Изобретение относится к машинам для погрузочных работ на осмолозаготовках.
Цель изобретения - повышение надежности путем разгрузки механизма управления ковшом при движении машины в транспортном положении.
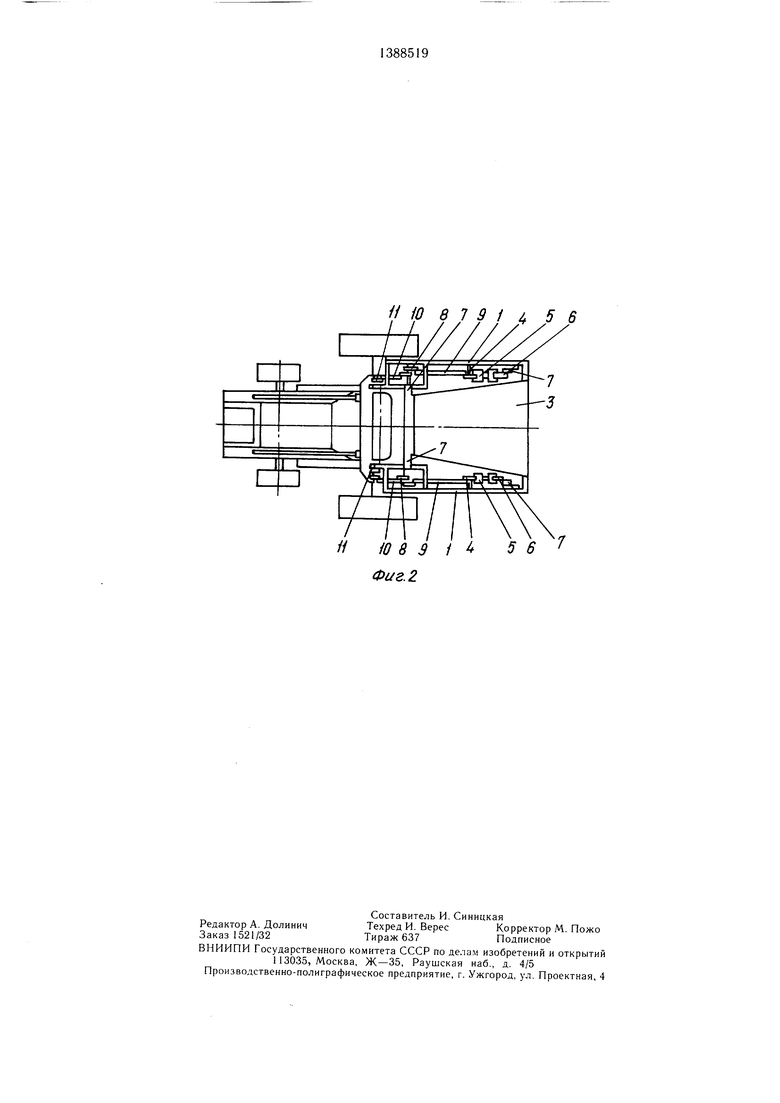
На фиг. 1 изображен механизм управления ковшом, вид сбоку; на фиг. 2 - то же, вид в плане; на фиг. 3 - кинематическая схема механизма управления ковшом.
Механизм управления содержит рычаги 1, гидроцилиндр 2 подъема и опускания рычагов, на конце которых смонтирован ковш 3. На рычагах 1 шарнирно расположены коромысла 4, верхние концы которых посредством гидроцилиндров 5, серег 6 и опроки- дываюш,их звеньев 7 кинематически связаны с ковшом 3, при этом серьги 6 шарнирно связаны с рычагами 1. Механизм выравнивания положения ковша 3 параллелограм- ного типа состоит из кронштейнов 8, одни концы которых соединены с рычагами 1, а другие посредством тяг 9 - с нижними концами коромысел 4, а посредством тяг 10 и маятниковых рычагов 11 - с базовой машиной 12. Ковш 3 со стороны базовой машины 12 имеет упор 13, расположенный с возможностью взаимодействия с рычагами 1.
Механизм работает следующим образом.
При заполнении ковша 3 осмолом последний опускается на грунт. Затем с базовой машины 12 распускают тяговый канат лебедки и кучу осмола зачокеровывают и с помош.ью лебедки затаскивают в ковш 3. После загрузки ковш 3 переводят в транспортное положение на расстояние 60-70 см от поверхности грунта. При этом тяги 10 и маятниковые рычаги 11 поворачиваются в шарнирах, чем обеспечивается контакт упора 13 ковша 3 с рычагами 11. Механизмы выравнивания и опрокидывания ковша разгружены, поскольку нагрузка от ковша 3 и осмола воспринимается только рычагами 1.
