закрепленного на раме 17. Рольганг 4 состоит из двух роликовых секций 22 {фиг. 2), которые шарнирно закреплены на подвижной П-образной раме 2 и соединены с коромыслом 23 тягами 24. Коромысло шариирно соединено со штоком 25 силового цилиндра 8. Силовой 1Щ.ГГИИ.ДР ) {фиг. 1) закре лен шарпирно на подвижной П-образной раме 2, шток 26 которого шарннр но связан с рычагом 27, конец которого прикреплен к подвижной П-образной раме 2. Пр ткина 14 растяжелия соединяет рычаг 27 досылателя с рамой 2 с целью исключения авари ной ситуации. Упор 10 (фиг. 3) содержит поворо ный кулак 28, шарнирно соединенньй со своим корпусом 29, и связан с ним двумя пружинами 30 растяжения. Щуп 15 (iJiHr. 3) из Т-образной опоры-31, нижний конец которой жестко соединен с поворотным кулаком 28 упором 10. На верхнем конце Т-образной опоры 31 закреплен датчик 32, который свободно связан с лепестком 33. Лепесток 33 жестко соединен с рычагом 34. Лепесток 33 и рычаг 34 шарнирно закреплены на верхнем конце Т-образной опоры 31 и подпружинены пружиной 35 растяжения. В месте крепления да -чика 32 жестко закреплен лепесток 36, котор свободно связан с датчиком 37, а последний жестко закреплен на подвижной П-образной раме 2. Датчик 37 и -лепесток 36 введены конструкцию с целью обеспечения без опасности работы укладчика форм;и в связи с тем, что рычаг 34 может отк ло-няться самопроизвольно во время поломки пружин или рабочим во время ремонта и профилактики укладчика форм. Линейный конвейер 1 (фиг. 1) име ет платформу 38, на которой закреплены упорные планки 39. Укладчик форм работает в совокуп ности с механизмом для подачи форм, например, цепным автоматическим конвейером 40 (фиг. 1). Исходным является следующее поло жение узлов и механизмов. Рабочая среда подведена в штоковые полости силовых цилиндров 5-9. Поворотные кулаки 28 упоров 10 прижаты пружинами 30 к выступающей части корпуса 29. Лепестки 33 и 36 находятся соответственно в датчиках 32 и 37. Устройство работает следующим образом. Форма (показана тонкими линиями) подводится цепным автоматическим конвейером 40 к приемному рольгангу 4, затем силовой цилиндр 9 через ры чаг 27 досыпает форму в зону зах-вата 3, где рычаги 18 захвата 3 -uii.pi.iваются с помощью силового цилиндра 7 через коромыстю 19, тяги 20, шток 21. После закрытия захвата 3 роликовые секции 22 опускаются вниз с помощью силового цилиндра 8 через коромысло 23, тяги 24, шток 25. Укладчик форм готов к простановке формы. Необходимо найти движущуюся свобод-, ную платформу 38 литейного конвейера 1, и щуп 15 платформы включается в работу. Кулаки 28 упоров 10 вместе с Т-образной опорой 31 поворачиваются упорными планками 39. Если платформа 38 гже занята формой, то рычаг 34 отклоняется и выводит лепесток 33 из датчика 32, одновременно лепесток 36 выходит из датчика 37. Это положение лепестков создает команду, запрещающую укладку формы на эту платформу. Движущаяся платформа 38 с упорными планками 39 дает возможность кулакам 28 и Т-образной опоре 31 занять исходное положение с помощью пружин 30 и 35 растяжения. Если же на платформе 38 литейного конвейера 1 формы нет, то движущаяся платформа 38 с упорными планками 39 отклоняет кулаки 28 вместе с Т-образной опорой 31. При этом рычаг 34 не отклоняется, так как платформа не занята. Лепесток 33 не выходит из паза датчика 32, а лепесток 36 выходит из паза датчика 37. Это положение лепестков 33 и 36 дает команду для укладки формы на свободную платформу. Как только упорные планки 39 .пройдут кулаки 28 и последние возвратятся в исходное положение под действием пружин 30, начинают работать силовые цилиндры 6. Они двигают подвижную П-образную раму 2 со скоростью большей, чем скорость движения платформы 38 литейного конвейера 1. При этом кулаки 28 догоняют упорные планки 39 и упираются в них. Далее движение подвижной П-образной рамы едет синхронного со скоростью движения платформы литейного конвейера 1, и в это время силовой цилиндр 6 опускает форму на выбранную платформу. Захваты 3 раскрываются силовым цилиндром 7, и подвижная П-образная
рама 2 возвращается в исходное положение. Захваты 3 с помощью силового цилиндра 6 также уходят вверх в исходное положение. Роликовые секции 22 приемного рольганга 4 с помощью силового цилиндра 8 занимают горизонтальное положение. После этого все механизмы укладчика форм занимают исходное положение.
