Изобретение относится к устройствам для отключения и повторного подключения токосъемника транспортных средств к контактному проводнику и касается автоматизации управления пе-. редачи энергии проводника, размещенного в дорожном покрытии, к транспортному средству
Цель изобретения - повышение маневренности путем обеспечения автоматического подъема и опускания штанги.
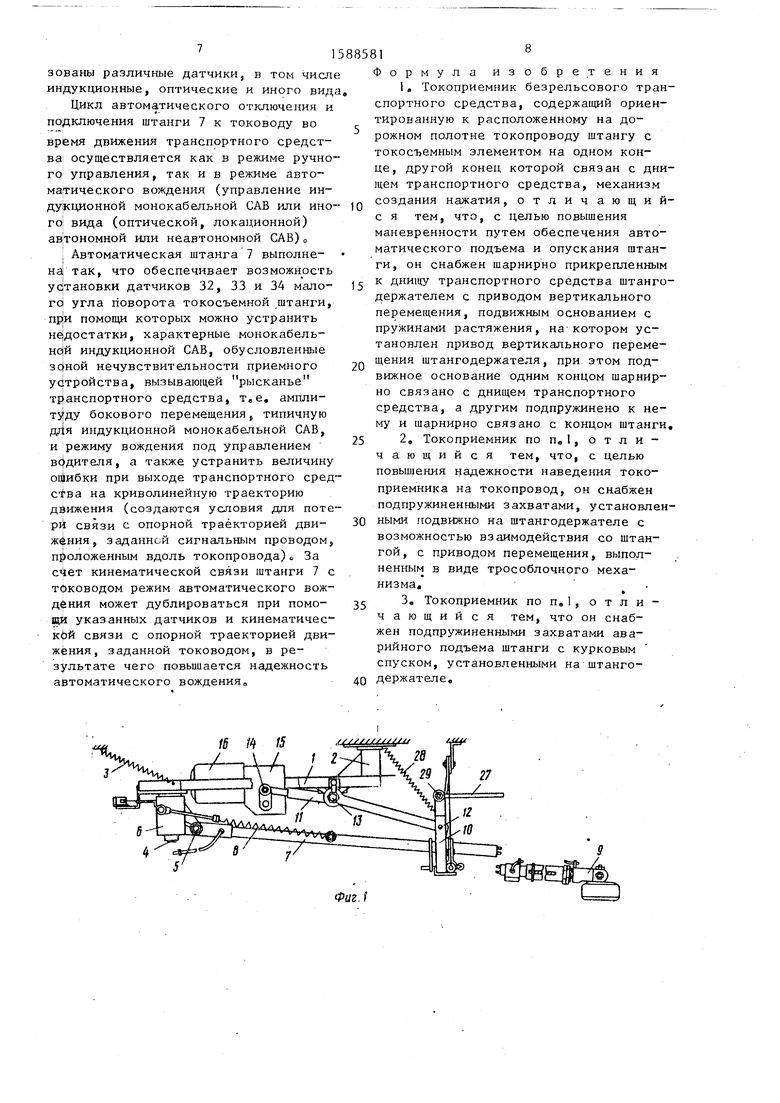
На фигоI изображен токоприемник, вид сбоку; на фйго2 - штангодержатель с захватами; на фигоЗ - то же, вид сверху.
Устройство содержит корпус 1, шар- нирно закрепленный на транспортном средстве при помощи узла 2 крепления.