Для разгрузки ковша 3 рычаги 1 из
транспортного положения гидроцилиндром 2 поворачивают на необходимую высоту. При повороте рычагов I тяги 10 и маятниковые рычаги 11 занимают положение на одной прямой линии. Затем положение ковша 3 по
мере поворота рычагов 1 автоматически выравнивается относительно земли. Выгрузка осмола производится поворотом ковша 3 относительно рычагов 1 посредством гидроцилиндра 5, серег 6 и опрокидываюш,их звеньев 7.
Формула изобретения
20
Механизм управления ковшом машины для осмолозаготовок, включающий шарнирно смонтированные на базовой машине несущие рычаги, кинематически связанные с базовой машиной и несущими рычагами поворотные кронштейны и гидроцилиндры поворота рычагов, шарнирно соединенный с несущими рычагами ковш, кинематически свя25 занный с помощью гидроцилиндров с поворотными кронштейнами, отличающийся тем, что, с целью повыщения надежности путем снижения нагрузок на механизм в транспортном положении, поворотные кронщтейны выполнены в виде коромысел, кинематическая
30 связь которых с базовой машиной выполнена из тяг, соединенных между собой шарнирами, которые посредством дополнительных рычагов связаны с несущими рычагами, а посредством маятниковых рычагов тяги связаны с базовой машиной, при этом ковш
35 со стороны базовой машины имеет упоры, расположенные с возможностью взаимодействия с несущими рычагами.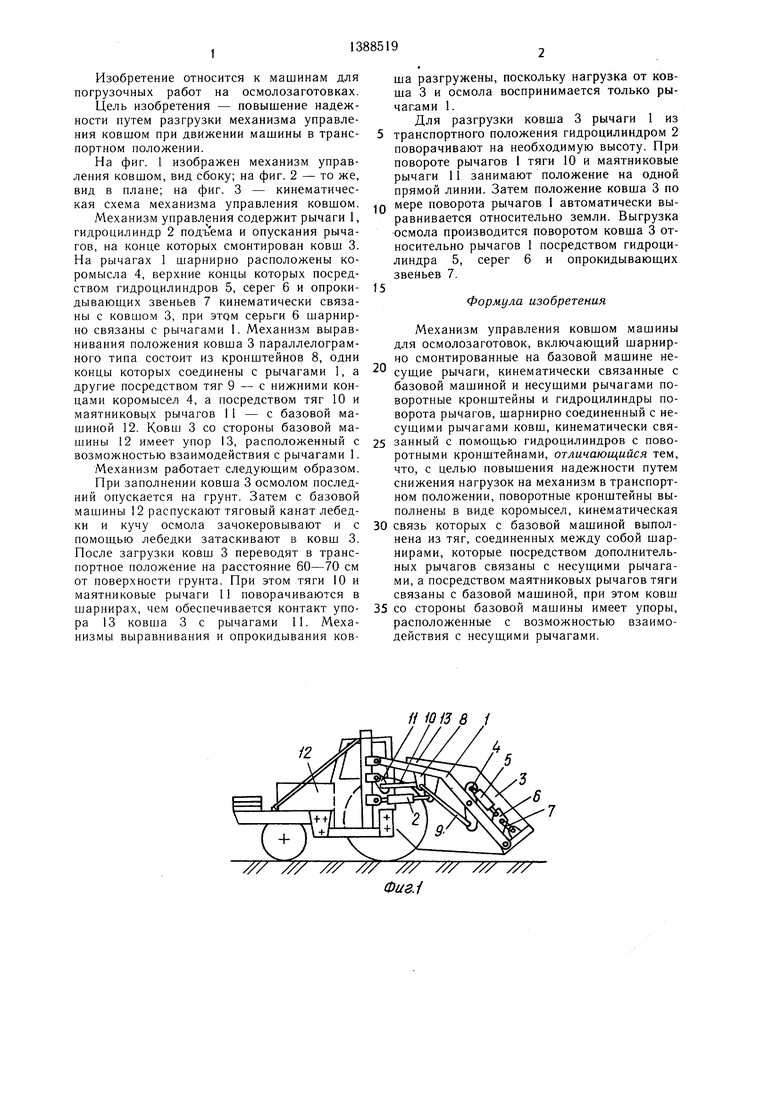
| название | год | авторы | номер документа |
|---|---|---|---|
| Многочелюстной грейфер | 1982 |
|
SU1070114A1 |
| Погрузчик-экскаватор | 1991 |
|
SU1803499A1 |
| Землеройно-транспортная машина | 1990 |
|
