Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промьшленности.
Цель изобретения - расширение ди пазона нагрузокj за счет обеспечени быстрой и точной настройки нейтрального положения подвижного звена.
На фиг. 1 представлен модуль вертикального перемещенияJобщий вид; на фиг 2 - то же5 вид сверху.
Модуль вертикального перемещения состоит из корпуса 1, в опорах 2 которого установлено подвижное звено Подвижное звено 3 удерживается в нетральном положении упругим элементо 4 в виде пружины кручения, установленной на основании корпуса 1. Один конец этой пружины взаимодейстззует с подвилгаым звеном 3 через ролик 5 (для уменьшения трения), Другой конец закреплен на храповом колесе 6 узла регулировки нейтрального положения э установленном на боковой стенке корпуса,1 и фиксируемом от проворота собачкой 7. Ось собачки
7укреплена на каретке 8, которая может перемещаться по ходовому винту 9 на расстояние, соответствующее одному шагу храпового колеса 6. Для сообщения дополнительной энергии подвижному звену служит ревер- сивньй двигатель 10 с насадкой 11.
8крайних положениях подвилгаое зве- но 3 удерживается фиксаторами 1,2
и 13. На подвижном звене 3 модуля вертикального, перемещения закреплен модуль 14 горизонтального перемещения .
Модуль вертикального перемещения работает следуюгдим образом.
Подвижное звено 3s удерживаемое упругим элементом в виде пружины 4 кручения в нейтральном положении; переводится в одно из крайних поло- .жений. например в нижнее (фиг. 1), и захватывается фиксатором 12. Пружина кручения аккумулирует при этом энергию., необходимую для перемеш,е- ния подвижного звена 3 в противоположное крайнее положение (без уче290322
та потерь на трение). По команде от управляющего устройства (не показано) фиксатор 12 освобождает подвижное звено 3 и оно начинает движение вверх. 5 Одновременно включается двигатель 10, который, воздействуя насадкой 11 на подвияшое звено 3, сообщает ему дополнительную энергию, компенсирующую, потери. Явление резонанса, Ш имеющее место в этом случае, позволяет использовать маломощный двигатель, В момент подхода к противопо- ложршму крайнему положению срабатывает фиксатор 13 этого положения. 5 Двигатель 10 при этом отключается.
изменении веса переносимого груза нейтральное положение подвижного зЕ(ена 3 смещается. Так, при