. Корпус 1 сориентирован вдоль продольной оси транспортного средства пружинами 3 растяжения, К корпусу 1 с помощью осей 4 и 5 шарнирного узла 6 прикреплена токосъемная штанга 7 с пружинами 8 растяжения, заканчивающаяся токосъемным элементом 9,Штанга 7 пропущена внутри штангодержателя JO, выполненного в виде трапециевидной рамки, имеющей кинематическую связь через систему рычагов II и осей 12, 13 и 14 с червячным редуктором 15 и электродвигателем 16,
Штангодержатель 10 предназначен для автоматического (или ручного) подъема токосъемной штанги 7 с целью прекращения контактирования с тоководом при выполнении маневра поворо№
00
ел
эо
31
та, прекраи1;ении подачи энергии (ко- |нец токовода, повреждение токовода, токоприемника) и ТвД, ориентации токосъемной штанги по профильной оси транспортного средства, фиксации ее в -нерабочем положении (по продольной оси транспортного средства и не ниже дорожного просвета) и для опускания (сброса) токосъемной штанги для контактирования с тоководом при созда- :нии соответствующих условий, ; Штангодержатель 10 включает в се- :бя трубчатое основание 17 с продоль- ; ными пазамИо Внутри основания разме- Чцены ползуны 18 с захватами 19, выхо :дящими в верхние пазыа Ползуны 18 jчерез продольные пазы соединены меж- ;ду собой с одной стороны упругими эл ;ментами, пружинами 20 растяжения, а с другой тросами 21, проходящими по направляющим блокам 22 и 23. Блоки 23 закреплены на транспортном средстве. Другие концы тросов соединены с регулировочным узлом 24ci На основании 7 закреплен автоматический аварийный механический штангоуловитель, :имеющий захваты 25 и пружины 26 с храповым или курковым спуском (не :показан),,Штангодержатель Ю снабжен ;дублирующим ручным приводом, состоя- :щим из рычагов 27 и пружин 28 растя- :жениЯо Штангодержатель 10 может под действием пружин 28 и рычагов 27, за /крепленных на осях. 29, ограниченно п :ворачиваться вокруг оси 12 На оси
13 установлены датчики (измеритель- ные преобразователи) 30 и 31 верти- к ального положения штангодержателя 10 (при необходимости устанавливается датчик средне го положения штангодержателя по вертикали),., Датчики 32 и 33 фиксируют малые углы отклонения оси токосъемной штанги от проекции продольной оси транспортного средства при отклонении его от заданной тоководом траектории движения для автоматического рулевого управлениЯо На шарнирном узле 6 и корпусе i установлен датчик 34. фиксирующий совмещение оси токосъемной штанги с про дольной осью транспортного средства Аналогично датчикам 32 и 33 установлены идентичные датчики 35 и 36,
Устройство работает cлeдyюш м образоме
Дця автоматического подключения токосъемной штанги 7 к тяговозарядно сети во время движения под управле
.
10
15
20
25
-
й
30
35
40
45
50
55
нием водителя ориентация 1итанги осуществляется путем ориентации транспортного средства на основе законо- мерности непрямолинейного движения пневмоколесных транспортных средств с рулевым управлением относительно заданной траектории движенияо Б результате амплитуда бокового перемещения транспортного средства относительно оси заданной траектории движения , проекция, оси токосъемной штанги и проекция продольной оси транспортного средства многократно совпадают с осью траектории сигнального провода и токовода В датчиках (антеннах) и системе автоматического управления ориентацией токосъемной штанги, включающей в себя ивдукционную монокабельную систему автоматического вождения (САВ) или иную (например, оптическую САБ с соответствую1дими датчиками), в датчиках (не показаны) формируется сигнал, поступающий в электронный блок, преобразуемый затем в управляющий импульс доя запуска привода штангодержателя- 10, Б результате электродвигатель 16 через редуктор 15 и рычаги 11 опускает Штангодержатель 10, Под действием натяжения тросов 21 ползуны 18 перемещаются от середи основания 17, а захваты 19 освобождают штангу. При входе токосъемника в контакт с тоководом штанга 7 теряет связь со штангодержателем 10, последний продолжает опускаться, пока не поступит сигнал от датчика фиксирующего, что Штангодержатель 10 достиг нижнего рабочего положения, обеспечивающего условия свободы перемещения токосъемной штанги в горизонтальной и вертикальной плоскости в корпусе штангодержателя 10, и сигнал от датчика внешней сети (не показан) о том, что токосъемник вошел в контакт с тоководомо При отсутствии указанных сигналов токосъемная штанга возвращается в исходное положение и цикл повторяется, пока токосъемник не войдет в. контакт с тоководом. Для указанного типа устройства токосъемной штанги могут быть использованы скользящие или роликовые токосъемные кареткио
При движении транспортного средства по электрифицированной полосе токосъемный элемент 9 штанги 7j находясь в контакте с тоководом, закрепленным посередине полосы движения, обеспечивает устойчивую передачу электроэнергии на транспортное средство в рабочем диапазоне углов поворота токосъемной штанги при отклонениях транспортного средства от заданной тоководом линии пути Рабо- чи диапазон углов поворота штанги ограничен максимальными углами поворота штанги относительно продольной оси транспортного средства, при которых токоприемник не выходит за габариты транспортного средства.
