Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам для автоматического вождения машинно-тракторных агрегатов, и может быть использовано при уборке чая и других сельскохозяйственных культур.
Известно устройство для автоматического вождения машинно-тракторного агрегата, включаюш,ее самоустанавливаюш,ийся в нейтральное положение с помош,ью упругого звена копирующий ш,уп, кинематически связанный с 1-идрораспределителем, и силовой гидроцилиндр 1.
Однако известное устройство характеризуется низкой точностью вождения агрегата.
Наиболее близким к предлагаемому по технической суш,ности и достигаемому результату является устройствр для автоматического вождения машинно-тракторного агрегата, включающее самоустанавливающийся в нейтральное положение с помощью упругого звена копирующий щуп, кинематически связанный с гидрораспределителем, дополнительный гидрораспределитель, регулятор по курсу и силовой гидроцилиндр 2.
Недостатками данного устройства являются сложность конструкции и низкая точность вождения агрегата.
Цель изобретения - упрощение конструкции и повыщение точности вождения машинно-тракторного агрегата.
Поставленная цель достигается тем, что в устройстве для автоматического вождения машинно-тракторного агрегата каждый из гидрораспределителей выполнен в виде щестиходового крана, валики которых установлены соосно, а регулятор но курсу выполнен в виде четырехходового крана, валик которого кинематически связан с рычагом поворота нагфавляюн их колес трактора, при этом два хода гидрораспределителя гидравлически сообщены с четырехходовым краном и двумя ходами дополнительного гидрораспределителя, третий и четвертый ходы гидрораспределителей гидравлически связаны .