(21)3876235/27-11
(22)06.02„85
(46)15.04.88. Бкш. № 14
(75)Н.Н.Калашников
(53)621.331 (088,8)
(56)Патент ОНА № 4129203, кл. В 60 L 5/40, 1978.
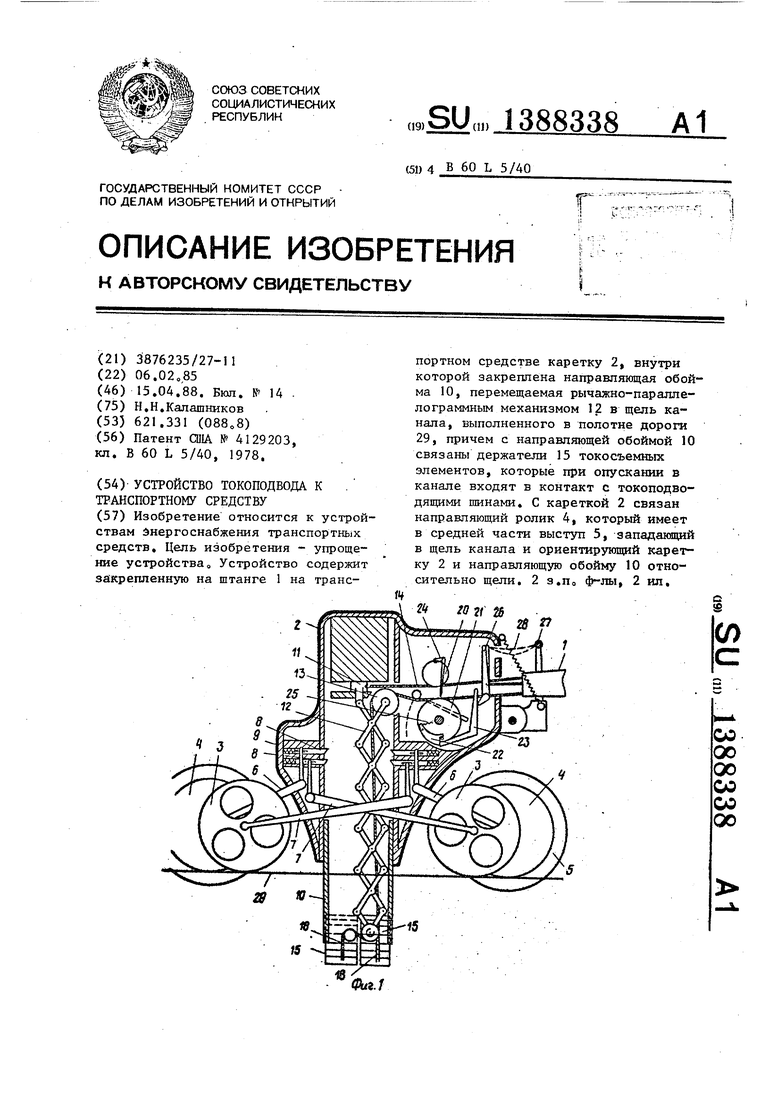
(54)- УСТРОЙСТВО ТОКОПОДВОДА К . ТРАНСПОРТНОМУ СРЕДСТВУ
(57)Изобретение относится к устройствам Энергоснабжения транспортных средств. Цель изобретения - упрощение устройства о Устройство содержит загкрепленную на штанге 1 на транспортном средстве каретку 2, внутри которой закреплена направляющая обойма 10, перемещаемая рычажно-паралле- лограммным механизмом 12 в щель канала, выполненного в полотне дороги 29, причем с направляющей обоймой 10 связаны держатели 15 токосъемных элементов, которые при опускании в канале входят в контакт с токоподво- дящими шинами. С кареткой 2 связан направляющий ролик 4, который имеет в средней части выступ 5, западамций в щель канала и ориентирующий каретку 2 и направляющую обойму 10 относительно щели. 2 з.По ф-лы, 2 ил.
го V W
ГУ
i
(Л
оо
00 00
со
00 00
Фиг.1
10
11388338
Изобретение относится к устройствам энергоснабжения транспортных средств о
Цель изобретения - повышение бе- . зопасности.
