со
со о о
СП
Изобретение относится к машиностроению и предназначено для снятия облоя с прямоугольных прессованнык пластмассовых изделий.
Целью изобретения является повышение качества при обработке прямоугольных деталей.
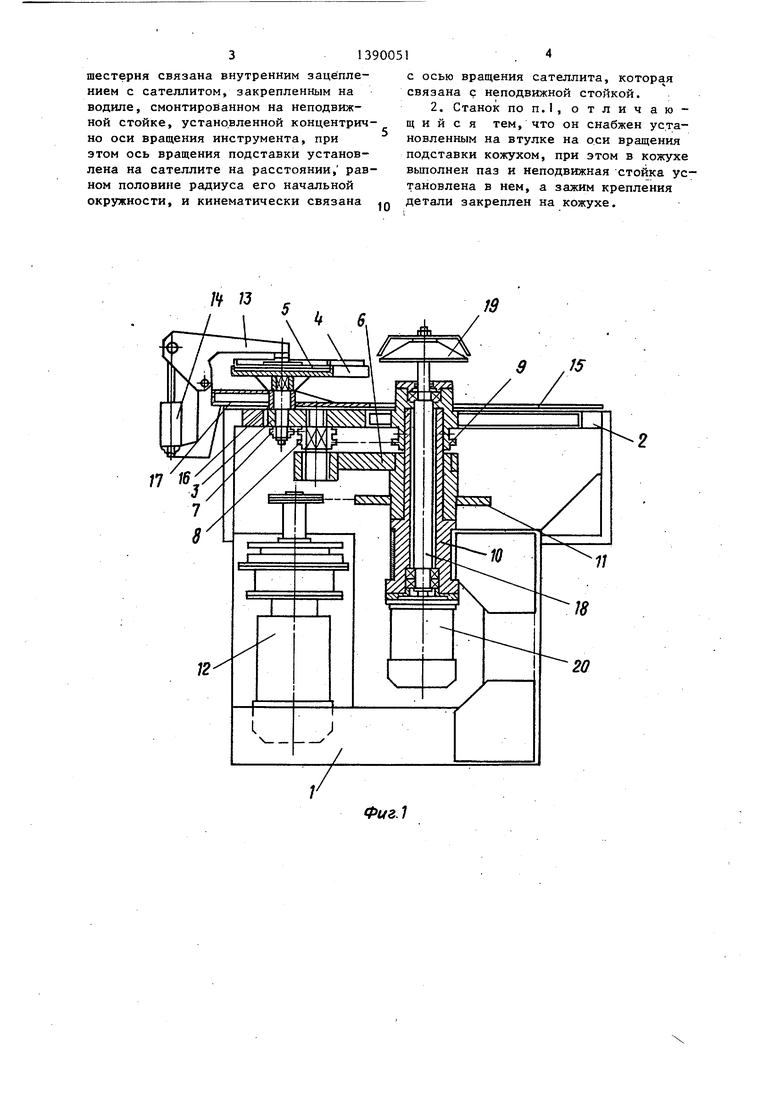
На фиг. изображен предлагаемый станок; на фиг.2 - схема перемещения детали при обработке.
На станине 1 неподвижно крепится привод вращения в виде параллелограм- много механизма, содержащего венцо- вую шестерню 2. Во внутреннее зацеп- ление с ней входит сателлит 3, на котором смонтирована подставка А для крепления детали. Ось 5 подставки 4 установлена в опоре на расстоянии.
