(Л
САЭ 00 О5 4
оо
Изобретение относится к робототехнике,, а именно к модулям манипуляторов с электромеханическим приводом поступательного перемещения.
Целью изобретения является расширение технологических возможностей за счет определения положения штока привода.
На чертеже изображена схема модуля .
Модуль содержит шток 1, установ- ленньш в корпусе 2 на ползуне 3, подпружиненном к корпусу 2 пружиной 4, петлю 5 со скрученными между собой сторонами, выполненными из токопро- водного и изолированного материалов, закрепленную на изолирующей вставке 6
Выводы 7 петли 5 подключены к источнику 8 тока, Ьход которого связан с выходом блока 9 управления источником .
К выводам 7 петли 5 через блок 10 согласования подключен также измеритель 11 индуктивности. Кроме того, устройство может быть снабжено дифференцирующим блоком 12, выход которого, как и выход измерителя 11, подключен к входам блока 9 управления источником 8 тока.
Обойма 13 через подшипник 14 связывает среднюю часть петли 5 со штоком 1.
Устройство работает следующим образом.
На вход блока 9 управления источником 8 тока подается сигнал, пропорциональный пути штока 1 и его производные. Модуль отрабатывает заданное расстояние. Подшипник .15 при этом обеспечивает вращение свободного конца элемента. При раскручивании петли 5 расстояние между спиральными витками изменяется, изменяется и индуктив
0
5
0
5
0
5
0
ность петли. Таким образом, каждому положению угла закрутки петли 5 соответствует свое значение индуктивности и, следовательно, определенное значение сигнала на выходе измерителя 11. При работе двигателя на постоянном токе в качестве блока 10 согласования необходимо использовать фильтр-пробку для основной частоты. В качестве измерителя индуктивности может быть применено любое известное устрой тво мостового или резонансного типов. Выходной сигнал измерителя 11 несет информацию о величине перемещения штока 1. Этот сигнал замыкает контур обратной связи по положению и подается на вход блока 9 управления. Если необходима обратная связь по скорости, в состав системы включается дифференцирующий блок 12, осуществляющий нахождение производной от сигнала, пропорционального пути.
Формула изобретения
Модуль робота, содержащий установленный в корпусе привод поступательного перемещения, включающий петлю, выполненную из токопроводного материала, стороны которой скручены между собой, средняя часть связана со штоком, а концы петли закреплены на корпусе и подключены к источнику тока, имеющему блок управления, отличающийся тем, что, с целью расширения технологических возможностей за счет определения положения штока привода, он снабжен измерителем индуктивности и блоком согласования, при этом вход измерителя индуктивности через блок согласования соединен с концами петли привода, а выход - с блоком управления источника тока.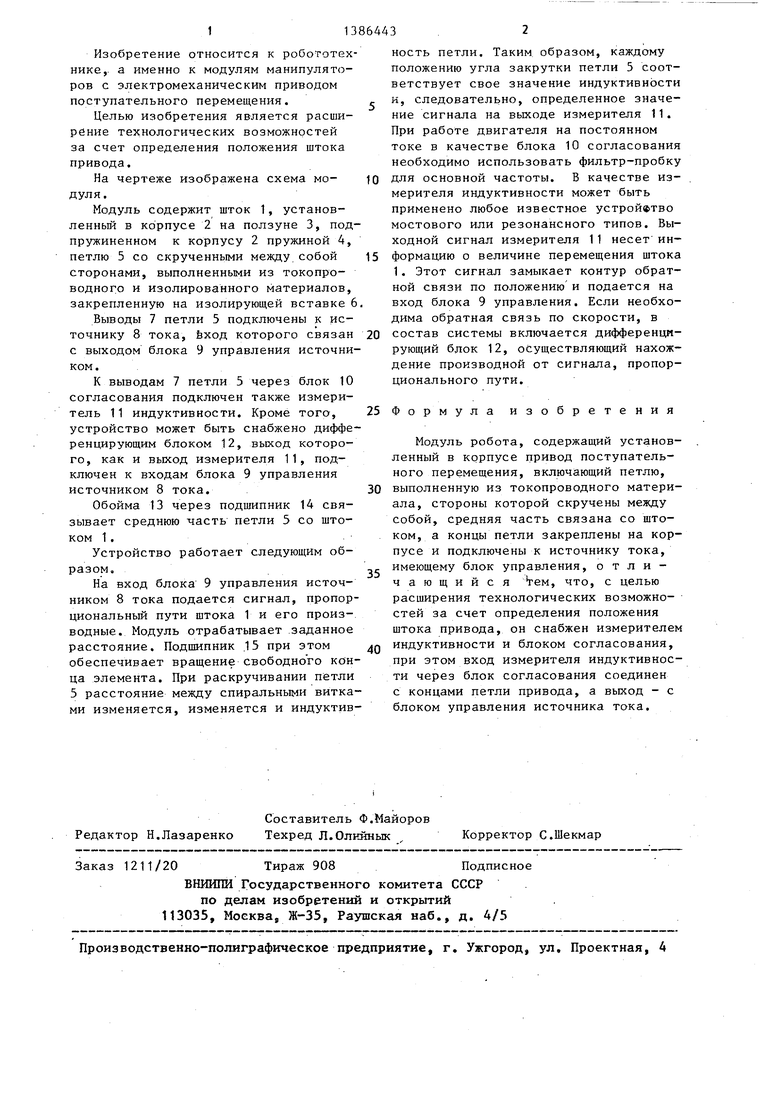
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод линейного перемещения | 1985 |
|
SU1386442A1 |
| ПОЗИЦИОННЫЙ МОДУЛЬ | 2008 |
|
RU2379176C2 |
| Привод линейного перемещения | 2015 |
|
RU2673880C2 |
| Электродинамический привод | 1985 |
|
SU1303397A1 |
| Модуль манипулятора | 1987 |
|
SU1579769A1 |
| Электродинамический привод | 1985 |
|
SU1301687A1 |
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2014 |
|
RU2592070C2 |
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2211523C2 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
Изобретение относится к робототехнике, а именно к модулям манипуляторов с электромеханическим приводом поступательного перемещения. Целью изобретения является расширение технологических возможностей за счет определения положения штока привода. При подаче тока в петлю 5, стороны которой скручены между собой, от источника тока 8, управляемого блоком 9, происходит раскручивание петли 5 и расстояние между витками петли меняется, при этом изменяется и индуктивность петли 5, измеряемая измерителем 11, подключенным к петле 5 через блок 10 согласования. Таким образом, каждому положению угла закрутки петли 5 соответствует свое значение индуктивности. 1 ил.
| Привод линейного перемещения | 1984 |
|
SU1283082A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
