Изобретение относится к оборудованию для выполнения погрузочно-раз- грузочных работ, в частности для захвата и транспортировки штучных грузов как коробчатой формы, так и цилиндрической или овальной формы.
Цель изобретения - расширение функциональных возможностей путем обеспечения захвата грузов цилиндри- ческой и овальной формы.
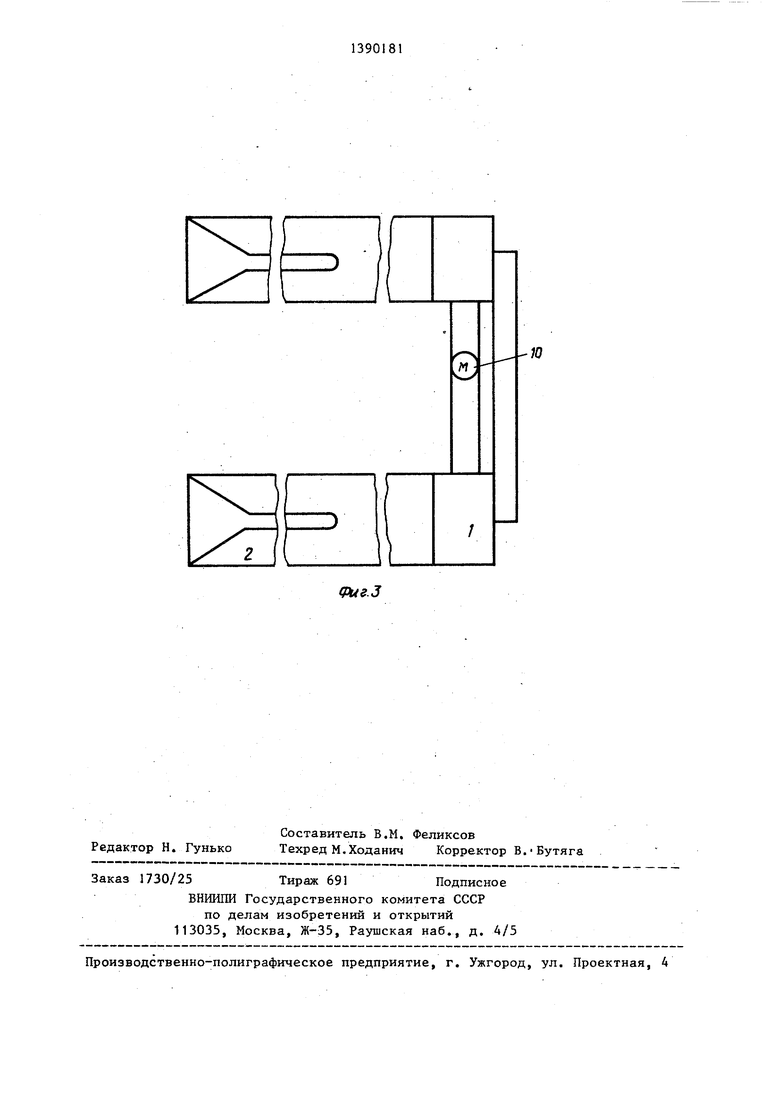
На фиг. 1 изображены вилы с убранным рычажным механизмом; на фиг, 2 - то же, с рычажным механизмом в рабо- чем положении; на фиг, 3 - то же, вид сверху.
Вилы погрузчика содержат полые с прорезью на рабочих поверхностях вертикальные 1 и горизонтальные 2 части, внутри каждой из этих частей установлены захватный элемент 3J- образной формы и рычажный механизм,- включающий в себя двуплечий рычаг 4, шарнирно соединенный одним концом с коленом захватного элемента 3, дру- гим - с приводом перемещения вдоль вил, а своей средней частью - с одним концом подпружиненного пружиной 5 | -образного рычага 6, другой конец которого шарнирно соединен с ползуном 7, установленным с возможностью перемещения по продольной направляющей 8, а своим коленом 1 -образный рычаг 6 шарнирно соединен с одним ; концом шатуна 9, другой конец которого шарнирно соединен со свободным концом захватного элемента 3.
Привод перемещения двуплечего рычага 4 вдоль вил состоит из двигателя 10, связанного с парой конических зубчатых колес 11 на каждой виле и передачей винт 12 - гайка 13, располо женной в каждой части вил, причем гайка 13 гаарнирно соединена с двуплечим рычагом 4, Направлярщая 8 снабжена с двух сторон концевыми упорами 14
Устройство работает следукяцим образом.
Захват при убранном рычажном механизме с отключенным двигателем 10 выполняет функцию вилочного захвата погрузчика. Горизонтальные части вил служат для захвата предметов на поддонах, а вертикальные - как ограничители груза (фиг,1).