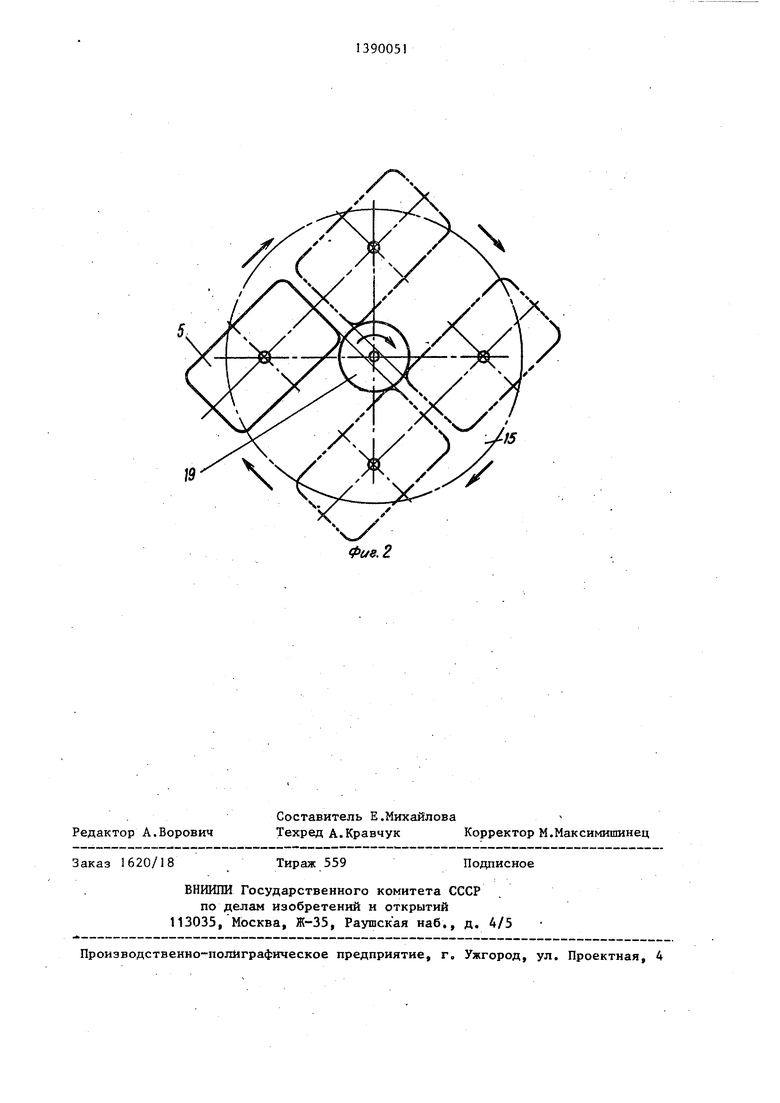
сателлитом 3 одного оборота, а водило 6 за это время поворачивается на четверть оборота, при этом происходит обработка одной стороны детали 21. Когда водило 6 совершит полный оборот ось 5 с подставкой А описывают квадрат. При этом обрабатываются все четыре стороны детали. Геометрические оси вращения водила 6 и режущего инструмента 19 совпадают, поэтому инструмент I9 находится 7 центре квадрата. Чтобы подставка А с деталью сохранила первоначальное положение в плоскости при совершении вокруг инструмента 19 полного оборота, звездочка 7 на оси подставки А и звездочка 8 на оси сателлита 3 соединены цепью и равны по величине,
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для зачистки облоя | 1986 |
|
SU1390050A1 |
| Автомат для штамповки деталей | 1991 |
|
SU1811947A1 |
| Станок для бесшаблонного фрезерования деталей криволинейной формы | 1984 |
|
SU1212787A1 |
| Фрезерный станок | 1980 |
|
SU952469A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЛОЖНЫХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 1992 |
|
RU2038926C1 |
| УНИВЕРСАЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1994 |
|
RU2064860C1 |
| Строгальный станок | 1978 |
|
SU772752A1 |
| Металлорежущий станок | 1977 |
|
SU704756A1 |
| Зубоотделочный станок с инерционной связью | 1987 |
|
SU1563870A1 |
| Станок для удаления облоя | 1986 |
|
SU1419902A1 |
Изобретение относится к машиностроению и предназначено для снятия облоя с прямоугольных прессованных пластмассовых изделий. Цель - повышение качества обработки прямоугольных деталей. Для этого привод вращения подставки выполнен в виде планетарного механизма, в котором неподвижно закрепленная на станине шестерня связана внутренним зацеплением с сателлитом, закрепленным на водиле. Водило смонтировано на неподвижной стойке, установленной концентрично оси вращения инструмента. Ось вращения подставки установлена на сателлите на расстоянии, равном половине радиуса его начальной окружности, и кинематически связана с осью вращения сателлита, которая соединена с неподвижной стойкой. Станок снабжен установленным на втулке на оси вращения подставки кожухом. В кожухе выполнен паз и в.нем установлена неподвижная стойка. Зажим крепления детали закреплен на кожухе. 1 з.п. ф-лы, 2 ил. (Л
равном половине радиуса начальной ок-20 кроме того, звездочка 8 на оси сателружности сателлита 3. Сателлит 3 закреплен на водйле 6, установленн(эм с возможностью вращения вокруг неподвижной оси, установленной на станине 1, причем ось подставки А соединена 25 с осью сателлита 3 кинематически, .например цепНой передачей со звездочками 7 и В на этик осях. Другая цепь соединяет звездочку 8 на оси сателлита со звездочкой 9, закрепленной -JQ неподвижно на стойке 10. На водйле 6 смонтирована звездочка 11, через которую передается вращение цепью от привода 12. Обрабатываемая деталь, установленная на подставке А, закрепляется зажимом 13, которьш приводится в действие при помощи пневмоци- линдра 1А. Зажим 13 с пневмоцилинд- ром IА смонтированы на кожухе 15, установленном втулкой I6 на ось 5 вращения подставки А, а имеющимся, пазом 17 - на неподвижную стойку 10. Стойка 10 установлена концентрично оси 18, на которой закреплен режущий инструмент 19, а другой конец соединен с приводом 20 вращения.
