-/
Х
W
с
-X
СП
00
«
Фй г/
длимые точки рабочего пространства, например при выполнении транспортных операций, при программировании робо- методом от точки к точке. Целью изобретения является повышение произ- подительности и снижение трудоемкости путем уменьшения числа управляющих воздействий при сохранении количества одновременно управляемых степеней подвижности. Лля перемещения рабочего органа по координатам X или Y или для одновременного перемещения по двум этим координатам оператор движением руки с помощью рукоятки 1
отклоняет стержень 7, находя1Щ1Йся в продольных пазах дугообразных скоб 6, оси поворота которых взаимно пер- пендикулярны. При этом происходит поворот задатчиков 9 регулируемой координаты, связанных с концами скоб 6 через мультипликаторы 8. Для перемещения рабочего органа по координате
Z оператор нажимает на рукоятке 1 один из выключателей 5, подключая выходное напряжение задатчиков 4 к системе управления, и поворачивает рычаг 2, ось которого связана с задатчиками 4с 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Задающее устройство для управления роботом-манипулятором | 1986 |
|
SU1348167A1 |
| Задающее устройство для дистанционного управления роботом - манипулятором | 1991 |
|
SU1825730A1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| Задающий орган манипулятора | 1986 |
|
SU1393619A1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| Устройство для обучения управлению подвижными объектами с помощью джойстиков | 2019 |
|
RU2724939C1 |
| Тренажёр для вейкборда | 2022 |
|
RU2772192C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
