i
1сл
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дистанционного управления трактором | 1987 |
|
SU1654884A1 |
| Устройство для управления положением сварочной головки | 1988 |
|
SU1613265A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
| Устройство для дистанционного управления гусеничным трактором | 1984 |
|
SU1162379A1 |
| Электропривод вентиляторов для охлаждения тягового электрооборудования электроподвижного состава переменного тока | 1990 |
|
SU1782790A1 |
| БАЛАНСИРНАЯ ТЕЛЕЖКА С ПРИВОДОМ НА КАЖДОЕ КОЛЕСО | 2019 |
|
RU2716395C1 |
| Устройство управления сортировкой изделий | 1986 |
|
SU1388111A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2006 |
|
RU2320498C1 |
| АППАРАТ ПОМОЩИ ПРИ ХОДЬБЕ ЧЕЛОВЕКУ С НАРУШЕНИЕМ ОПОРНО-ДВИГАТЕЛЬНЫХ ФУНКЦИЙ (ВАРИАНТЫ) | 2015 |
|
RU2658481C2 |
| УСТРОЙСТВО ДЛЯ ИСПЫТАНИЯ РАДИАТОРОВ НА ГЕРМЕТИЧНОСТЬ | 1992 |
|
RU2049317C1 |
Изобретение относится к землеройно- транспортному машиностроению для использования при управлении на расстоянии трактором, выполняющим дорожно-строительные или транспортные операции. Цель изобретения - повышение эффективности путем увеличения срока эксплуатации дистанционно управляемого трактора и облегчения управления. Устройство содержит логический блок 4, включенный в контур управления между приемным блоком 3 и блоком контакторов 5, включающих сервоприводы управления движением трактора. Логический блок осуществляет формирование управляющих сигналов на блок контакторов в соответствии с командами, подаваемыми с выносного пульта управления 1 и с учетом положения сервомеханизмов и динамики движение тора и сервомеханизмов. 2 ил.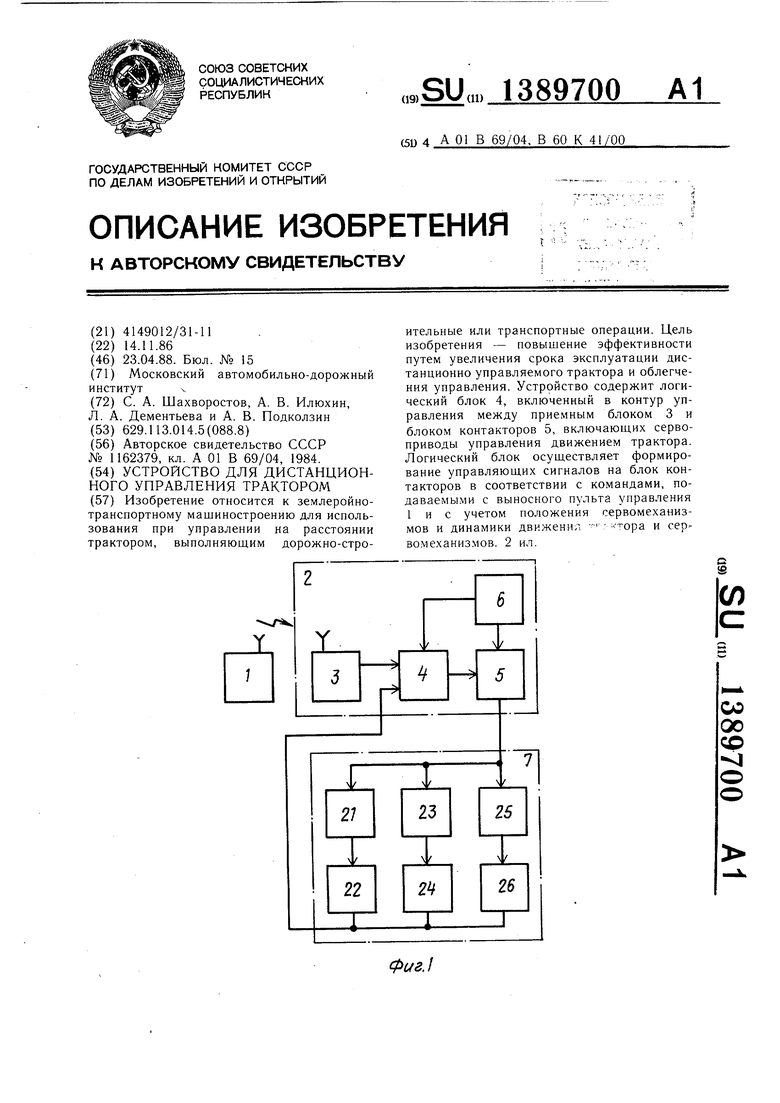
nLpbJ
СО
00 х
фиг.
