(54)- ЗАХВАТНОЕ УСТРОЙСТВО К ПОГРУЗЧИКУ
1
Изобретение относится к транспортной технике, в частности к механизации и автоматизации погрузочно-разгрузочных работ при складировании и транспортировке тарно-штучных грузов, а именно порожних баллонов для газов на складах, в железнодорожных вагонах, портах и т.п.
Известно захватное устройство к погрузчику, включающее корпус с направляющими, ползуны, перемещающиеся по этим направляющим и имеющие на одних концах захватные лапы, механизм перемещения ползунов, упорные пластины и захватные рычаги 1.
Такое устройство предназначено в основном для грузов коробчатой формы, например ящиков, и не обеспечивает возможность захвата грузов цилиндрической формы малого диаметра, а также захвата нескольких единиц такого груза как с одновременным, так и с последовательным освобождением каждой единицы груза при укладке в штабель.
Цель изобретения - обеспечение комплексно-механизированной перегрузки штучных грузов, например порожних баллонов для газов, в стесненных условиях.
Это достигается тем, что предлагаемое устройство снабжено кулачками, щарнирно установленными на ползунах, рамкой-толкателем, прикрепленной к механизму перемещения ползунов и взаимодействующей с кулачками, и кронштейном, установленным в нижней части корпуса, причем свободные концы ползунов имеют торцовую планку, взаи.модейсгвующую с рамкой-толкателем, и дополнительный кронштейн, шарнирно-рычажно связанный с захватными рычагами,
10 смонтированными на кронштейне, а захватная лапа снабжена противовесом и фиксирующим элементом с фигурным вырезом, при этом упорная пластина прикреплена к нижней части корпуса и имеет выгнутые края. Кроме того, с целью осуществления поочередного раскрытия захватных лап кулачки смещены относительно друг друга на длину .хода ползуна. Для осуществления одновременного раскрытия захватных лап толкающая плита снабжена откидывающимися
20 упорами.
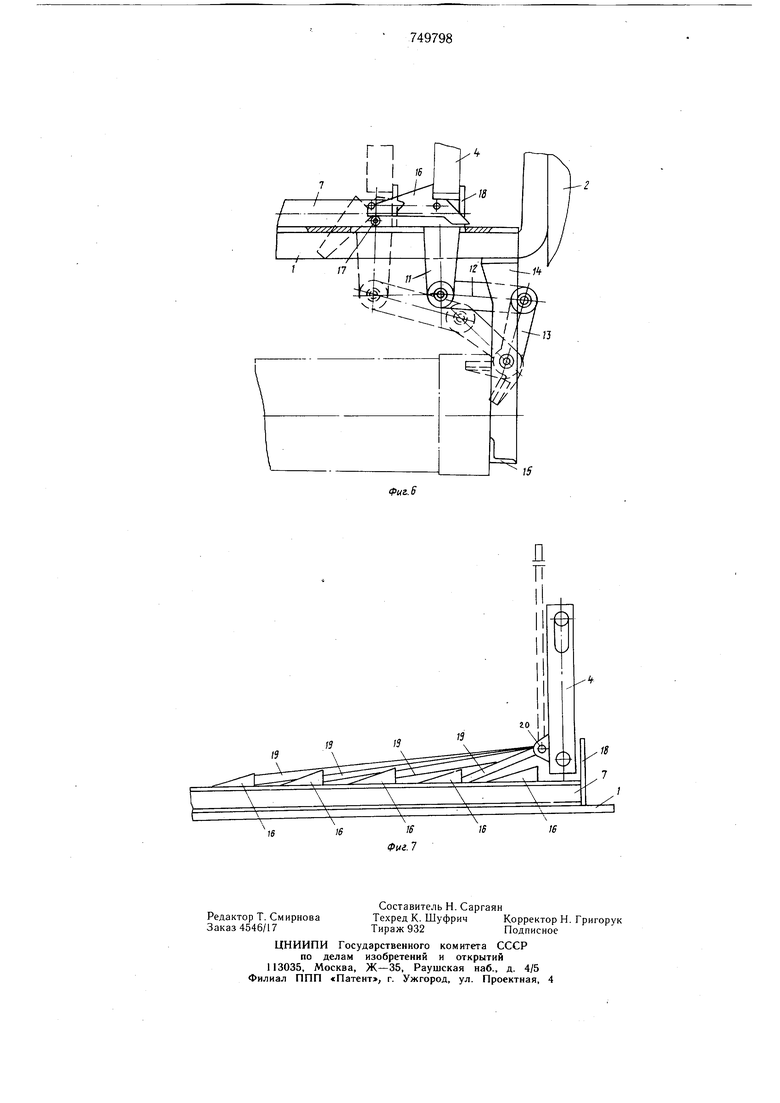
На фиг. 1 показано захватное устройство к погрузчику, вид сбоку; на фиг. 2 - то же, план; на фиг. 3 дан вид по стрелке А на фиг. 1; на фиг. 4 - кинематическая схема захвата; на фиг. 5-узел захватной лапы; на фиг. 6 - узел привязки ползуна с угловым захватным элементом и взаимодействие рамки толкателя с кулачком; на фиг. 7вариант перенастройки захвата на синхронную работу. Захватное устройство к погрузчику состоит из рамы 1, прикрепленной своей вертикальной составляющей к каретке грузоподъемника 2, на которой смонтирован двухзвенный пантограф 3, с рамкой-толкателем 4, приводимый в движение силовым цилиндром 5. На горизонтальной составляющей рамы 1 установлены направляющие ролики 6, по которым перемещаются ползуны 7 с жестко соединенной на внещней консольной части захватной лапой 8. Лапа снабжена фиксируюш.