Цикл работы ук-падчика повторяется.
Предлагаемая конструкция укладчика обесПечиваед- повышение производительности за счет ликвидации аварийных ситуаций, улучшения условий труда. Кроме того, снижены габариты устройства и повышено удобство обслуживания и проведения профилактических работ.
Экономический эффект по сантехнической отрасли ориентировочно составит 2 млн. руб. в год.
| название | год | авторы | номер документа |
|---|---|---|---|
| Укладчик форм | 1986 |
|
SU1382586A1 |
| Автоматический формовочный блок | 1982 |
|
SU1247152A1 |
| Устройство для передачи изделий с подающего конвейера на приемный | 1985 |
|
SU1270091A1 |
| Устройство для простановки стержней | 1982 |
|
SU1036437A1 |
| АВТОМАТИЧЕСКИЙ УКЛАДЧИК СТАЛЬНЫХ ХОЛОДНОГНУТЫХ ПРОФИЛЕЙ ТИПА П И С | 2024 |
|
RU2828529C1 |
| Робот | 1988 |
|
SU1538994A1 |
| Устройство для укладки листов в пирамиду | 1989 |
|
SU1776644A1 |
| Установка для резки листового проката | 1987 |
|
SU1470468A1 |
| Автоматическая линия для химико-термической обработки длинномерных деталей | 1989 |
|
SU1710588A1 |
| Устройство для навешивания заготовок покрышек на подвесной конвейер | 1979 |
|
SU927667A1 |
1. УКЛАДЧИК ФОРМ, содер-. жащий неподвижнзпо опорную раму, подвижную П-образную раму, захват с .. направляющими, приемный рольганг, досыпатель силовые цилиндры, упоры с поворотным кулаком, о т л и ч а ю щ и и с я тем, что, с целью улучшения условий труда и повьшения на дежности, он снабжен пружинами сжатия, расположенными на направляющих захвата, предназначенными-для взаимодействия с П-образной рамой, пружинами растяжения, связьгаакмцими досылатель с П-образной рамой, и щупом, закрепленным на П-образной раме. 2. Укладчик по п. 1, о т л ичающийс я тем, что щуп выполнен в виде Т-образной опоры, связанной с датчиками, рычагом с лепестком и пружиной растяжения, при этом один датчик закреплен на П-образной. раме, на верхней части Т-образной опоры размещены другой датчик, рычаг с лепестком и пружина растяжения, причем лепесток и рычаг жестко соег динены между собой и шар«щ)но закреплены на Т-образной опоре, а пружина растяжения одним концом прикреплена к рычагу, а другим - к верхней части Т-образной опоры, нижний конец которой жестко соединен с поворотнымКулаком упоров, а силовые цилиндры размещены в габаритах (П-образной рамы. ;О эо 35 N3
(риг. 1
itt.Z
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Укладчик форм | |||
| ПРИБОР ДЛЯ СЪЕМКИ ПЛАНА МЕСТНОСТИ | 1922 |
|
SU548A1 |
| М., 1974 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