Изобретение относится к землеройно- транспортному машиностроению и может быть использовано для дистанционного управления гусеничным трактором при выполнении им транспортных или дорожно-стро- ительных работ.
Цель изобретения - повышение эффективности путем увеличения срока эксплуатации дистанционно управляемого трактора и облегчения его управления.
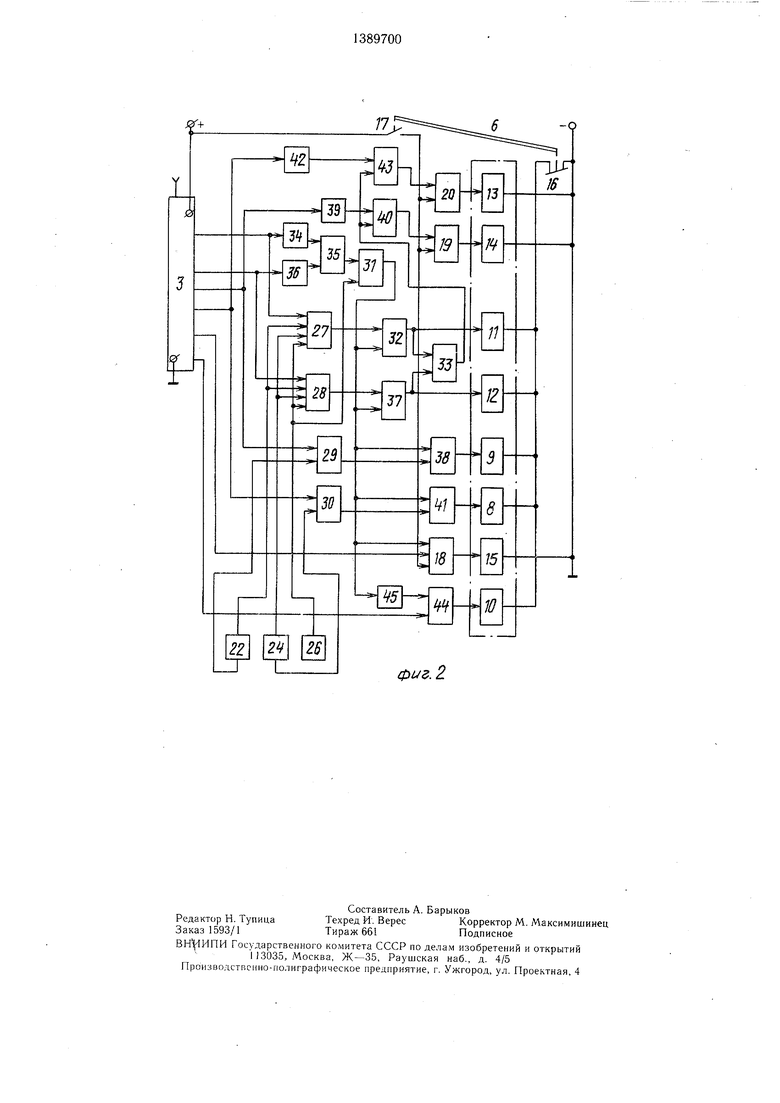
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - принципиальная электрическая схема устройства.
Устройство содержит выносной пульт 1 управления, приемный пульт 2, имеюший приемный блок 3, соединенный по радиолинии связи с выносным пультом 1 управления и электрически с логическим блоком 4, блок 5 контакторов, соединенный с логическим блоком 4, переключатель 6 режимов управления, связанный с блоком 5 контакторов и логическим блоком 4, блок 7 сервоприводов, соединенный с блоком 5 контакторов и логическим блоком 4.