Изобретение относится к машиностроению, в частности к задающим устройствам роботов-манипуляторов с дистанционным управлением, и может быть использовано для ручного управления скоростью перемещения рабочих органов роботов-манипуляторов в заданные точки рабочего пространства, например при выполнении транспортных операций, при программировании роботов методом от точки к точке. Целью изобретения является повышение производительности и снижение трудоемкости путем уменьшения числа управляющих воздействий при сохранении количества одновременно управляемых степеней подвижности. Перемещение рабочего органа по координатам X или Y, или для одновременного перемещения по двум этим координатам оператор движением руки с помощью рукоятки 1 отклоняет стержень 7, находящийся в продольных пазах дугообразных скоб 6, оси поворота которых взаимно перпендикулярны. При этом происходит поворот задатчиков 9 регулируемой координаты, связанных с концами скоб 6 через мультипликаторы 8. Для перемещения рабочего органа по координате Z оператор нажимает на рукоятке 1 один из выключателей 5, подключая выходное напряжение задатчиков 4 к системе управления, и поворачивает рычаг 2, ось которого связана с задатчиками 4. 2 ил.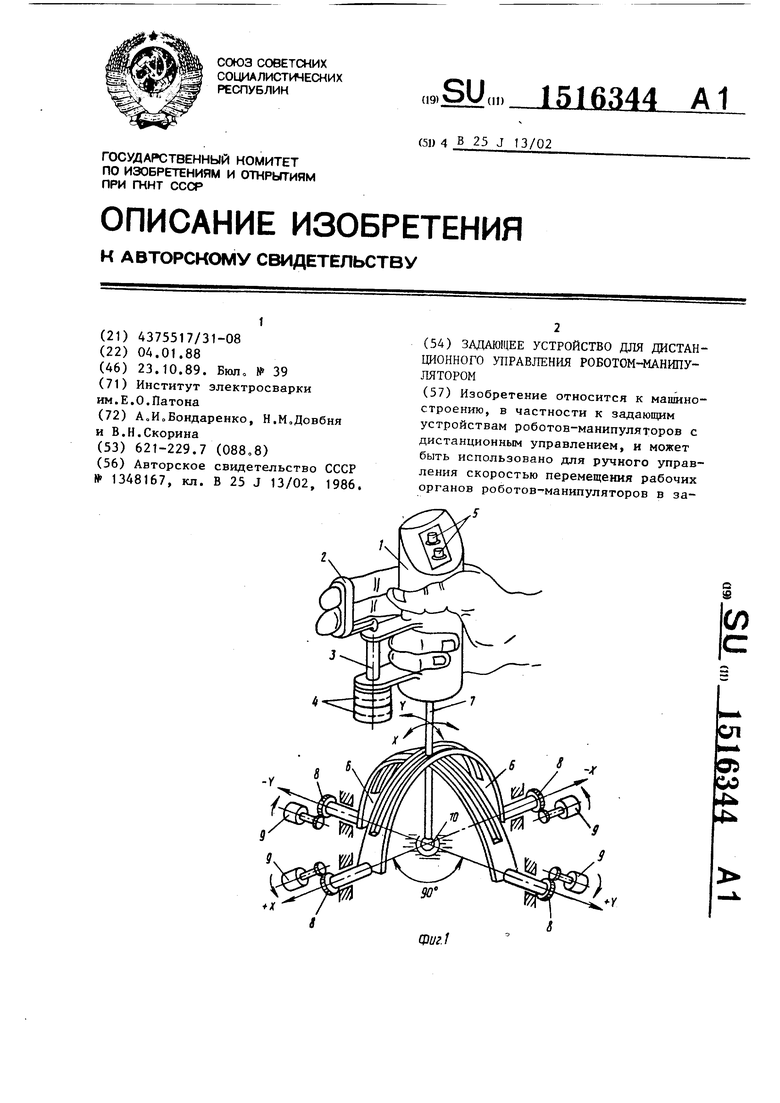
Изобретение относится к машиностроению, в частности к задающим устройствам роботов-манипуляторов с дис- танцион)1ым управлением, и может быть использовано для ручного управления скоростью перемещения рабочих органов роботов-манипуляторов в заданные точки рабочего пространства, например, при выполнении транспортных операций, при программировании роботов методом от точки к точке.
Цель изобретения - повышение производительности и снижение трудоемкости путем уменьшения числа управля- воздействий при сохранении количества одновременно управляемых степеней подвижности.
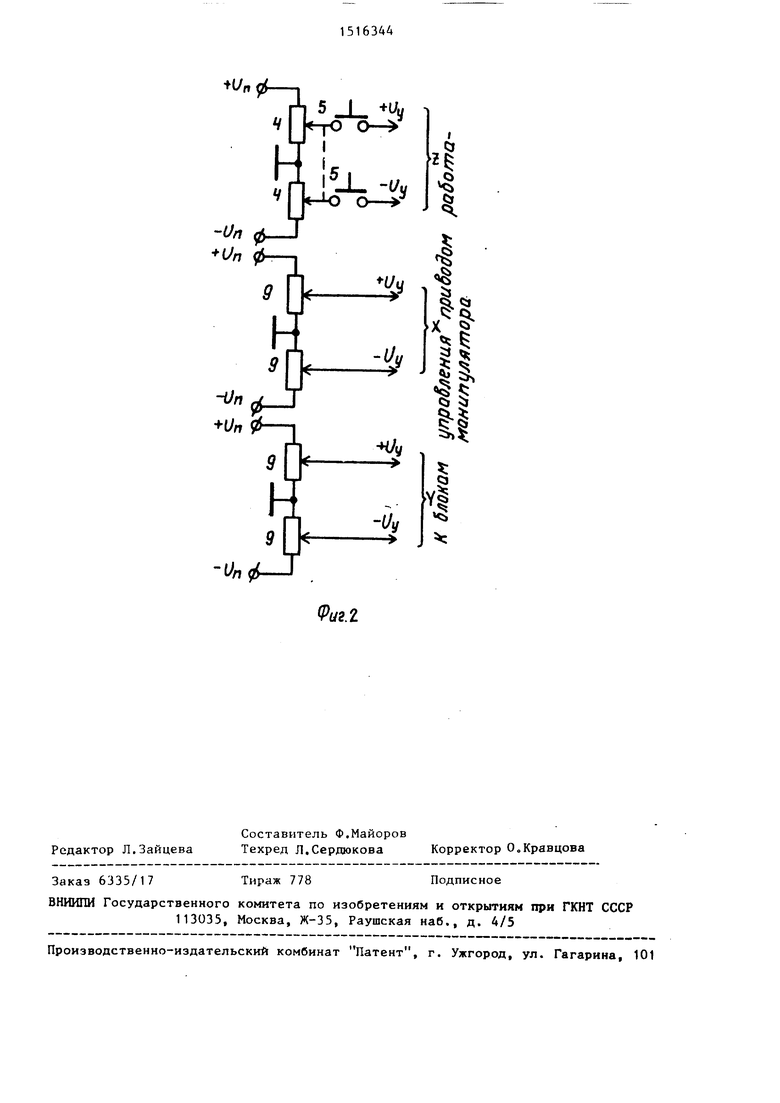
На фнг.1 изображено задающее устройство, общ1;й вид; на фиг. 2 - схема подключения задатчиков регулируемой координаты к роботу-манипулятору.
