оо
00 05 4 СП
Изобретение относится к робототехнике и может быть использовано при создании дистанционных манипуляторов.
Целью изобретения является повыше- с ние точности и быстродействия устройства за счет обеспечения мнемонического управле.ния перемещением исполнительного органа по изображению его проекций на экранах мониторов. 10
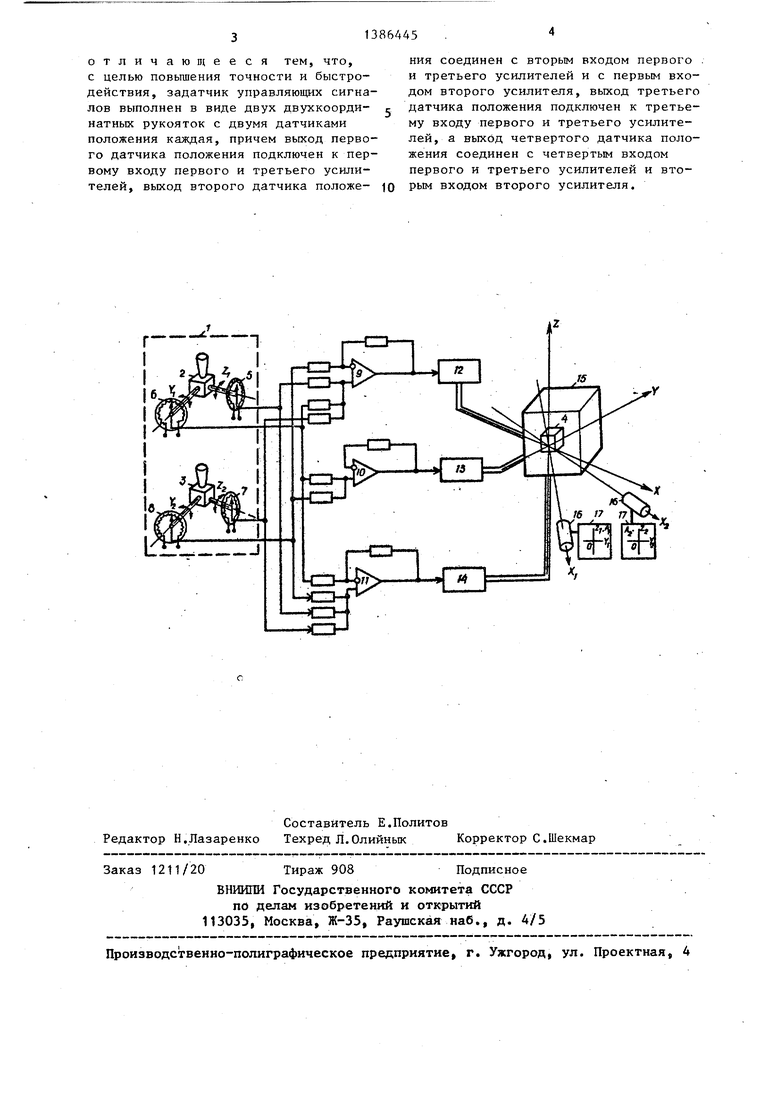
На чертеже представлена функциональная схема устройства.
На схеме устройства представлены задатчик 1 управляющих сигналов, первая и вторая рукоятки 2 и 3 управле- 15 НИН соотве,тственно, предмет 4, с первого по четвертьй датчики 5-8 положения соответственно, с первого по третий усилители 9-11 соответртвен- но, приводы 12 - 14 продольного, по- 20 перечного и вертикаль,ного перемещений, исполнительный орган 15, в.изиры 16, мониторы 17, оси координат X, Y, Z,Y,A,,Y2,Z2.
Устройство работает следующим об- 25 разом.