между собой и с одной из полостей силового гидроцилиндра, а пятый и шестой ходы Iидрораспределителей гидравлически сообщены .между собой и с другой полостью силового гидроцилиндра.
Кроме того, устройство снабжено шаговым электродвигателем, вал которого кинематически связан с валиком дополнительного гндрораспределителя.
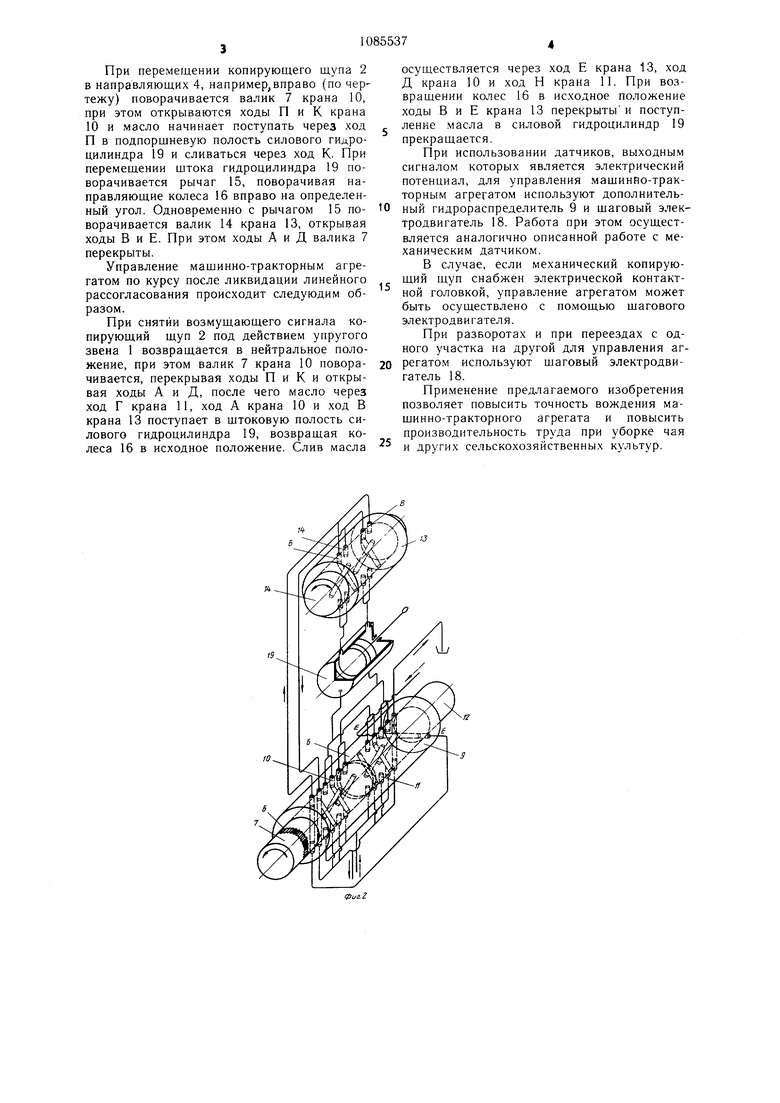
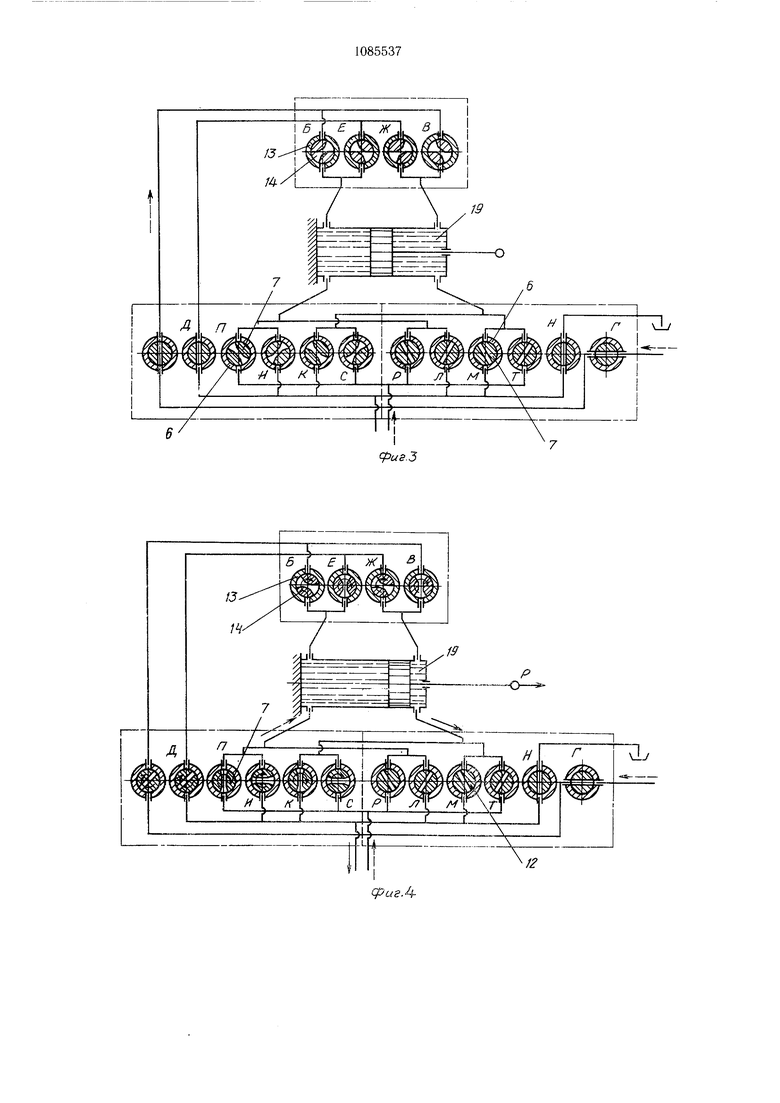
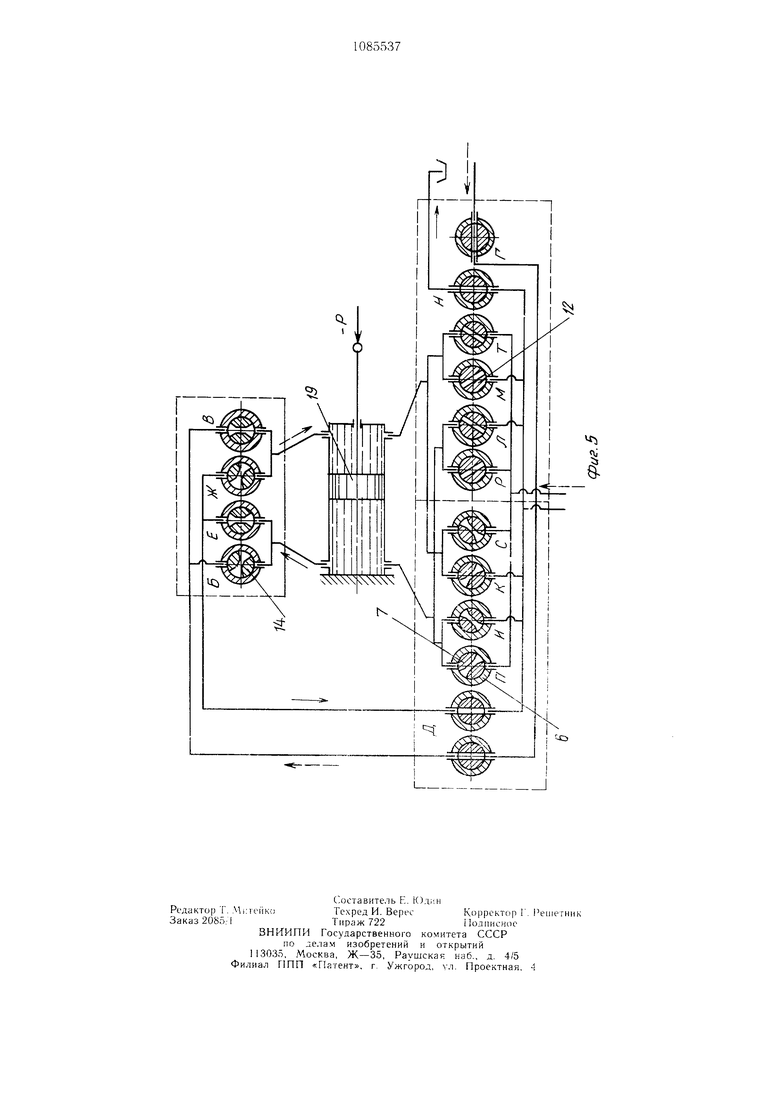
На фиг. 1 изображено предлагае.мое устройство, общий вид; на фиг. 2 - гидрораспределители и регулятор по курсу; на фиг. 3 - исходное положение валиков гидрораспределителей и регулятора но курсу; на фиг. 4 - рабочее положение валиков при обработке у.равляющих воздействий, поступающих на копирующий щуп; на фиг. 5 - рабочее положение валиков при возврате направляющих колес в нейтральное положение.