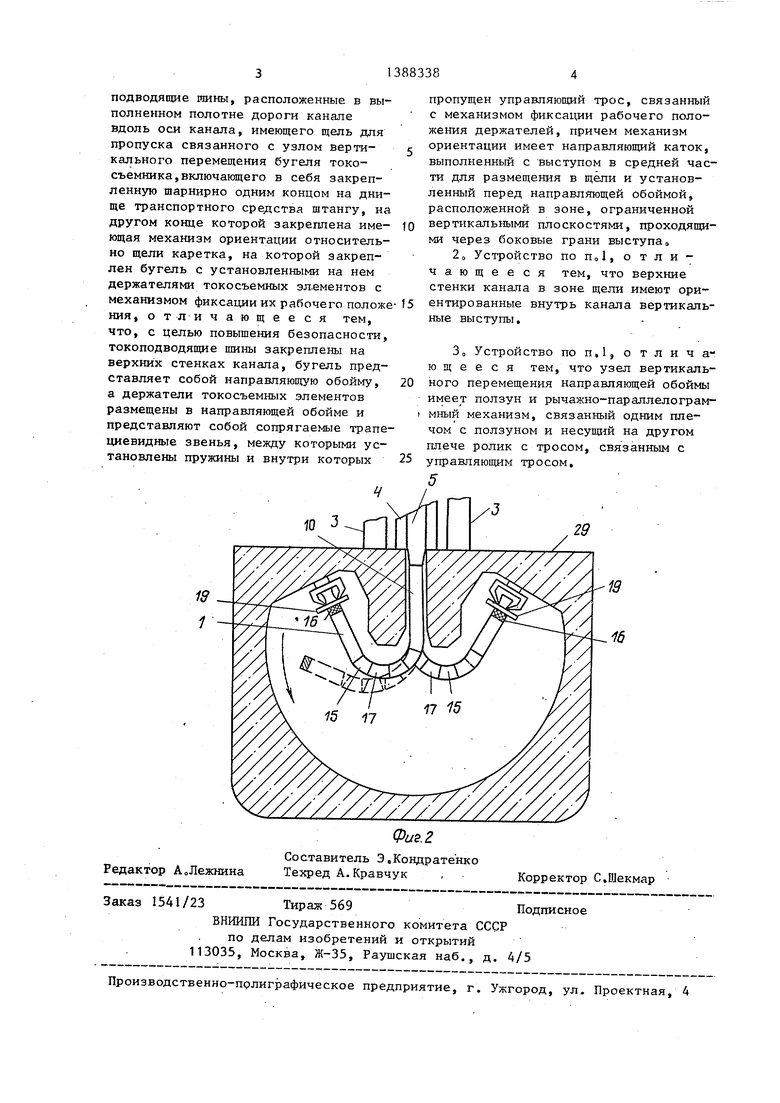
На фиг.1 изображено предлагаемое устройство, общий вид; на фиг.2 - канал с токосъемником, поперечное сечение о
Устройство токоподвода содержит закрепленную шарнирно одним концом на днище транспортного средства штант гу 1, на другом конце которой закреплена каретка 2, с которой связан механизм ориентации, имеюпщй опорные 3 и направляющие 4 катки. Направляющие катки 4 выполнены с выступом 5. Катки 3 и 4 рычагами 6 и 7 связаны с защелками 8 и 9 на корпусе каретки 2, внутри которой размещена направляющая обойма 10, связанная с узлом вертикального перемещения, который имеет ползун 11 и рычажно-па- раллелограммный механизм 12, связанный одним плечом с ползуном 11 и несущий на другом плече ролик 13, через который пропущен трос 14, Механизм 12 связан с держателями 15 то- косъемных элементов 16, представляю- щими собой сопрягаемые трапециевидные звенья 17, внутри которых пропущен .управляющий трос 18, связанный с тросом 14 узла вертикального пересовой стрелки. Для предотвращения . проскальзывания трос 14 ьшглухо закреплен в одной из точек канавки роли ка. Вместе с вращением ролика 20 . ползун 11, связанный с тросом 14, скользит слева направо. Однако направляющая обойма 10 начнет перемещение вниз, в щель канала,только тогда когда катки 4 попадут выступами 5 в щель, а катки 3 упрутся в полотно до роги, т,е. когда направляющая обойма 10, размещенная за катком 4 в пространстве, ограниченном вертикальными
15 плоскостями, проходящими через боковые грани выступа 5, окажется строго над створом щели Только тогда рукоятка пойдет дальше, а рычажно-парап- лелограммный механизм 12 продвинет
20 обойму 10 вместе с держателями 15 в щель. Затем при натяжении управляющего троса 18 держатели 15 изогнутся и примут рабочее положение (фиг,2), В держателях имеются пружины, под
25 действием которых при ослаблении натяжения троса 18 держатели распрямляются. Рабочее положение держателей 15 фиксируется кулачком 22 и рычагом 23, При доведении рукоятки до упора ролик 21 с кулачком 22 возвращается в исходное положение, натяжение связанного с ним троса 14 падает, а повернувшийся кулачок 22 освобождает стремящуюся под действием пружин
мещения. Держатели 15 в рабочем поло- 35 штангу с кареткой, что приво- жешш опущены в канал, в котором на/ит к возрастанию сил, прижимающих
верхних его стенках закреплены токо- токосъемные элементы 16 к шинам 19,
0
совой стрелки. Для предотвращения . проскальзывания трос 14 ьшглухо закреплен в одной из точек канавки ролика. Вместе с вращением ролика 20 . ползун 11, связанный с тросом 14, скользит слева направо. Однако направляющая обойма 10 начнет перемещение вниз, в щель канала,только тогда, когда катки 4 попадут выступами 5 в щель, а катки 3 упрутся в полотно дороги, т,е. когда направляющая обойма 10, размещенная за катком 4 в пространстве, ограниченном вертикальными
5 плоскостями, проходящими через боковые грани выступа 5, окажется строго над створом щели Только тогда рукоятка пойдет дальше, а рычажно-парап- лелограммный механизм 12 продвинет
0 обойму 10 вместе с держателями 15 в щель. Затем при натяжении управляющего троса 18 держатели 15 изогнутся и примут рабочее положение (фиг,2), В держателях имеются пружины, под
5 действием которых при ослаблении натяжения троса 18 держатели распрямляются. Рабочее положение держателей 15 фиксируется кулачком 22 и рычагом 23, При доведении рукоятки до упора ролик 21 с кулачком 22 возвращается в исходное положение, натяжение связанного с ним троса 14 падает, а повернувшийся кулачок 22 освобождает стремящуюся под действием пружин
| название | год | авторы | номер документа |
|---|---|---|---|
| Штанговый токоприемник | 1976 |
|
SU770868A1 |
| Протаскивающее устройство машины для обрезки сучьев | 1977 |