Блок 5 контакторов содержит контактор 8 включения левого тормоза трактора, контактор 9 включения правого тормоза трактора, контактор 10 включения акселератора, контактор 11 управления тяговым электродвигателем на движение вперед, контактор 12 управления тяговым электродвигателем на движение назад, контактор 13 выключения левого тормоза трактора, контактор 14 выключения правого тормоза трактора и контактор 15 выключения акселератора.
Контакт 16 переключателя 6 режимов управления последовательно соединен с кон- тактора.ми 8-10 включения левого тормоза, правого тормоза и акселератора и с контакторами 11 и 12 управления тяговым электродвигателем трактора. Контакт 17 переключателя 6 режимов управления последовательно соединен с третьим входом четвертого элемента ИЛИ 18, вторым входом пя- ,того элемента ИЛИ 19 и вторым входом
шестого элемента ИЛИ 20 логического блока 4.
Блок 7 сервоприводов содержит механизм 21 управления левым тормозом трактора, соединенный с датчиком 22 положения, механизм 23 управления правым тормозом трактора, соединенный с датчиком 24 положения, механизм 25 управления акселератором, соединенный с датчиком 26 положения. Первый выход датчика 22 положения механизма 21 управления левым тормозом соединен с вторым входом первого элемента И 27 и вторым входом второго элемента И 28, а второй выход датчика 22 положения - с вторым входом пятого элемента И 29.
Первый выход датчика 24 положения механизма 23 управления правым тормозом
5
соединен с третьим входом первого элемента И 27 и с третьим входом второго элемента И 28, а второй выход датчика 24 положения - с вторым входом шестого элемента И 30. Выход датчика 26 положения механизма 25 управления акселератором соединен с четвертым входом первого элемента И 27, с четвертым входом второго элемента И 28 и со сбрасывающим входом третьего устройства ЗГ памяти. Первый выход приемного блока 3 соединен с первым входом первого элемента И 27, выход которого соединен с установочным входом первого устройства памяти 32, выход которого подключен к контактору 11 управле ния тяговым электродвигателем трактора на движение вперед и к первому входу первого элемента ИЛИ 33. Одновременно первый выход приемного блока 3 соединен через первый элемент НЕ 34 с первым входом третьего элемента И 35, второй вход
0 которого через второй элемент НЕ 36 соединен с вторым выходом приемного блока 3. Второй выход приемного блока 3 одновременно соединен с первым входом второго элемента И 28, выход которого соединен с установочным входом второго устройства 37 памяти, выход которого подключен к контактору 12 управления тяговым электродвигателем трактора на движение назад и к второму входу первого элемента ИЛИ 33.
п Третий выход приемного блока 3 соединен с первым входом пятого элемента И 29, выход которого соединен с вторым входом второго элемента ИЛИ 38, выход которого подключен к контактору 9 включения правого тормоза. Одновременно третий выход
5 приемного блока 3 соединен через четвертый элемент НЕ 39 с первым входом седьмого элемента И 40, выход которого соединен с первым входом пятого элемента ИЛИ 19.
Четвертый выход приемного блока 3 сое0 динен с первым входом шестого элемента И 30, выход которого соединен с вторым входом третьего элемента ИЛИ 41, выход которого подключен к контактору 8 включения левого тормоза трактора. Одновременс но четвертый выход приемного блока 3 соединен через пятый элемент НЕ 42 с первым входом восьмого элемента И 43, выход которого соединен с первым входом шестого элемента ИЛИ 20. . Пятый выход приемного блока 3 соеди0 нен с вторым входом четвертого элемента ИЛИ 18, выход которого подключен к контактору 15 выключения акселератора. Шестой выход приемного блока 3 соединен с вторым входом четвертого элемента И 44, выход которого подключен к контактору 10
5 включения акселератора. Выход третьего элемента И 35 соединен с устанавливаю- шим входом третьего устройства 31 памяти, выход которого подключен к сбрасывающему входу первого устройства 32 памяти, сбрасывающему входу второго устройства 37 памяти, первому входу второго элемента ИЛИ 38, первому входу третьего элемента ИЛИ 41, первому входу четвертого элемента ИЛИ 18 и через третий элемент НЕ 45 к первому входу четвертого элемента И 44. Выход первого элемента ИЛИ 33 соединен с вторым входом седьмого элемента И 40 и с вторым входом восьмого элемента И 43.
Устройство работает следующим образом.