Задающее устройство содержит рукоятку 1, рычаг 2, ось 3, два задат- чика 4 скорости регулируемой координаты, установленные на рукоятке два однополюсных выключателя 5, две дугообразные скобы 6 с продольными пазами, ;тержень 7, четыре мультипликатора 8, четьфе задатчика 9 регулируемой координаты. Стержень 7 расположен в пазах скоб и одним концом посредством шарнира 10 связан с основанием.
Устройство работает следующим образом.
Для перемещения рабочего органа робота по одной из координат X или Y в требуемом направлении оператор
0
с помощью рукоятки 1 смещает стержень 7 по пазу одной из скоб 6. При этом вторая скоба 6, ось поворота
5 которой расположена под углом 90 к оси поворота первой скобы, начинает поворачиваться в одном или .другом направлении. С концами скоб 6 через элементы зацепления связаны мультипликаторы 8, которые передают вращательное движение скобы 6 на ось поворота соответствующих задатчиков 9 регулируемой координаты в зависимости от направления смещения стержня 7. Передаточные числа мультипликаторов
- 8 выбираются таким образом, чтобы при максимальном отклонении стержня 7 в пазах скоб 6, которое равно примерно 75 , оси задатчиков 9 поворачивались на полный угол. Выходное напряжение ULI задатчика 9, величина которого зависит от угла их поворота, поступает на блоки управления приводом робота, в результате чего обеспечивается пе0
ремещение рабочего органа робота по
требуемой координате с соответствующей скоростью и в заданном направлении о
При необходимости перемещения рабочего органа робота одновременно по координатам X и Y оператор одним движением руки отклоняет с помощью рукоятки 1 стержень 7 в любом направлении. При этом выходные сигналы формируются двумя задатчиками 9 регулируемой координаты. Величины сигналов зависят от угла отклонения стержня 7 и от места расположения
515
этого стержня в плоскости заданного квадранта.
Для перемещения рабочего органа по третьей координате в требуемом направлении оператор на рукоятке 1 боль ршм пальцем руки нажимает один из однополюсных выключателей 5, подключая выходное напряжение Un за- датчиков 4 регулируемой координаты к блоку управления приводом робота по координате Z (фиг. 2)-. Затем оператор осуществляет поворот рычага 2 с осью 3, с которой жестко связаны роторы задатчиков 4. Это приводит к изменению величины сигнала на выходе задатчиков А, в результате чего рабочий орган робота движется с соответствующей скоростью и заданном направлении по координате Z.
Формула изобретения
Задающее устройство для дистанционного управления роботом-манипулятором, содержащее кинематически связанную с основанием рукоятку, имеющую рычаг, ось вращения которого совпадает с осью поворота пальцев оператора в суставах между второй и третьей фалангами, два расположенные
3446
на оси рычага задатчика регулируемо) координаты и два выключателя, установленные на рукоятке с нормально разомкнутыми контактами, отличающееся тем, что, с целью повышения производительности и снижения трудоемкости путем уменьшения числа управляющих воздействий при
10 сохранении количества одновременно управляемых степеней подвижности робота-манипулятора, он снабжен че- тьфьмя дополнительными задатчиками регулируемой координаты и четырьмя
15 мультипликаторами, а кинематическая связь рукоятки с основанием выполнена в виде двух расположенных на основании с возможностью поворота вокруг взаимно перпендикулярных осей
20 дугообразных скоб с продольными пазами и стержня, расположенного в этих пазах, один конец которого шар- нирно связан с основанием, а другой закреплен на рукоятке, при зтом кон25 цы скоб связаны через мультипликаторы с соответствующими дополнительныо
МИ задатчиками регулируемой координаты, выходы которых непосредственно связаны с роботом-манипулятором, а 30 задатчики, расположенные на рукоятке, , связаны с роботом-манипулятором через контакты выключателей.
НУг
-Un
Редактор Л.Зайцева
Составитель Ф.Майоров Техред Л.Сердюкова
Заказ 6335/17
Тираж 778
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Корректор О.Кравцова
Подписное
| Задающее устройство для управления роботом-манипулятором | 1986 |
|
SU1348167A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