|
SU649580A1 |
| Токоприемник безрельсового транспортного средства | 1988 |
|
SU1588581A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1523154A1 |
| ПРИСТАВКА ДЛЯ НАПЛАВКИ ОТВЕРСТИЙ МАЛЫХ ДИАМЕТРОВ | 2003 |
|
RU2256539C2 |
| Устройство для установки клиньев в пазы якорей электрических машин | 1980 |
|
SU920969A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОГО ОТДЕЛЕНИЯ ОТ СТОПЫ И ВЫДАЧИ ГАЗЕТ И ТОМУ ПОДОБНЫХ ЛИСТОВЫХ ИЗДЕЛИЙ | 2002 |
|
RU2210113C1 |
| УСТРОЙСТВО ДЛЯ САМОВЫТАСКИВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ГУСЕНИЧНЫМ ДВИЖИТЕЛЕМ | 1993 |
|
RU2037447C1 |
| Автоматическая линия для изготовления арматурных каркасов | 1984 |
|
SU1337176A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
подводяпще шины 19, Трос 14 связан с рукояткой управления (не показана) через механизм фиксации рабочего положения держателей 15, который имеет ролики 20 и 21, кулачок 22, рычаги 23 и 24 и пружирту 25, причем с рычагом 23 связаны рычаги 26 и 27, последний из которых закреплен на штанге 1 , а между рычагами 26 и 27 имеется цепочка 28,
Устройство работает следующим образом.
При выезде автомобиля на прямой участок дороги к намерении подсоединиться к шинам 19 водитель транспортного средства перемещает рукоятку
управления на себя, натягивая трос 14, и штанга 1 с кареткой 2 опускает- ся до упора катков 3 и 4 в полотно дороги 29. Натяжение троса 14, перекинутого через ролик 20, заставляет последний поворачиваться против ча-.
При подъеме штанги рычаг 26 перемещает рычаг 23, который освобождает кулачок 22, а ролик 21 под действием пружины 25 поворачивается в исходное положение, ослабляя натяжение троса 14, Затем кулачок 22 входит в зацепление с рычагом 23 и освобозадает ролик 20, последний поворачивается в исходное положение, перемещается ползун 11, поднимается механизм 12, Автоматическое отсоединение от шин 19 при отходе штанги 1 от щели
происходит при натяжении цепочки 28 от перемещения вместе со штангой 1 рычага 27, в результате чего повора- чивается рычаг 26, освобождая рычаг 23,
Формула И зобре тения
1 о Устройство токоподвода к транст портному средству, содержащее токоподводящие шины, расположенные в выполненном полотне дороги канапе вдоль оси канала, имеющего щель для пропуска связанного с узлом верти- кального перемещения бугеля токосъемника, включающего в себя закрепленную шарнирно одним концом на днище транспортного средства штангу, на другом конце которой закреплена име- ющая механизм ориентации относительно щели каретка, на которой закреплен бугель с установленными на нем держателями токосъемных элементов с механизмом фиксации их рабочего положе ния, отличающееся тем, что, с целью повыщения безопасности, токоподводяпсие шины закреплены на верхних стенках канала, бугель представляет собой направляющую обойму, а держатели токосъемных элементов размещены в направляющей обойме и представляют собой сопрягаемые трапециевидные звенья, между которыми установлены пружины и внутри которых
ропущен управляющий трос, связанный с механизмом фиксации рабочего полоения держателей, причем механизм ориентации имеет направляющий каток, выполненный с выступом в средней части для размещения в щели и установленный перед направляющей обоймой, расположенной в зоне, ограниченной вертикальными плоскостями, проходящими через боковые грани выступа о
2о Устройство по По1, о т л и - чающееся тем, что верхние стенки канала в зоне щели имеют ориентированные внутрь канала вертикальные выступы.
Зо Устройство по п.1, о т л и ч а- ю щ е е с я тем, что узел вертикального перемещения направляющей обоймы имеет ползун и рычажно-параллелограм- мный механизм, связанный одним плечом с ползуном и несущий на другом плече ролик с тросом, связанным с управляющим тросом,
5
29