При установке переключателя 6 режимов управления в положение ручного управления контакт 16 размыкается и разрывает цепь питания контакторов 8-12, запрещая автоматическое включение механизмов управления левым и правым тормозами на торможение и акселератором на увеличение подачи топлива, а также запрещая автоматическое включение тягового электродвигателя трактора. Одновременно контакт 17 переключателя 6 режимов управления замыкается, подавая питание на вторые входы пятого элемента ИЛИ 19, шестого элемента ИЛИ 20 и на третий вход четвертого элемента ИЛИ 18. При этом включаются контакторы 13-15, запускающие механизмы 21, 23 и 25 на полное выключение левого и правого тормозов и снижение подачи топлива до установки оборотов холостого хода дизеля трактора. При этом трактор подготовлен к управлению из кабины с по.мощью штатных органов управления.
При установке переключателя 6 режимов управления в положение дистанционного управления контакт 16 замыкается, обеспечивая питание контакторов 8-12, а контакт 17 размыкается, снимая питание с вторых входов пятого элемента ИЛИ 19 и шестого элемента ИЛИ 20 и с третьего входа четвертого элемента ИЛИ 18, отключая при этом контакторы 13-15, подготавливая приемный пульт 2 к работе в режиме дистанционного управления. В этом положении все контакторы блока 5 контакторов включаются только при наличии команд, подаваемых с выносного пульта 1 управления.
При отсутствии команд на движение трактора на первом и втором выходах приемного блока 3 присутствуют сигналы с нулевым уровнем, которые, инвертируясь на элементах НЕ 34 и НЕ 36, подаются в виде сигналов с единичным уровнем на первый и второй входы третьего элемента И 35, на выходе которого при этом появляется сигнал с единичным уровнем, устанавливающим третье устройство 31 памяти в состояние, при котором и на его выходе появляется сигнал с единичным уровнем. Последний, подаваясь на сбрасывающие входы устройств 32 и 37 памяти, на первые входы второго элемента ИЛИ 38, третьего элемента ИЛИ 41, четвертого элемента ИЛИ 18 и через третий элемент НЕ 45 на первый
0
вход четвертого элемента И 44, отключает контакторы 11 и 12 управления тяговым электродвигателем трактора, включает контакторы 8, 9 и 15, включающие ме.ханизмы 21 и 23 управления тормозами поворота трактора на включение левого и правого тормозов, а механизм 25 управления акселератором на уменьшение подачи топлива в дизель трактора до установки оборотов хо лостого хода. Если при этом трактор осуществляет движение вперед или назад, то это движение прекращается с установкой трактора на оба тормоза.
После достижения механизмом 25 управления акселератором положения, соответствующего холостым оборотам дизеля трактора, срабатывает датчик 26 положения, на выходе которого появляется сигнал с. единичным уровнем, подаваемый на сбрасывающий вход третьего устройства 31 памяти, переводя последнее в состояние, при котором сигнал на его выходе принимает нулевой уровень, при котором в условиях отсутствия команд управления трактором все контакторы 8-15, левый и правый тормоза трактора остаются включенными, а
5 акселератор находится в положении, соответствующем холостым оборотам дизеля трактора.
При подаче команды на движение, на. пример, вперед на первом выходе приемного
блока 3 появляется сигнал с единичным уров0 нем, который подается на первый вход первого элемента И 27. Ввиду того, что до момента подачи с выносного пульта 1 команды на движение вперед команд на движение не подавалось, то в соответствии с описанной последовательностью включения ме5 ханизмов 21, 23 и 25 на первых выходах датчиков 22, 24 и 26 положения присутствуют сигналы с единичным уровнем, которые подаются соответственно на второй, третий и четвертый входы первого элеменQ та И 27, на выходе которого при указанных условиях появляется сигнал с единичным уровнем, который подается на установочный вход первого устройства 32 памяти, перебрасывая его в состояние, при котором на выходе устройства 32 памяти появ5 ляется сигнал с единичным уровнем, включающий контактор 11 управления тяговым электродвигателем на движение вперед. При отсутствии команд на поворот трактора, когда на втором и третьем выходах приемного блока 3 присутствуют сигналы с нулевым
0 уровнем, происходит включение контактора 13, включающего механизм 21 управления левым тормозом на его отключение, и контактора 14 механизма 23 управления правым тормозом на его отключение. С этого момента трактор подготовлен к началу дви5
жения вперед.