Устройство для автоматического вождения машинно-тракторного агрегата включает самоустанавливающийся в нейтральное положение с помощью упругого звена копирующий щуп 2, на котором шарнирно закреплены отражатели 3. Копирующий щуп 2 размещен в поперечных относительно продольной оси агрегата направляющих 4 и через зубчатую рейку 5 связан с зубчатым колесом 6, установленным на валике 7 гидрораспределителя 8. Последний и дополнительный гидрораспределитель 9 выполнены в виде шестиходовых кранов 10 и 11 соответственно. Валики 7 и 12 гидрораспределителей 8 и 9 установлены соосно. Регулятор по курсу выполнен в виде четырехходового крана 13, валик 14 которого кинематически связан с рычагом 15 поворота направляющих колес 16 трактора (не показан). Валик 12 дополнительного гидрораспределителя 9 кинематически связан с валом 17 щагового электродвигателя 18. Ход А гидрораспределителя 8 с одной стороны гидравлически сообщен с ходами Б и В четырехходового крана 13, а с другой стороны - с ходом Г крана 11. Ход Д крана. 10 гидравлически связан с одной стороны с ходами В и Ж крана 13, а с другой - с ходами И, К крана 10, с ходами Л, М и Н крана 11 и со сливом. Ход П крана 10 гидравлически сообщен с одной стороны с ходом И крана 10, с ходами F и Л крана 11 и с подпоршневой полостью силового гидроцилиндра 19, а с другой - с ходом С крана 10, с ходами Р и Т крана 11 и с напорной линией гидронасосы (не показаны). Ход К крана 10 гидравлически связан с ходом С крана 10, с ходами М и Т и со щтоковой полостью силового гидроцилиндра 19. Ход Г крана 11 гидравлически сообщен с напорной линией гидронасоса, а ход Н - со сливной магистралью. Ходы Б и Е крана 13 гидравлически связаны с подпорщневой полостью гидроцилиндра 19, а ходы В и Ж - со штоковой полостью.
Ход А .и Д валика 7 и ход Г валика 12 выполнены параллельно между собой. Ход П валика 7 выполнен параллельно ходу К и ходам Р и .Vl валика 12, а ход И параллелен ходу С валика 7 и ходам Л и Т валика 12. Ход Б валика 14 выполнен параллельно ходу Ж, а ход Е - параллельно ходу В.
Предлагаемое устройство работает следующим образом.
При движении агрегата в нейтральном положении щупа 2 напорная линия гидронасоса через ход Г крана 11 и ход А крана 10 связана с краном 13, а сливная магистраль через ход Н крана 1 и ход Д - с краном 13. Последний в э том положении перекрыт и сброс масла осуществляется через перепускной клапан (не показан).
При перемещении копирующего щупа 2 в направляющих 4, например,вправо (по чертежу) поворачивается валик 7 крана 10, при этом открываются ходы П и К крана 10 и масло начинает поступать через ход П в подпорщневую полость силового гидроцилиндра 19 и сливаться через ход К. При перемещении щтока гидроцилиндра 19 поворачивается рычаг 15, поворачивая направляющие колеса 16 вправо на определенный угол. Одновременно с рычагом 15 поворачивается валик 14 крана 13, открывая ходы В и Е. При этом ходы А и Д валика 7 перекрыты.
Управление мащинно-тракторным агрегатом по курсу после ликвидации линейного рассогласования происходит следуюдим образом.
При снятии возмущающего сигнала копирующий щуп 2 под действием упругого звена 1 возвращается в нейтральное положение, при этом валик 7 крана 10 поворачивается, перекрывая ходы П и К и открывая ходы А и Д, после чего масло через ход Г крана 11, ход А крана 10 и ход В крана 13 поступает в штоковую полость силового гидроцилиндра 19, возвращая колеса 16 в исходное положение. Слив масла
осуществляется через ход Е крана 13, ход Д крана 10 и ход Н крана 11. При возвращении колес 16 в исходное положение ходы В и Е крана 13 перекрыты и поступление масла в силовой гидроцилиндр 19 прекращается.
При использовании датчиков, выходным сигналом которых является электрический потенциал, для управления мащинро-тракторным агрегатом используют дополнительный гидрораспределитель 9 и щаговый электродвигатель 18. Работа при этом осуществляется аналогично описанной работе с механическим датчиком.
В случае, если механический копирующий щуп снабжен электрической контактной головкой, управление агрегатом может быть осуществлено с помощью щагового электродвигателя.
При разворотах и при переездах с одного участка на другой для управления аг0 регатом используют щаговый электродвигатель 18.