Станок работает следующим образом.
На подставку А устанавливается деталь и закрепляется на ней .зажимом 13, который срабатывает при включении пневмоцилиндра 1А. Затем включа- 50 ется привод вращения режущего инструмента 19 и привод водила 12, которое заставляет сателлит 3 перемещаться по венцовой шестерне 2. Вследствие этого ось с подставкой А и закреп- ленной на ней деталью, размещенные на середине радиуса сателлита 3, перемещаются по прямой при совершении
35
40
45
лита 3 соединена с неподвижной, равной ей звездочкой 9 стойки 10. Разница между размерами сторон прямоугольной детали компенсируется диаметром режущего инструмента 19. При совершении водилом 6 полного оборота подставка А с деталью 21 возвращается в начальное положение. Срабатывает пневмоцилиндр 1А, освобождая деталь от зажима 13. После этого обработанная деталь снимается с подставки А.
Таким образом, предлагаемая конструкция станка позволяет снимать выступающий за стенки облой с плоских деталей преимущественно прямоугольной формы за один оборот без переналадки станка или с заменой режущего инструмента на инструмент другого диаметра. Кроме того, прижим Детали сверху дает возможность компенсировать имеющиеся коробления детали и обработать их точно по размеру.
Формула изобретения
лита 3 соединена с неподвижной, равной ей звездочкой 9 стойки 10. Разница между размерами сторон прямоугольной детали компенсируется диаметром режущего инструмента 19. При совершении водилом 6 полного оборота подставка А с деталью 21 возвращается в начальное положение. Срабатывает пневмоцилиндр 1А, освобождая деталь от зажима 13. После этого обработанная деталь снимается с подставки А.
Таким образом, предлагаемая конструкция станка позволяет снимать выступающий за стенки облой с плоских деталей преимущественно прямоугольной формы за один оборот без переналадки станка или с заменой режущего инструмента на инструмент другого диаметра. Кроме того, прижим Детали сверху дает возможность компенсировать имеющиеся коробления детали и обработать их точно по размеру.
Формула изобретения
шестерня связана внутренним зацеплением с сателлитом, закрепленным на водиле, смонтированном на неподвижной стойке, установленной концентрич- но оси вращения инструмента, при этом ось вращения подставки установлена на сателлите на расстоянии, равном половине радиуса его начальной окружности, и кинематически связана
/V J3
17 16
с осью вращения сателлита, которая связана с; неподвижной стойкой,
15
Фиг.1
Фи9.2
Редактор А.Ворович
Составитель Е.Михайлова
Техред А.Кравчук Корректор М.Максимишинец
Заказ 1620/18
Тираж 559
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Подписное
| Станок для механической обработки пластмассовых деталей | 1980 |
|
SU973381A1 |
| Солесос | 1922 |
|
SU29A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Солесос | 1922 |
|
SU29A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| I | |||