им элементом 9, выполненным в виде 1-образной планки с фигурным вырезом на одном конпе для фиксации основания головки газового баллона, и противовесом 10 на другом конце для возврата ее в исходное положение после снятия нагрузки, т.е. после освобождения захвата от груза. С противоположной стороны ползун 7 снабжен дополнительным кронщтейном 11, выполненным в виде проущины,щарнирно связанной через тягу 12 с захватным рычагом 13, установленным на кронштейнах 14 рамы 1. Продолжением кронштейнов 14 образованы ребра, связанные поперечной планкой 15, необходимой для продольной ориентации погрузчика относительно захватываемого груза. Каждый ползун 7 снабжен шарнирно установленным кулачком 16, который входит во взаимодействие с рамкой-толкателем 4 и, перемещаясь, обкатывает ролик 17. Возврат ползунов 7 в исходное положение осуществляется путем взаимодействия рамки-толкателя 4 с опорной пятой 18 каждого ползуна 7. Одновременно происходит установка кулачков 16 в рабочее положение. Рамка-толкатель 4 снабжена откидывающимися упорами 19, которые фиксируются вертикально с помощью стопорных устройств 20, а при необходимости синхронной работы захватного устройства могут устанавливаться в горизонтальном положении. С нижней стороны, на горизонтальной составляющей рамы 1, укреплена опорная пластина 21 с фигурно выгнутыми концами для ориентации захватного устройства по высоте укладки захватываемого груза. Устройство работает следующим образом. Погрузчик подъезжает к штабелю груза, в частности к щтабелю порожних баллонов для газов, уложенных по образующей цилиндра (в положении лежа), с заранее выдвинутыми лапами 8 и ориентируется продоль но относительно штабеля посредством упора поперечной планки 15 в штабель груза и затормаживается в таком положении. После этого водитель опускает захватное устройство на груз до соприкосновения его с последним посредством опорной пластины 21 и включает механизм закрытия захватного устройства. Захватное устройство закрывается за счет втягивания штока силового цилиндра 5, который собирает двухзвенный пантограф 3 и таким образом перемещает рамку-толкатель 4. Последняя в свою очередь, войдя во взаимодействие с опорной пятой 18 каждого ползуна 7, заставляет их неремещаться с захватными лапами 8, которые обхватывают головки газовых баллонов и фиксируют их элементами 9. Одновременно происходит перемещение тяги 12, связанной с консолью ползуна 7, и происходит поворот углового захватного рычага 13 относительно своей оси, достаточный для надежного захвата им «бащмака газового баллона. После этого груз считается надежно зафиксированным в захватном устройстве погрузчика и готов к транспортировке. После доставки груза к месту укладки илп передачи на другое -транспортное средство освобождение захватного устройства происходит в обратном порядке, причем за счет смещения кулачков 16 относительно друг друга на некоторое расстояние происходит попеременное освобождение каждой единицы груза захватной лапой 8. При необходимости синхронной работы всех захватных лап 8 откидывающиеся упоры 19, зафиксированные на ра.