При смещении транспортного средства от оси токовода, связанном с выездом из электрифицированной полосы движения для выполнения маневра (поворота, обгона остановки и т,д,), штанга 7 поворачивается за счет кивнешнего электропитания, В случае отказа механизма подъема штангодер- жателя токосъемная штанга выводится из контакта аварийным способом при помощи автоматического штангоулови- теля, который срабатывает при повороте токосъемной штанги на угол, выходящий за рабочий диапазон углов по0 ворота штанги (за счет кинематической связи токосъемника с тоководом) При воздействии штанги на захват 25 штан- гоуловителя срабатывает рычаг храповика (или курковый спуск)(Захват 25
5 под действием освобожденной пружины 26 поворачивается и выводит токосъемник 9 из контакта с тоководом путем ограниченного подъема токосъемной штанги. Механическая ударная нагруз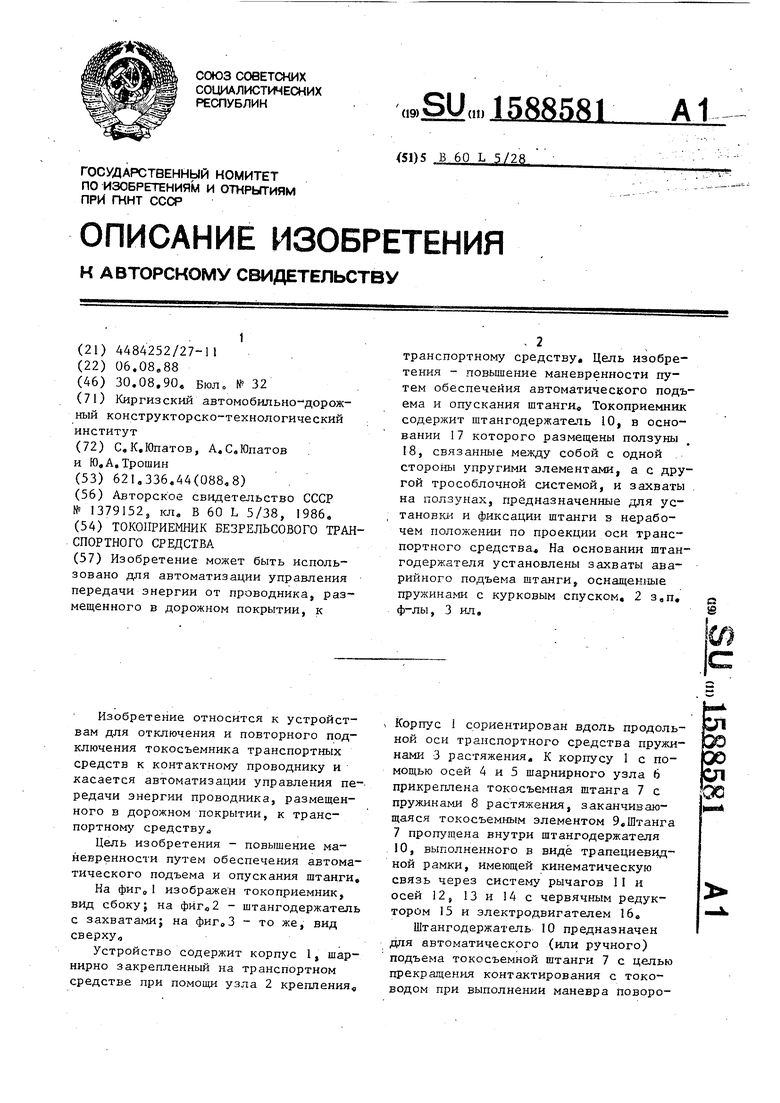


| название | год | авторы | номер документа |
|---|---|---|---|
| Токосъемное устройство для электроснабжения безрельсового транспортного средства | 1984 |
|
SU1301735A1 |
| ТОКОСЪЕМНАЯ ШТАНГА ТРОЛЛЕЙБУСА | 2009 |
|
RU2412069C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ШТАНГИ ТОКОПРИЕМНИКА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2453447C1 |
| Токосъемная головка токоприемника транспортного средства | 1981 |
|
SU1054128A1 |
| ТОКОСЪЕМНАЯ ШТАНГА ТРОЛЛЕЙБУСА | 2011 |
|
RU2527598C2 |
| Вагонотолкатель для перемещения железнодорожных вагонов и токоприемник для токосъема с нескольких проводов воздушной контактной сети (варианты) | 2021 |
|
RU2763450C1 |
| ТОКОПРИЁМНИК ДЛЯ ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2800163C1 |
| Устройство токоподвода к транспортному средству | 1985 |
|
SU1388338A1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ТОКОСЪЕМНИКА | 2014 |
|
RU2638887C2 |
| ЭКОБУС | 1997 |
|
RU2166440C2 |

Изобретение может быть использовано для автоматизации управления передачи энергии от проводника, размещенного в дорожном покрытии, к транспортному средству. Цель изобретения - повышение маневренности путем обеспечения автоматического подъема и опускания штанги. Токоприемник содержит штангодержатель 10, в основании 17 которого размещены ползуны 18, связанные между собой с одной стороны упругими элементами, а с другой трособлочной системой, и захваты на ползунах, предназначенные для установки и фиксации штанги в нерабочем положении по проекции оси транспортного средства. На основании штангодержателя установлены захваты аварийного подъема штанги, оснащенные пружинами с курковым спуском. 2 з.п. ф-лы, 3 ил.