20 увеличении веса оно опустится до положения, в котором упругие силы пружины, возрастающие при ее закручивании, будут уравновешивать вес подвижного звена 3 с грузом. Для уста-.
25 новки сместившейся нейтральной точки в прежнее рабочее положение храповое колесо 6 (а следовательно, и связанный с ним конец пружины) поворачивается на необходимый угол, где
30 оно фиксируется с помощью собачки 7.. При этом грубая настройка производится поворотом храпового колеса 6 на нужное количество зубьев, а точная - перемещением каретки 8 сзакрепJ2 ленной на ней собачкой 7. Перемещение собачки 7 передается на храповое колесо 6 и оно, доворачиваясь на необходимый угол, занимает положение, соответствующее нужному положению ней40 тральной точки.
Предлагаемая конструкция позволяет в очень широких пределах изменять нагрузки на подвижное звено модуля вертикального перемещения.
ijsj Можно изменять, например, массу переносимого груза, увеличивать или уменьшать количество модулей 14 горизонтального перемещения (фиг.1), закрепляемых обычно на этом подвижJQ ном звене. При этом изменения габаритов модуля вертикального переме- ш.ения не требуется, так как меняется всего липзь угол закручивания пружины.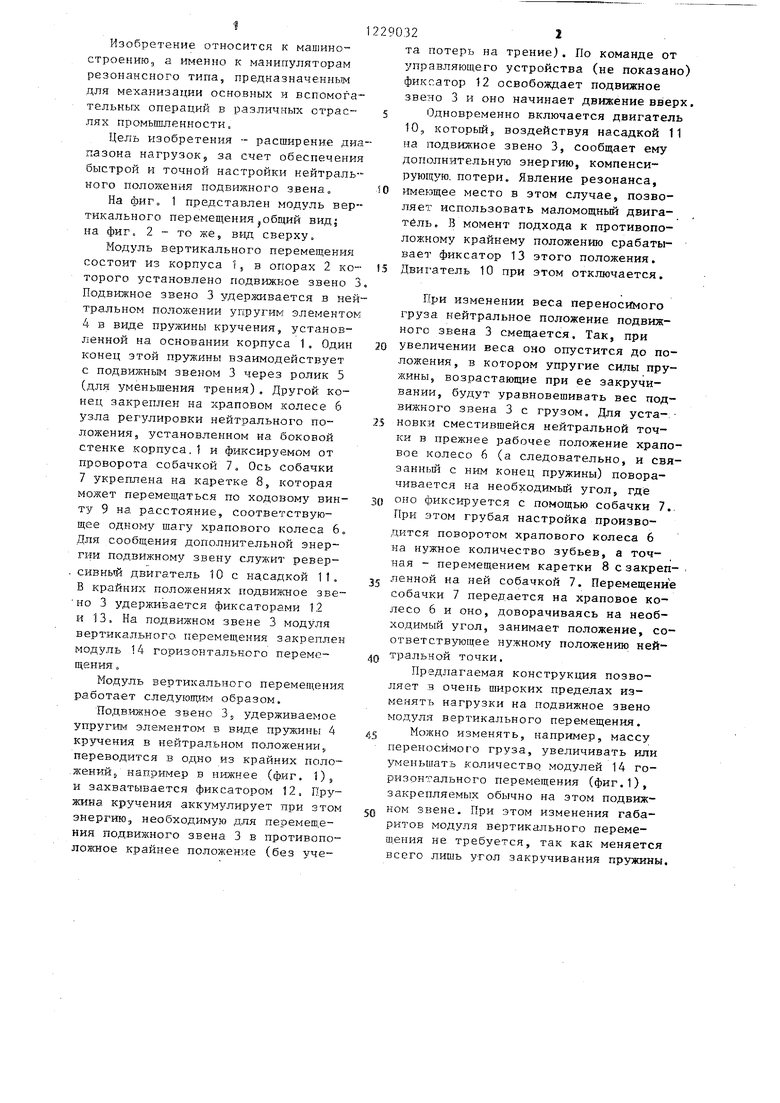
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
| Модуль резонансного манипулятора | 1988 |
|
SU1576304A1 |
| Устройство для глажения волосяного покрова меховых шкур | 1987 |
|
SU1618763A1 |
| Устройство для аварийного торможения каретки подъемника | 1983 |
|
SU1123978A1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2522729C1 |
| МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2150605C1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1710335A1 |
| УСТРОЙСТВО ДЛЯ ФОРМОВАНИЯ БЕТОННЫХ ИЗДЕЛИЙ | 2009 |
|
RU2405672C1 |
| Устройство для гальванической обработки мелких изделий | 1986 |
|
SU1440961A1 |
| Модуль резонансного манипулятора | 1989 |
|
SU1712140A1 |
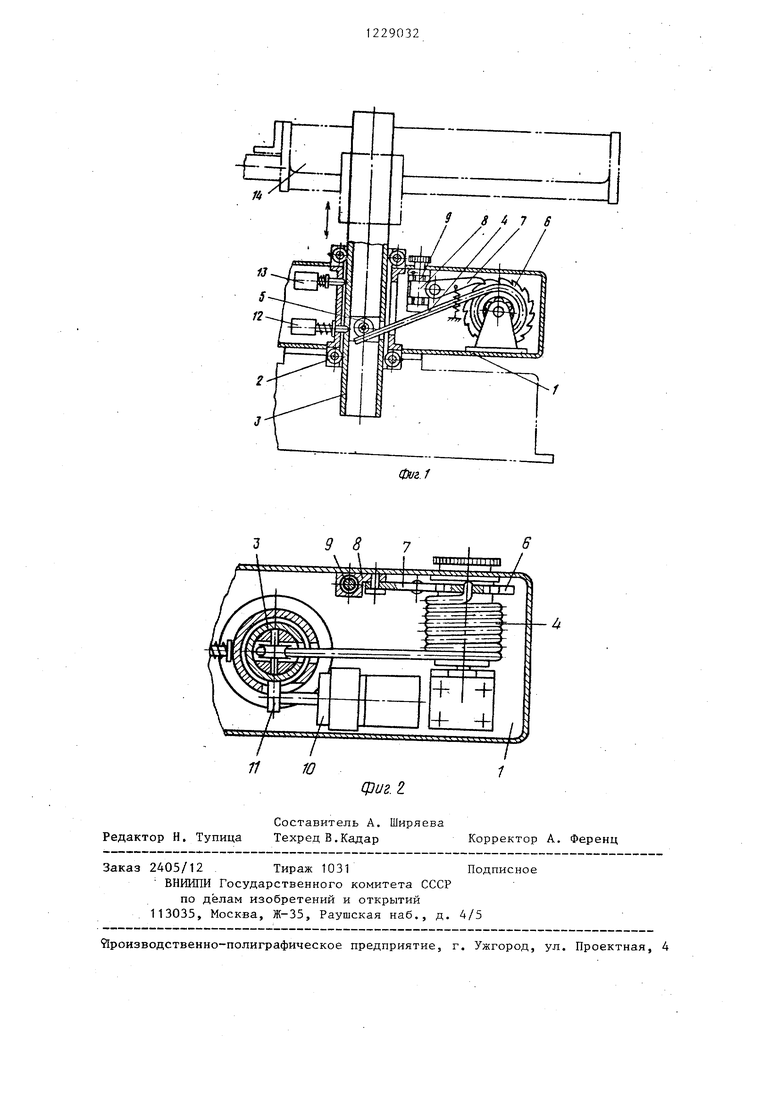
фиг. 2.
Составитель А. Ширяева
Редактор Н. Тупица Техред В.Кадар
Заказ 2405/12 Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор А. Ференц
| Механическая рука | 1975 |
|
SU568346A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
