Изобретение относится к позиционным приводам промышленных роботов, преимущественно гидропневматическим.
Данные приводы описаны, например, в [1].
Недостатком обычных гидроприводов с двигателями поступательного перемещения, выполненными в виде цилиндров является их повышенная сложность, трудоемкость изготовления.
Известно также выполнение исполнительных элементов в виде скрученных двойных трубчатых элементов [2] или в виде эластичного рукава, собранного из нескольких соединенных между собой по образующим труб, каждая из которых армирована винтообразным каркасом, а между трубками пропущен гибкий элемент, обеспечивающий сжатие [3]. Из всех известных аналогов наиболее близким к заявленному по своей совокупности существенных признаков является устройство [4].
Данный позиционный модуль (манипулятор) выполнен в виде ряда пластин, соединенных посредством универсальных шарниров, при этом в пластинах образованы отверстия, сквозь которые пропущены натягивающие жилы, прикрепленные одним концом к соответствующим пластинам, при этом согласно изобретению жилы выполнены в виде двойных трубчатых спиралей, закрепленных на основании и подключенных к источникам давления.
Изобретение направлено на упрощение конструкции, повышение надежности.
Это достигается тем, что позиционный модуль, содержащий подвижные штоки, к которым прикреплены подвижные элементы в виде скрученных трубок, выводы которых закреплены на основании и подключенных к блоку питания в виде источника давления, при этом согласно изобретению трубки закреплены на подвижных штоках двумя группами, имеющими противоположное направление закрутки, а подвижные штоки закреплены в подшипниках, установленных на основании штока.
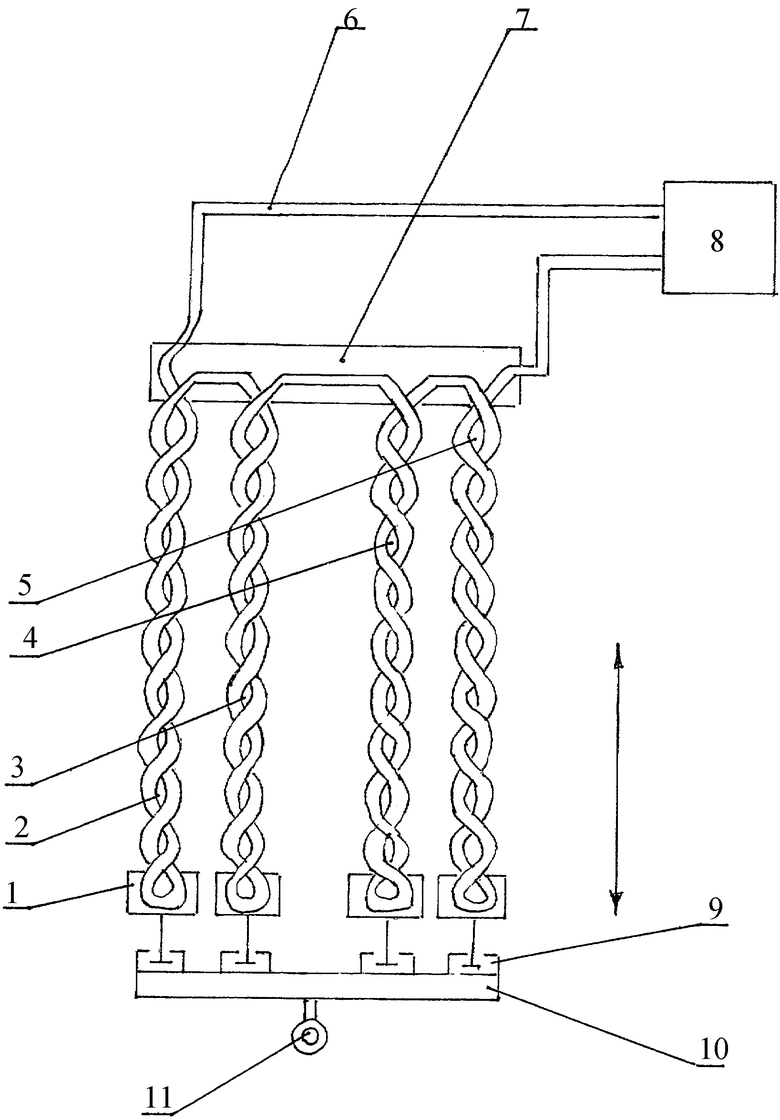
Сущность изобретения иллюстрируется чертежом, где схематично изображен предложенный модуль.
Модуль включает в себя подвижные штоки - бобышки 1, к которым прикреплены элементы 2 и 3 с одним направлением закрутки (вторая группа). Выводы 6 трубок закреплены на основании 7 и подключены к блоку питания 8 - источнику давления. Штоки-бобышки закреплены в подшипниках 9, установленных на основании 10 штока 11.