нематической связи токосъемника с то- 20 ка токосъемной штанги на захват 25 ководом и при достижении предельного частично компенсируется за счет пово- угла рабочего диапазона поворота штан- рота корпуса 1 на оси узла 2 креплеги датчик 32 (или 33) выдает в элек- тронньгй блок управления сигнал, пре- образуемый затем в управляющий сигнал, В результате срабатывает электродвигатель 16 и через редуктор 15 и рычаги 11 воздействует на штанго- держатель 10, поворачивая его вокруг .оси 29 и поднимая его основание 17 вверх, вместе со штангой 7 Штанга 7, подхваченная штангодержателем 10, выводит из контакта с тоководом токо съемный элемент 9, при подъеме основания 17 штанги в результате ослабления тросов 21 ползуны 18 под воздействием пружин 20 перемещаются к середине основания 17 и захватами 19 устанавливают и удерживают токосъемную штангу в среднем (нерабочем) положении, соответствующем совмещению оси штанги с проекцией продольной оси транспортного средства При установке штанги в нерабочее положение сра, ния и преодоления усилия пружины 3, - При этом токосъемник может выйти за
25 габариты транспортного средства, но не более чем на 0,05 - 0,08 м,
При управлении транспортным средством водитель имеет возможность использовать при необходимости ручной
30 привод и посредством рычага 27 и пружин 28 вывести из контакта токоприемник ограниченным подъемом штанги,
Б предлагаемом устройстве испольэг зован электрический привод штанго- держателя, которьш предпочтительнее гидравлического или пневматического, так как у него значительно меньше время выполнения команды, а следова40 тельно, запаздывания исполнительного механизмаа В нерабочем поднятом положении токосъемная штанга удерживается помимо механического замка (червячный редуктор 15) суммой сил пру40 тельно, запаздывания исполнительного механизмаа В нерабочем поднятом положении токосъемная штанга удерживает ся помимо механического замка (червячный редуктор 15) суммой сил прубатывают датчики 30, 31 и 34, по сиг- 45 жи 8, 20 и 28, которая меньше сумналам которых электронный блок прекг ращает обработку первоначально поданной команды.