В процессе захвата штучных грузов 15 цилиндрической или овальной формы включается двигатель 10, четыре одинаковых рычажных механизма с винтовы
с
0 5
5
0
5
0
5
0
ми приводами выходят из прорезей и открытых концов вил и производят обхват предмета с одновременным накатыванием его на горизонтальные рамы вил,
Каждьш рычажный механизм работает следугацим образом (фиг,2 и 3j, Движение от двигателя 10 передается через коническое зубчатое колено 11 винту 12, вращение которого вызывает поступательное перемещение гайки 13. Движение гайки 13 приводит в движение весь рычажный механизм, который перемещается к концам частей вил. Механизм выходит из полой части 2 или 1 вил через открытые ее концы и прорези до тех пор, пока ползун 7 не достигнет упора 14 или пока любое звено не коснется охватываемого груза 15, после чего рычажный механизм теряет одну степень свободы и начинается относительное движение его звеньев в сторону обхвата груза.
Дальнейшее движение гайки 13 передается двуплечему рычагу 4, который, поворачиваясь относительно шарнира на гайке 13, передает движение захватному элементу 3, последний поворачивается относительно двуплечего рычага 4 и передает движение.через шатун 9 I-образному рычагу 6, кото- рьй поворачивается относительис) шарнира на ползуне 7. Ползун 7 в момент соприкосновения элементов рычажного механизма с охватываемым грузом становится неподвижным. Вся подвижная система рычажного механизма, совершая .относительные перемещения, осуществляет захват груза 15,
Аналогично и одновременно работает рычажный механизм, рамещенный внутри вертикальной части вил, и в результате этих синхронных движений двух механизмов в каждой части вил предмет охватывается снизу и сверху.
Формула изобретения
1. Вилы погрузчика, содержащие вертикальные и полые с прорезью на рабочей поверхности горизонтальные- части, внутри каждой из которых установлен захватный элемент, рачажный механизм с рычагом, одним концом шарниром соединенным с захватным элементом, а другим - с приводом перемещения рычага вдоль вил, о т л и- чающиеся тем, что, с целью
расширения функциональных возможностей путем обеспечения захвата грузов цилиндрической и овальной формы они снабжены установленным в каждой вертикальной части вил, которая выполнена полой с прорезью на рабочей поверхности, дополнительным захватным элементом, связанным рычажным меха-; низмом с указанным приводом, причем каждый рычажный механизм дополнительно снабжен продольной направляющей, шатуном, ползуном, установленным с возможностью перемещения по направляющей, и 1-образным рычагом, шарнирно соединенным одним концом со средней частью рычага, который выполнен двуплечим, другим - с ползуном, а своим коленом - с шатуном, захватный элемент выполнен J-образной формы, и его свободный конец шарнирно соединен с шатуном. .
2, Вилы ПОП.1, отличающиеся тем, что привод содержит двигатель, коническую зубчатую передачу и передачу винт-гайка, расположенную в каждой части вил, причем гайка соединена с двуплечим рычагом шарниром.
| название | год | авторы | номер документа |
|---|---|---|---|
| Навесное устройство к погрузчику для перегрузки грузов в кипах | 1990 |
|
SU1791371A1 |
| Захватное устройство к погрузчику | 1978 |
|
SU749798A1 |
| ГРУЗОЗАХВАТ-СТАЛКИВАТЕЛЬ К ПОГРУЗЧИКУ | 1996 |
|
RU2116958C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНЫХ ГРУЗОВ | 1999 |
|
RU2162053C1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Грузозахватное устройство | 1989 |
|
SU1768492A2 |
| Измеритель профиля котловых полостей | 1990 |
|
SU1778284A1 |
| Грузозахватное устройство | 1984 |
|
SU1196329A1 |
| Грузозахватное устройство | 1985 |
|
SU1294750A1 |
| АВТОЗАХВАТ ДЛЯ ТРАНСПОРТИРОВКИ МЕЛКОШТУЧНЫХ БЕТОННЫХ ИЗДЕЛИЙ | 2007 |
|
RU2337052C1 |

Изобретение относится к оборудованию для выполнения погрузочно-раз- грузочных работ, в частности.для зах вата и транспортировки штучных грузов как коробчатой, так и цилиндрической /J или овальной формы. Цель изобретения - расширение функциональных возможностей путем обеспечения захвата грузов цилиндрической и овальной формы. Вилы погрузчика содержат полые вертикальные 1 и горизонтальные 2 части. Внутри каждой из этих частей установлены захватный элемент 3 - образной формы и рычажный механизм, связанный с приводом. При убранном рычажном механизме вилы выполняют CBOto непосредственную функтщю. Для захвата грузов цилиндрической или овальной формы рычажный механизм в каждой части вил приводом приводит в движение захватные элементы 3, которые синхронно обжимают груз I5 снизу и сверху. 1 з.п. ф-лы, 3 ил. Ф (/) W) СО 00 12 10 Фuг.i
ю
(Риг.3
| Синхронизирующее устройство для аппарата, служащего для передачи изображений на расстояние | 1920 |
|
SU225A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