Модуль работает следующим образом. При прохождении давления от блока 8 по трубкам обеих групп происходит взаимное раскручивание трубок, составляющих отдельные двойные спирали. В результате длина двойных спиралей увеличивается, что приводит к опусканию подвижного элемента 1. При отключении давления система возвращается в исходное состояние - вверх, т.е. движение происходит по стрелке, показанной на чертеже. Одновременно с изменением длины каждой двойной спирали ее торец, закрепленный в подвижном элементе 1, испытывает действие вращающего момента, возникающего при раскрутке петли. Бобышка 1 вращается в подшипнике 9. Однако действие моментов двойных спиралей одной группы (например, спирали 2 и 3), компенсируется противоположным моментом, который развивают спирали другой группы, а именно 4 и 5. Таким образом, шток 11 испытывает только действие сил, изменяющих длину спиралей. Элементы 1 и 7 могут выполняться на основе каркаса, заполненного эпоксидной смолой.
Технико-экономические преимущества данного устройства следующие.
1. Имеется возможность поступательного перемещения, не достигаемая в прототипе.
2. Компактность конструкции, возможность размещения ее вдоль руки робота.
3. Повышенные удельные усилия за счет применения групп двойных спиралей и за счет увеличенной длины спиралей.
4. Повышенная надежность, связанная с отсутствием преобразователя вращательного движения в поступательное и с отсутствием армирующего каркаса.
5. Модульное исполнение дает возможность варьирования количеством элементов, что повышает степень универсальности.
Источники информации
1. Козырев Ю.Г. Промышленные роботы. М. - Справочник, Машиностроение, 1983 г., 376 с., ил.
2. Авторское свидетельство СССР №581396 - Устройство для изменения давления. А.М.Литвиненко, опубл. БИ №43, 1977, с.107.
3. Авторское свидетельство СССР №476972 - Исполнительный орган манипулятора. В.П.Шматок и Г.А.Попрыкин, опубл. БИ №26, 1975.
4. Патент РФ №2247648. Манипулятор. А.М.Литвиненко, опубл. 10.03.2005 г., БИ №7.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| ПРИВОД ЛИНЕЙНОГО ПЕРЕМЕЩЕНИЯ | 2001 |
|
RU2211523C2 |
| ДВУХПЕТЛЕВОЙ СТРОП, СПОСОБ И УСТРОЙСТВО ДЛЯ ЕГО ИЗГОТОВЛЕНИЯ | 1995 |
|
RU2097302C1 |
| Электродинамический привод | 1985 |
|
SU1303397A1 |
| Цепевязальный автомат и способ вязки цепи цепевязальным автоматом | 2023 |
|
RU2827820C1 |
| ПРОХОДЧЕСКИЙ РОБОТ И ТРАНСПОРТИРУЮЩИЙ МЕХАНИЗМ ПРОХОДЧЕСКОГО РОБОТА | 1988 |
|
SU1549153A1 |
| Модуль робота | 1986 |
|
SU1386443A1 |
| Привод линейного перемещения | 1985 |
|
SU1386442A1 |
| Спиральный компрессор "сухого сжатия" | 2023 |
|
RU2823152C1 |
Изобретение относится к робототехнике, а именно к позиционным приводам промышленных роботов, преимущественно гидропневматическим. Позиционный модуль содержит подвижные штоки, к которым прикреплены подвижные элементы в виде скрученных трубок, выводы которых закреплены на основании и подключенных к блоку питания в виде источника давления. Трубки закреплены на подвижных штоках двумя группами, имеющими противоположное направление закрутки. Подвижные штоки закреплены в подшипниках, установленных на основании штока. Изобретение позволит повысить удельные усилия за счет применения групп двойных спиралей и увеличенной длины спиралей, повысить надежность и компактность конструкции, модульное исполнение дает возможность варьирования количеством элементов, что повышает степень универсальности. 1 ил.
Позиционный модуль, содержащий подвижные штоки, к которым прикреплены подвижные элементы в виде скрученных трубок, выводы которых закреплены на основании и подключенных к блоку питания в виде источника давления, отличающийся тем, что трубки закреплены на подвижных штоках двумя группами, имеющими противоположное направление закрутки, а подвижные штоки закреплены в подшипниках, установленных на основании штока.
| МАНИПУЛЯТОР | 2003 |
|
RU2247648C1 |
| Манипулятор | 1986 |
|
SU1323362A1 |
| Исполнительный орган манипулятора | 1974 |
|
SU476972A1 |
| ПОДУШКА ДЛЯ УСТАНОВКИ ЦАПФЫ ВАЛКА | 2004 |
|
RU2339470C2 |
| US 3497083 A, 24.02.1970. | |||