Аналогичным способом токосъемная штанга автоматически выводится из контакта с тоководом в конце электрифицированного участка дороги при поступлении кодированного сиг нала Конец контактной сети, который может формироваться, например, таким видом датчика, как изоляционные вставки в тоководе (не показаны) Дублирующий сигнал может быть получен также по расчетному времени отсутствия
мы гравитационных сил от масс штанго держателя 10, штанги 7 и токосъемног элемента 9, Сумма сил указанных пружин подобрана таким образом, что при 50 опускании штанги до определенного
положения они способствуют ускорению работы электродвигателя 16, а при до стижении нижней точки силы пружин уж . превьш1ают гравитационные силы и при 55 подъеме штанги они также способствую ускорению работы электродвигателя 16
В целях повьшгения надежности ориентации транспортного средства и токосъемной штанги могут быть исполь, ния и преодоления усилия пружины 3, - При этом токосъемник может выйти за
25 габариты транспортного средства, но не более чем на 0,05 - 0,08 м,
При управлении транспортным средством водитель имеет возможность использовать при необходимости ручной
30 привод и посредством рычага 27 и пружин 28 вывести из контакта токоприемник ограниченным подъемом штанги,
Б предлагаемом устройстве испольэг зован электрический привод штанго- держателя, которьш предпочтительнее гидравлического или пневматического, так как у него значительно меньше время выполнения команды, а следова40 тельно, запаздывания исполнительного механизмаа В нерабочем поднятом положении токосъемная штанга удерживается помимо механического замка (червячный редуктор 15) суммой сил пру45 жи 8, 20 и 28, которая меньше суммы гравитационных сил от масс штанго- держателя 10, штанги 7 и токосъемного элемента 9, Сумма сил указанных пружин подобрана таким образом, что при 50 опускании штанги до определенного
положения они способствуют ускорению работы электродвигателя 16, а при достижении нижней точки силы пружин уже . превьш1ают гравитационные силы и при 55 подъеме штанги они также способствуют ускорению работы электродвигателя 16.
В целях повьшгения надежности ориентации транспортного средства и токосъемной штанги могут быть исполь
зованы различные датчики, в том чис индукционные, оптические и иного ви
Цикл автоматического отключения подключения штанги 7 к тоководу во время движения транспортного средства осуществляется как в режиме ручнго управления, так и в режиме автоматического вождения (управление ин ду1к1дионной монокабельной CAB или ин го вида (оптической, локационной) ав;тономной или неавтономной CAB) о
: Автоматическая штанга 7 выполнена так, что обеспечивает возможност ydTaHOBKK датчиков 32, 33 и 34 мало rd угла поворота токосъемной штанги пр|и помощи которых можно устранить не(достатки, характерные монокабель- не|й индукционной CAB, обусловленные 30НОЙ нечувствительности приемного устройства, вызывающей рысканье тр анспортного средства, T.e, ампли- бокового перемещения, типичную индукционной монокабельной CAB, и режиму вождения под управлением водителя, а также устранить величин ошибки при выходе транспортного срества на криволинейную траекторию движения (создаются условия для потри связи с опорной траекторией дви- жфния, заданной сигнальным проводом проложенным вдоль токопровода)о За c ieT кинематической связи штанги 7 тОководом режим автоматического вождения может дублироваться при помо- щи указанных датчиков и кинематичес кЬй связи с опорной траекторией движения, заданной тоководом, в результате чего повьшается надежность автоматического вождения„
Фиг.
Ф о
5 0 5 0
0
5
рмула изобретения
1,Токоприемник безрельсового транспортного средства, содержа1ций ориентированную к расположенному на дорожном полотне токопроводу штангу с токос ьемным элементом на одном конце, другой конец которой связан с днищем транспортного средства, механизм создания нажатия, отличающий- с я тем, что, с целью повышения маневренности путем обеспечения автоматического подъема и опускания штанги, он снабжен шарнирно прикрепленным к дни11о транспортного средства штанго- держателем с приводом вертикального перемещения, подвижным основанием с пружинами растяжения, на-котором установлен привод вертикального перемещения штангодержателя, при этом подвижное основание одним концом шарнирно связано с днищем транспортного средства, а другим подпружинено к нему и шарнирно связано с Концом штанги,
2,Токоприемник по п«1, о т л и - ч а ю щ и и с я тем, что, с целью повыщения надежности наведения токоприемника на токопровод, он снабжен подпружиненными захватами, установленными подвижно на штангодержателе с возможностью взаимодействия со штангой, с приводом перемещения, выполненным в виде трособлочного механизма, .
3,Токоприемник по п,1, отличающийся тем, что он снабжен подпружиненными захватами аварийного подъема штанги с курковым спуском, установленными на штанго- держателе.
23
Id
36
21
10
17
Фиг. 2
Фаг.З
| Устройство электроснабжения наземного транспортного средства | 1986 |
|
SU1379152A1 |