Применение предлагаемого изобретения позволяет повысить точность вождения машинно-тракторного агрегата и повысить производительность труда при уборке чая и других сельскохозяйственных культур.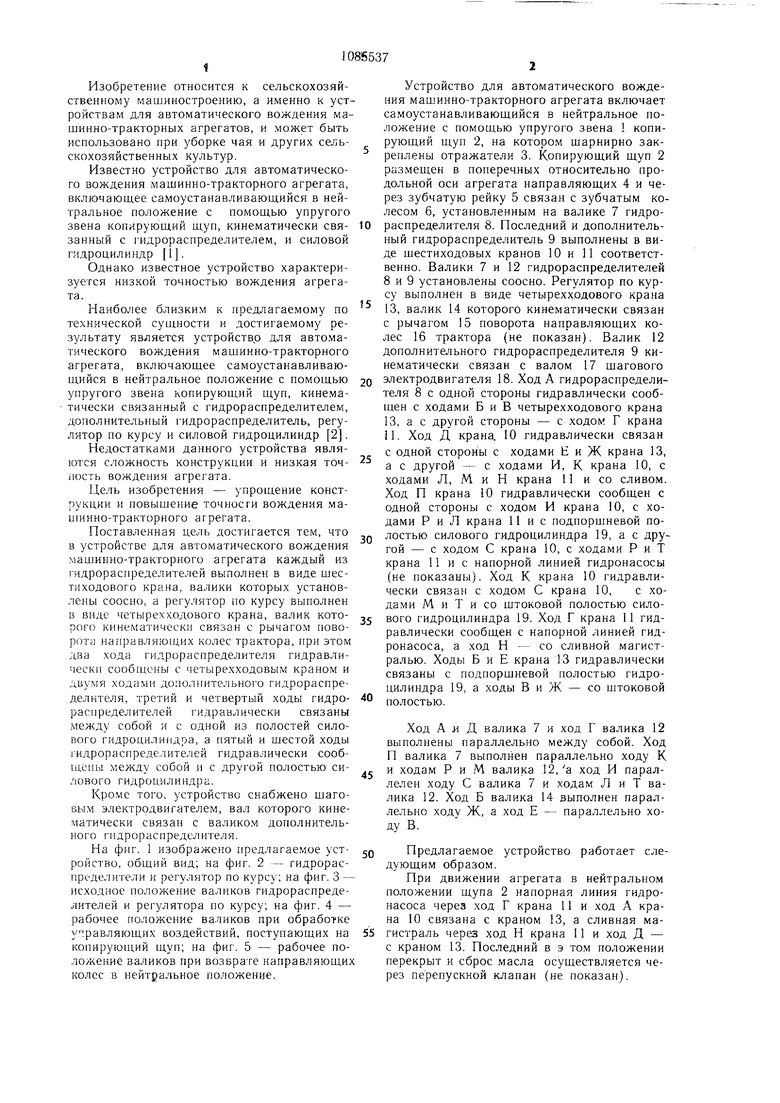
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического вождения машинно-тракторных агрегатов | 1986 |
|
SU1386066A1 |
| Устройство для автоматического направления движения колесного трактора | 1982 |
|
SU1099865A1 |
| ГИДРОМЕХАНИЧЕСКОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 2007 |
|
RU2372216C2 |
| Устройство для автоматического вождения машинно-тракторного агрегата | 1980 |
|
SU869595A1 |
| Способ автоматического вождения самоходной машины и устройство для его осуществления | 1989 |
|
SU1748682A1 |
| Гидромеханическое устройство для автоматического вождения сельскохозяйственной машины по борозде | 1988 |
|
SU1604184A1 |
| Устройство для автоматического направления движения тракторного агрегата | 1978 |
|
SU710538A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2000 |
|
RU2181232C1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| УСТРОЙСТВО ДЛЯ ВОЖДЕНИЯ ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ ПО РЯДКАМ РАСТЕНИЙ | 2007 |
|
RU2354102C1 |
1. УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ВОЖДЕНИЯ МАШИННОТРАКТОРНОГО АГРЕГАТА, включающее самоустанавливающийся в нейтральное положение с помощью упругого звена копирующий щуп, кинематически связанный с гидрораспределителем, дополнительный гидрораспределитель, регулятор по курсу и силовой гидроцилиндр, отличающееся тем, что, с целью упрощения конструкции и повыщения точности вождения агрегата, каждый из гидрораспределителей выполнен в виде шестиходового крана, валики которых установлены соосно, а регулятор по курсу выполнен в виде четырехходового крана, валик которого кинематически связан с рычагом поворота направляющих колес трактора, при этом два хода гидрораспределителя гидравлически сообщены с четырехходовым краном и двумя ходами дополнительного гидрораспределителя, третий и четвертый ходы гидрораспределителей гидравлически связаны между собой и с одной из полостей силового гидроцилиндра, а пятый и шестой ходы гидрораспределителей гидравлически сообщены между собой и с другой полостью силового гидроцилиндра. 2. Устройство по п. 1, отличающееся тем, что оно снабжено щаговым электродви гателем, вал которого кинематически связан (Л с валиком дополнительного гидрораспределителя.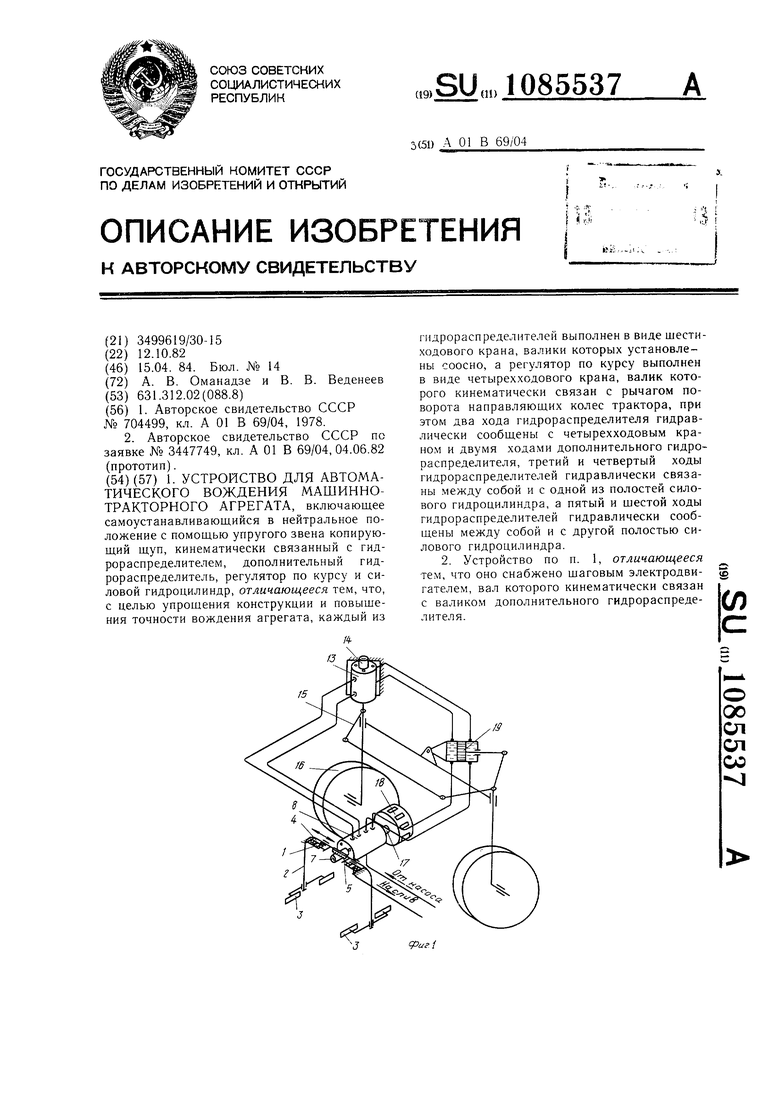
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического направления движения колесного трактора по рядкам растений | 1978 |
|
SU704499A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3447749, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
