Изобретение относится к системам автоматического управления с эталонной моделью и может найти примененке при управлении, например, технологи ческими объектами в химической, неф техимичёской, мета.гшургической и других отраслях промышленности.
Целью изобретения является повышение устойчивости и точности сксте- мы в условиях нестационарных характеристик объекта управления.
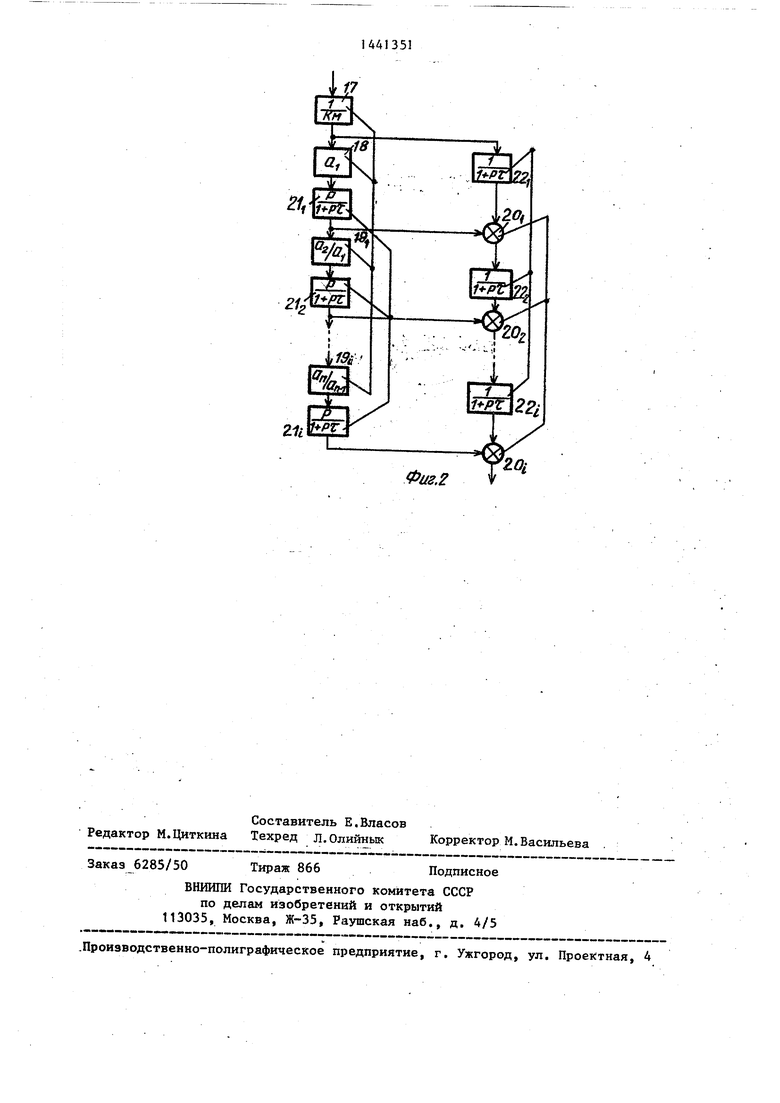
На фиг. 1 представлена структурная схема адаптивной системы автоматического управления; на фиг. -2 - структурная схема обратной модели объекта.
Адапативная система автоматического управления -содерзкит (фиг.1) первый сумматор 1, регулятор 2, второй сумматор 3, модель 4 объекта, третий сумматор 5, обратную модель 6 объекг- та, корректирующий блок 7, первый бдок умножения 8, объект управления 9, форсирующий блок 10, второй блок умножения 11, интегратор 12, четвертый сумматор 13, третий блок умножения 14, блок деления 15,. усилитель 16. Обратная модель объекта содержит Усилители 17,185 19,-19;, сумматоры , дифференцирующие звенья 21,,
21,;, инерционные звенья 22 ,-22., (фиг. 2).
Система управления работает еле- дующим образом.
На первый вход сумматора. 1 посту- пает сигяал задания, а на второй инверсно подается выходной сигнал объекта. Получающийся на выходе cyi-i- матора 1 сигнал рассогласования по- ступает .на вход регулятора 2,, на вы ходе которого формируется управляющее воздействие регулятора, которое подается на первый вход сумматора 3 на второй вход которого с лока умно жения Н постзшает сигнал f, числен- но равный внешнему неконтролируемог-гу возмущению f с обратным знаком, щзи веденному к входу объекта 9э в результате на выходе сумматора 3 получается управляющее воздействие U,, которое подается на вход модели объекта 4 и на вход блока умножения 8, на другой вход которого поступает сигнал, численно равньй коэффициенту самонастройки K(.(t), удовлетворяюще;-; му условию Ko(t) K-t(t) где K(t) и К„д коэффициенты усиления объекта и модели объекта., и обеспечивающему, таким образом, постоянство коэффициента передачи сис.темы по каналу управления в условиях, когда коэффициент усиления объекта может изменяться в широких пределах.