Оператор в процессе работы видит на экране каждого из мониторов 17 изображение позиционируемого предмета 4, которое проектируется на ось 30 визиров 16. Условия работы манипулятора диктуют расположение визиров 16 таким образом, что их оптические оси Х и X „ совпадают с направлением перемещения исполнительного органа 15 ,с по осям координат X, Y, Z. Зона пересечения оптических лучей определяет зону видимости позиционируемого предмета 4 на экранах мониторов 17, а точка пересечения оптических лучей 40 отмечается на экранах мониторов 17 в виде перекрестия и определяет точку пространства, в которую требуется вывести позиционируемый предмет 4. Таким образом, на экранах каждого из д мониторов 17 видно перемещение позиционируемого предмета 4 по двум координатам Y., Z илиYJ, Z, а совмещение изображения позиционируемого предмета 4 в центре перекрестий на обоих мониторах 17 указывает о его установке в заданной точке пространства,
В общем случае изображение позиционируемого предмета 4 на экранах мониторов 17 занимает произвольное поожение, не совпадающее с центррм экрана, и оператор при помощи задат- ика 1 управляющих сигналов формирует такие воздействия, чтобы скомпенсиро50
55
с 0
5 0
5
0 с 0
0
5
вать полученное отклонение.Задатчик
1управляющих сиг(галов содержит две двухкоординатные рукоятки 2 и 3, которые позволяют оператору смещать их от исходного положения в любую точку рабочей зоны, и два датчика 5, 6 или 7,8. Смещение рукоятки 2 и 3 мнемонического управления приводит к соответствующему развороту взаимно перпендикулярных осей, пропорциональному проекциям вектора смещения pyкoяfoк
2и 3 мнемонического управления на каждую ось координат. Поскольку датчики 5,6 или 7,8, жестко соединены со взаимно перпендикулярными осями двухкоординатных рукояток 2 или 3,
то при их смещении на выходе датчиков 5,6 или 7,8 формируются управляющие сигналы, пропорциональные проекциям вектора смещения на соответствующие оси координат. Так как на экранах мониторов 17 изображение позиционируемого предмета 4 относительно центра экрана представляет собой ошибку наведения, вектор которой может быть спроектирован на оси координат Z,, Y и Z 2, YJ, то оператор при помощи двухкоординатных рукояток 2 и 3 формирует управляющие сигналы для компенсации этой ошибки путем смещения рукояток 2 и 3 в соответствии с величинами и Направлениями векторов ошибок на соответствующих мониторах 17. Так, например, в случае, если изображения позиционируемого предмета 4 на экранах мониторов 17, представленные в виде точек А-t и А., расположены, то оператор рукоятку 2 отклоняет на себя и влево, а рукоятку 3 - на себя и вправо. При этом на дв1-шках датчиков 5, 6 и 7, 8 появляются управляющие сигналы, пропорциональные проекциям перемещения рукояток 2 и 3 на оси Z, Y и Zj,-Y соответственно. Далее управляющие сигналы поступают на масштабно-суммирующие усилители 9 - 11, которые производят решение соответствующего векторного уравнения .
Формула изобретения
Устройство для управления дистанционным манипулятором, содержащее задатчик управляющих сигналов, три усилителя, выходы которых подключены соответственно к входу приводов продольного, поперечного и .вертикального перемещений исполнительного органа.
отличающееся тем, что, с целью повьгаения точности и быстродействия, задатчик управляющих сигналов выполнен в виде двух двухкоорди- натных рукояток с двумя датчиками положения каждая, причем выход первого датчика положения подключен к первому входу первого и третьего усилителей, выход второго датчика положе-
ния соединен с вторым входом первого . и третьего усилителей и с первым входом второго усилителя, выход третьего датчика положения подключен к третьему входу первого и третьего усилителей, а выход четвертого датчика положения соединен с четвертым входом первого и третьего усилителей и вторым входом второго усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СТРОИТЕЛЬНОЙ МАШИНОЙ (ВАРИАНТЫ) | 2009 |
|
RU2399576C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО ПОЛЯ УПРАВЛЕНИЯ ИНФОРМАЦИОННОГО КАНАЛА | 2003 |
|
RU2248534C1 |
| Задающее устройство для дистанционного управления роботом-манипулятором | 1988 |
|
SU1516344A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2478898C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ВОЗДУШНОЙ ЦЕЛИ И ОПТИЧЕСКИЙ ПРИЦЕЛ СО СЛЕДЯЩИМ ДАЛЬНОМЕРОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2549552C2 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| Устройство для имитации движения судна вблизи берега | 1982 |
|
SU1084830A1 |
| Устройство для двухкоординатного управления рабочим органом | 1990 |
|
SU1815620A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ ОПЕРАЦИОННЫМ ЭКЗОСКОПОМ | 2020 |
|
RU2757991C2 |
| Устройство для управления исполнительным механизмом манипулятора | 1983 |
|
SU1282077A1 |
Изобретение относится к области робототехники и может быть использовано при создании дистанционных манипуляторов. Целью изобретения является повьшение точности и быстродействия. Для этого задатчик управляющих сигналов вьтолнен в виде двух двух- координатных рукояток с двумя датчиками положения, которые через суммирующие усилители подключены к приводам продольного, поперечного и вертикального перемещений исполнительно-. го органа манипулятора. Устройство обеспечивает мнемоническое управление перемещением исполнительного -органа манипулятора по изображению его проекций на экранах мониторов. 1 ил.
| Устройство для разрушения мочевых и желчных камней в организме человека | 1982 |
|
SU1114409A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
| Устройство для управления манипулятором | 1982 |
|
SU1084725A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