При подаче с выносного пульта 1 команды на увеличение оборотов дизеля трактоpa на пятом выходе приемного блока 3 возникает сигнал с единичным уровнем, который через четвертый элемент И 44 включает контактор 10 механизма 25 управления акселератором на увеличение подачи топлива. При этом трактор начинает движение вперед. При подаче команды на поворот вправо на третьем выходе приемного блока 3 появляется сигнал с единич.- ным уровнем, который по цепи четвертый элемент НЕ 39 - седьмой элемент И 40 - пятый элемент ИЛИ 19 снимает управляю- ш,ий сигнал с контактора 14 механизма 23 управления правым тормозом. Одновременно по цепи пятый элемент И 29 - второй элемент ИЛИ 38 сигнал с единичным уровнем поступает на контактор 9 механизма 23 управления правым тормозом, включая правый тормоз. При этом правая гусеница трактора затормаживается и трактор начинает поворот вправо до тех пор, пока не будет снята команда на поворот вправо.
При снятии команды на поворот вправо на третьем выходе приемного блока 3 появляется сигнал с нулевым уровнем, который по цепи пятый элемент И 29 - второй элемент ИЛИ 38 снимает управляющий сигнал с контактора 9 механизма 23 управления правым тормозом, включающим правый тормоз на торможение, и по цепи четвертый элемент НЕ 39 - седьмой элемент И 40 - пятый элемент ИЛИ 19 включает контактор 14 механизма 23 управления правым тормозом на растормаживание правого тормоза. Если при этом на приемный блок 3 с выносного пульта 1 поступает команда на левый поворот, т.е. когда на четвертом выходе приемного блока 3 появляется сигнал с единичным уровнем, то шестой элемент И 30 закрыт для прохождения через него единичного сигнала с четвертого выхода приемного блока 3 до тех пор, пока механизм 23 управления правым тормозом не примет положения, соответствующего полностью отключенному п равому тормозу. При этом с второго выхода датчика 24 положения механизма 23 управления правым тормозом на второй вход щестого элемента И 30 поступает сигнал с единичным уровнем, открывая щестой элемент И 30 для прохождения единичного сигнала от четвертого выхода приемного блока 3, который по цепи щестой элемент И 30 - третий элемент ИЛИ 41 поступает на контактор 8 механизма 21 управления левым тормозом на включение левого тормоза. При этом левая гусеница заторможена и трактор начинает поворот влево.
С учетом того, что при реверсировании трактора из движения вперед на движение назад и наоборот возникает кратковременная сиутация, при которой на первом и втором выходах приемного блока 3 появляются одновременно сигналы с нулевым уровнем, по цепи первый элемент НЕ 34 - второй элемент НЕ 36 - третий элемент И 35 включается третье устройство 31 памяти, на выходе которого появляется сигнал с единичным уровнем, котЪрый через первое устройство 32 памяти, второе устройство 37 памяти отключает контакторы 11 и 12 управления тяговым электродвигателем трактора путем переброса первого устройства 32 памяти и второго устройства 37 памяти в состояние, при котором на их выходах появляется сигнал с нулевым уровнем. Одновременно единичный сигнал с выхода третьего устройства 31 памяти через второй элемент ИЛИ 38 включает контактор 9 ме5 ханизма 23 управления правым тормозом на включение правого тормоза, через третий элемент ИЛИ 41 включает контактор 8 механизма 21 управления левым тормозом на включение левого тормоза и через четвертый элемент ИЛИ 18 включает кон0 тактор 15 механизма 25 управления акселератором на снижение подачи топлива до установки оборотов холостого хода дизельного двигателя трактора. При этом команда на обратное движение трактора осу
ществляется лищь после того, как команды
на торможение обеих гусениц и перевод акселератора в положение холостых оборотов дизеля трактора не будут выполнены и датчики 22, 24 и 26 положения механизмов сервопривода не сформируют на своих первых выходах сигналов с единичным уровнем, соответствующих выполнению команд на торможение обеих гусениц и перевод акселератора в положение холостых оборотов дизеля трактора.