мке-толкателе 4 вертикально, устанавливаются в горизонтальное положение. Длина каждого упора 19 соответствует удалению рамки-толкателя 4 от кулачков 16 каждого ползуна 7. Синхронная работа захватного устройства происходит аналогично описанному. Формула изобретения 1. Захватное устройство к погрузчику, включающее корпус с направляющими, ползуны, перемещающиеся по этим направляющим и имеющие на одних концах захватные лапы, механизм перемещения ползунов, упорные пластины и захватные рычаги, отличаюш,ееся тем, что, с целью обеспечения комплексно-механизированной перегрузки штучных грузов, например порожних баллонов для газов, в стесненных условиях, оно снабжено кулачками, щарнирно установленными на ползунах, рамкой-толкателем, прикрепленной к механизму перемещения ползунов и взаимодействующей с кулачками, и кронщтейном, установленным в нижней части корпуса, причем свободные концы ползунов имеют торцовую планку, взаимодействующую с рамкой-толкателем, и дополнительный кронщтейн, шарнирно-рычажно связанный с захватными рычагами, смонтированными на кронштейне, а захватная лапа снабжена противовесом и фиксирующим элементом с фигурным вырезом, при этом упорная пластина прикреплена к нижней части корпуса и имеет выгнутые края. 2.Устройство по п. 1, отличающееся тем, что, с целью осуществления поочередного раскрытия захватных лап, кулачки смешены относительно друг/друга на длину хода ползуна. 3.Устройство по пп. 1 и 2, отличающееся тем, что, с целью осуществления одновре78 менного раскрытия захватных лап, рамкатолкатель снабжена откидывающимися упорами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 492457, кл. В 66 С I/4-4-, 1975.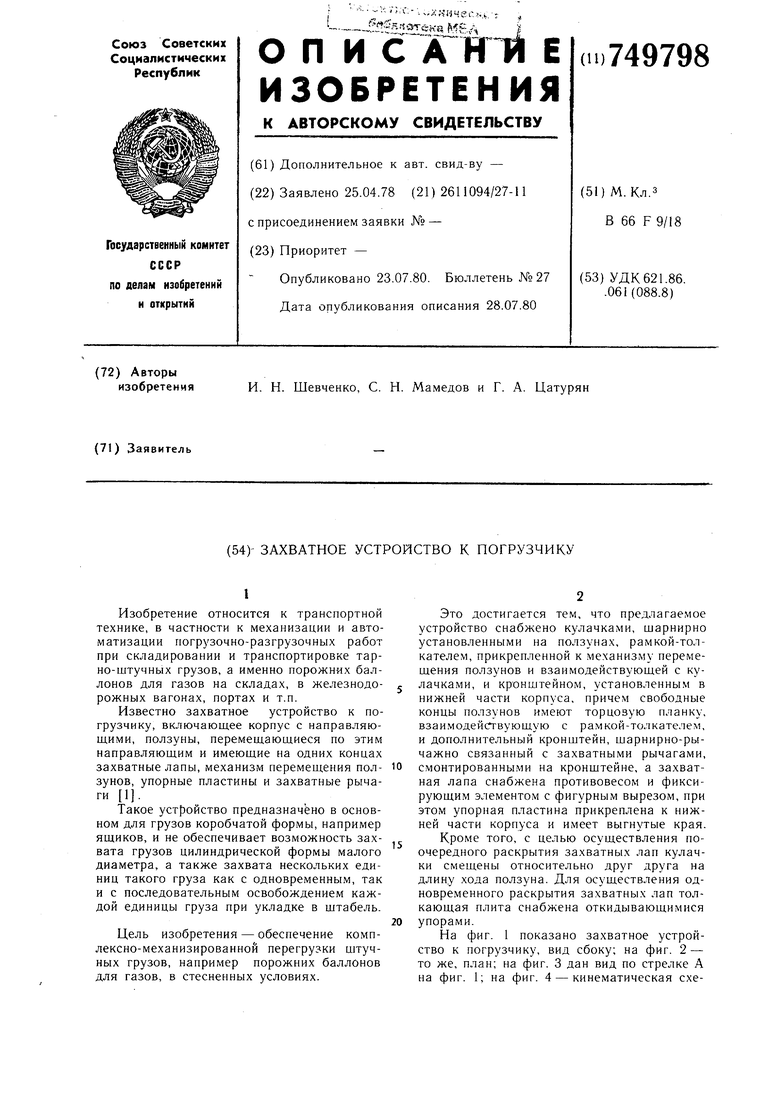


| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1989 |
|
SU1751138A1 |
| Переносной стеллаж | 1989 |
|
SU1675168A1 |
| Склад для штучных грузов на поддонах | 1977 |
|
SU691360A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Складной стоечный поддон | 1990 |
|
SU1781140A1 |
| Устройство для укладки штучных предметов в тару | 1977 |
|
SU738948A1 |
| Автоматический захват для штучных грузов | 1981 |
|
SU1013386A1 |
| Захватное устройство для грузов с такелажными кронштейнами | 1990 |
|
SU1736903A1 |
| Механическая рука для транспортирования банок щелочных аккумуляторов | 1977 |
|
SU683898A1 |
| Машина для формирования штабеля штучных грузов | 1980 |
|
SU935413A1 |


la
Бид f(
чг.1 30
ГР
и