SU1773980A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНЫХ СРЕДСТВ ПОЛУЖИДКИМ НАВОЗОМ | 1988 |
|
RU2022913C1 |
| Щебнеочистительная машина | 2024 |
|
RU2839787C1 |
| Выемочно-доставочная машина | 1990 |
|
SU1747688A1 |
| Погрузчик | 1979 |
|
SU840020A1 |
| Скрепер | 1982 |
|
SU1063946A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1745843A1 |
| Фронтальный погрузчик с расширенной рабочей зоной | 2022 |
|
RU2783604C1 |
Изобретение относится к машинам для погрузочных работ на осмолозаготовках. Цель - повышение надежности путем разгрузки механизма управления ковшом при движении машины в транспортном положении. Механизм управления ковшом 3 включает шарнирно смонтированные на базовой машине (БМ) 12 несуш,ие рычаги (Р) 1 и связанные с ними и БМ 12 поворотные Р в виде коромысел (К) 4. Верхние концы К 4 посредством гидроцилиндров 5, серег 6 и опрокидывающих звеньев 7 кинематически связаны с ковшом 3. Кинематическая связь К 4 с БМ 12 выполнена из тяг 9, 10 и маятниковых Р 11. Со стороны БМ 12 ковш 3 имеет упор 13, расположенный с возможностью взаимодействия с Р 1. После загрузки ковша 3 осмолом ковш 3 переводят в транспортное положение. При этом тяги 10 и маятниковые Р 11 поворачиваются в шарнирах, что обеспечивает контакт упора 13 ковша 3 с Р I. Для разгрузки ковша 3 Р 1 из транспортного положения гидроцилиндром 2 поворачивают на необходимую высоту. 3 ил. (Л со 00 00 ел со cpue.s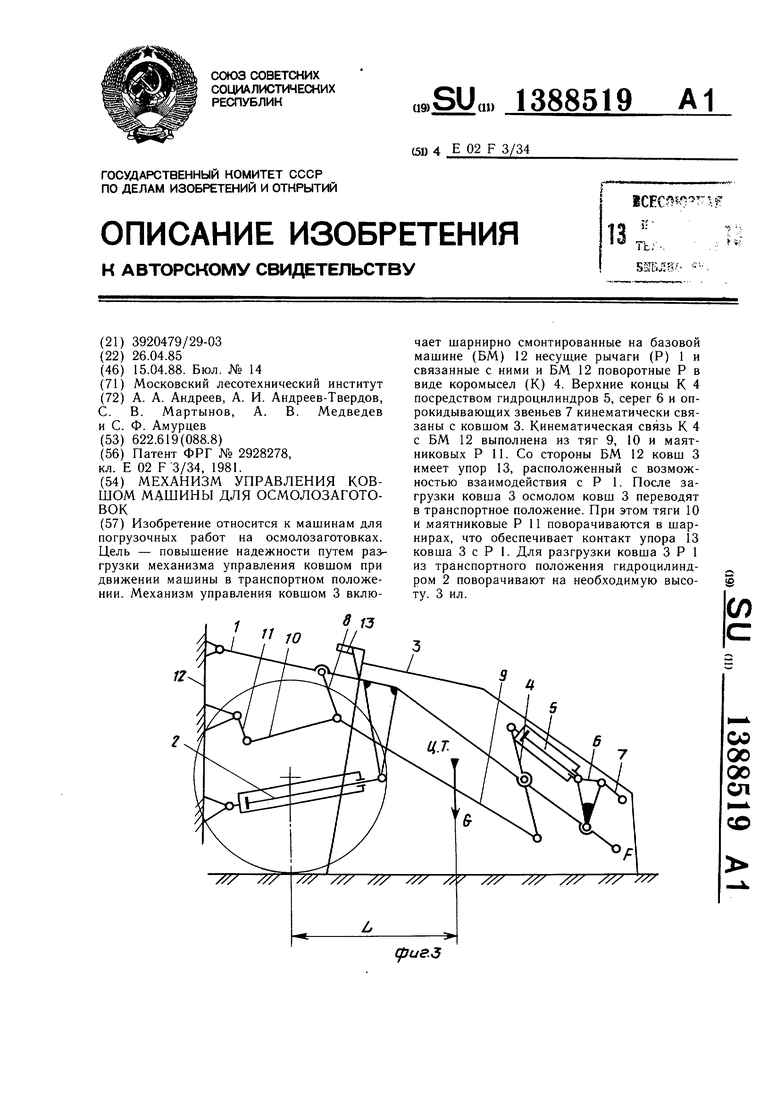
12
/// /// /////////////// Фиг.1
// ofз в 1
I // iO 8 3 i 56
Фиг. 2
// Ш 879 I / 5 6
| Патент ФРГ № 2928278, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