Выходной сигнал модели 4 подается на вход сумматора 5,. а выходной сигнал объекта 9 инверсно подается на другой вход сумматора 5, на выходе которого получается сигнал рассогла еования между выходами модели 4 и объекта 9, который поступает на входы обратной модели б и форсирующего блока 10, На Бь-ходе обратной модели 6 получается сигнал, равный некоторому эквиваленту внешнего неконтролируемого и параметрического возмущения, приведенному к входу объекта. Проходя через корректирующий блок 7, вых.одной сигнал .обратной модели б подвергается в нем фильтрации и поступает на блок множения 14, на второй вход которого подается выходной сигнал сумматора 13, равный коэффициенту самонастройки К, в результате на выходе блока умнслсения 14 по- лучается сигнал, приблизительно равный по величине и обратный по знаку внешиег у неконтролируемому вoз ryщe- ншо, Таккн образом, .в блоке умножв ния 14 осуществляется выделение из эквивалента внешнего ргеконтролируе- мого возщтцения и параметрического возмущения только внешнего неконтролируемого возм:/щения (с обратным знаком) . Такш-5 образом, на сумматоре 3 осуществляется компенсация неконтролируемого возмущения путем сложения вьгходного сигнала регулятора 2 и выходного сигнала блока умнокения 14. С выхода блока уг.шожения 14 сигнал поступает также на вход делимого блока деления 15 на вход делителя которого подается выходной сигнал U су1Ф;атора 3, в результате на выходе Яблока 15 получается сигнал, равный отношению г/и, который подается на вход сумматора 13, на другой вход которого подается выходной сигнал интегратора 12, равный по величине
- интегралу от произведения (получаемого на выходе блока умножения 11) сигнала згаравления U (вьгеода .- тора 3), сигнала, пропорционального
. сигналу самонастройки (выхода ус11яи- теля 16, на вход которого подается выходной сигнал сумматора 13) и выходного сигнала форсирующего блока
10. В результате .на выходе сумматора 13 получается сигнал самонастройки коэффициента усиления канала управления системы, который в блоке умножения 8 используется для стабилиэа- ции коэффициента усиления канала управления системы.
В системе помимо быстродействукэдей сигнальной цепи самонастройки, вклю- |Q чающей модель 4 объекта, 5, обратную модель 6, корректирующий блок 7 и cymtarop 3, действует цепь параметрической самонастройки, вкшо- чагощая блок деления 15, блоки умно- is жения 8,11 и 14, усилитель 16, форсирующий блок 10 и сумматор t3, которая реализует самонастройку коэффициента усиления системы в широких пределах. Это позволяет значительно рас-20 ширить область устойчивости системы и повысить ее точность в условиях нестационарности объекта управления и воздействия на него неконтролируе- Mbix возмущений, 25
Формула изобретения
Адаптивная система автоматического управления, содержащая первый сумматор первый вход которого соединен с 30 входом задания системы, а выход - с входом регулятора, подключенного вьг- одом к первому входу второго сумма- Topa, объект згаравления, выход кото- ого соединен с вторым входом перво- 35 го сумматора и с первым входом треть- его сумматора, второй вход которого
1441351
подключен к выходу модели объекта, обратную модель объекта, выход которой соединен с входом корректирующего блока, и четвертый сумматор, отличающаяся тем, что, с целью повышения устойчивости и точнос- ти системы в условиях нестационарных характеристик объекта управления, в нее введены три блока умножения, усилитель, блок деления, интегратор и форсирующий блок, вход которого сое- |динен с входом обратной модели объек та и с выходом TpieTbero сумматора, |выход второго сумматора подключен к входу делителя блока деления, к пер- ;ВОму входу первого блока умножения, :К входу модели объекта и к .первому входу второго блока умножения, вто- фой вход которого соединен с выходом усилителя, подключенного входом к второму входу первого блока умножения, к выходу четвертого сумматора и к первому входу третьего блока умножения, второй вход которого соединен с выходом корректирующего блока, а выход - с вторым входом второго сум- матора и с входом делимого блока деления, подключенного выходом к перво :му входу четвертого сумматора, второй вход которого соединен с выходом интегратора, подключенного входом к выходу второго блока умножения, третий вход которого соединен с выходом форсирующего блока, выход первого блока умножения подключен к входу объекта управления.
Фиг.2
т
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1986 |
|
SU1409971A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1388826A2 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1386957A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2013 |
|
RU2541848C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Система автоматического управления | 1982 |
|
SU1113780A2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
Изобретение относится к системам автоматического управления с эталонной моделью и может найти применение при управлении технологическими объектами. Целью изобретения является повышение устойчивости и точности системы в условиях нестационарных характеристик объекта управления. Система содерясит сумматоры 1,3,5,13, регулятор 2, модель 4 объекта, обратную модель 6 объекта, корректирующий блок 7, блоки умножения 8,11,14, объект управления 9, форсирующий блок 10, интегратор 12, блок деления 15, уси- , литель 16. В системе действуют сигнальная и параметрическая самонастройки, что позволяет расширить область устойчивости системы и повысить ее точность в условиях нестационарности объекта управления и воздействия на нето неконтролируемых возмущений. 2 ил. (Л
| Система автоматического управления | 1977 |
|
SU591821A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система автоматического управления | 1979 |
|
SU824142A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