35
Формула изобретения
0
Устройство для дистанционного управления- трактором, содержащее выносной пульт управления, приемный пульт, включающий приемный блок, связанный с выносным пультом, блок контакторов, включающий контакторы включения тормозов, контактор включения акселератора, контакторы выключения тормозов, контактор выключе- НИН акселератора, переключатель режимов
5 управления, соединенный с блоком контакторов, и блок сервоприводов, включающий электроуправляемые приводы перемещения, преимущественно механизмы поворотного действия управления тормозами и акселератором трактора с тяговым электродвигателем
0 и магнитными пускателями, соединенными с контакторами управления тяговым электродвигателем, отличающееся тем, что, с целью повыщения эффективности путем увеличения срока эксплуатации дистанционно управляемого трактора и облегчения управ5 ления, приемный пульт снабжен логическим блоком, переключателем режимов управления, блок сервоприводов снабжен датчиками положения механизмов управления тормозами поворота и акселератора, при этом логический блок включает в себя восемь элементов И, шесть элементов ИЛИ, пять элементов НЕ и три устройства памяти, причем первый выход приемного блока соединен с первым входом первого элемента И, второй, третий и четвертый входы которого соединены соответственно с первыми выходами датчиков положения механизмов управления левым тормозом, правым тормозом и с выходом датчика положения механизма управления акселератором, второй выход приемного блока соединен с первым входом второго элемента И, второй, третий и четвертый входы которого соединены соответственно с первыми выходами датчиков положения механизмов управления левым тормозом, правым тормозом и с выходом датчика положения механизма управления акселератором, выход первого элемента И соединен с устанавливающим входом первого устройства памяти, выход которого подключен к контактору управления тяговым электродвигателем трактора на движение вперед и к первому входу первого элемента ИЛИ, выход второго элемента И соединен с устанавливающим входом второго устройства памяти, выход которого подключен к контактору управления тяговым электродвигателем трактора на движение назад и второму входу первого элемента ИЛИ, одновременно первый выход приемного блока через первый элемент НЕ соединен с первым входом третьего элемента И, второй выход, приемного блока через второй элемент НЕ соединен с вторым входом третьего элемента И, выход которого соединен с устанавливающим входом третьего устройства памяти, выход которого подключен к сбрасывающему входу первого устройства памяти, сбрасывающему входу второго устройства памяти, к первому входу второго элемента ИЛИ, первому входу третьего элемента ИЛИ, первому входу четвертого элемента ИЛИ и через третий элемент НЕ к первому входу четвертого элемента И, третий выход приемного блока соединен с первым входом пятого элемента И, второй вход
0
которого соединен с вторым выходом датчика положения механизма управления левым тормозом, а выход с вторым входом второго элемента ИЛИ, выход которого подключен к контактору включения правого тормоза, четвертый выход приемного блока соединен с первым входом шестого элемента И, второй вход которого соединен с-вторым выходом датчика положения механизма упQ равления правым тормозом, а выход с вторым входом третьего элемента ИЛИ, выход которого подключен к контактору включения левого тормоза, одновременно третий выход приемного блока через четвертый элемент НЕ соединен с первым входом седьмого элемента И, выход которого соединен с первым входом пятого элемента ИЛИ, выход которого подключен к контактору выключения правого тормоза, четвертый выход приемного блока через пятГый элемент НЕ соединен с первым входом восьмого элемента И, выход которого соединен с первым входом щестого элемента ИЛИ, выход которого подключен к контактору выютю- чения левого тормоза, пятый выход приемного блока соединен с вторым входом чет5 вертого элемента ИЛИ, выход которого подключен к контактору выключения акселератора, шестой выход приемного блока соединен с вторым входом четвертого элемента И, выход которого подключен к контактору включения акселератора, причем выход датчика положения механизма управления акселератором дополнительно соединен с сбрасывающим входом третьего устройства памяти, первый контакт переключателя режимов управления соединен с вторым входом пятого элемента ИЛИ, с вто5 рым входом щестого элемента ИЛИ и с третьим входом четвертого элемента ИЛИ, второй контакт переключателя режимов управления соединен с контакторами включения левого тормоза, включения правого
0 тормоза, включения акселератора и контакторами управления тяговым электродвигателем трактора; а выход первого элемента ИЛИ соединен с вторым входом седьмого элемента И и с вторым входом восьмого элемента И.
0
| Устройство для дистанционного управления гусеничным трактором | 1984 |
|
SU1162379A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
