1
(61)727551 (21)4725247/11 (22) 02.08.89 (46)15.10.92. Бюл. №38
(71)Конструкторское бюро транспортного машиностроения
(72)А.А. Николаенко, А.В. Николаев и С.С. Гурьев
(56) Авторское свидетельство СССР № 727551, кл. В 66 С 1/44, 1977.
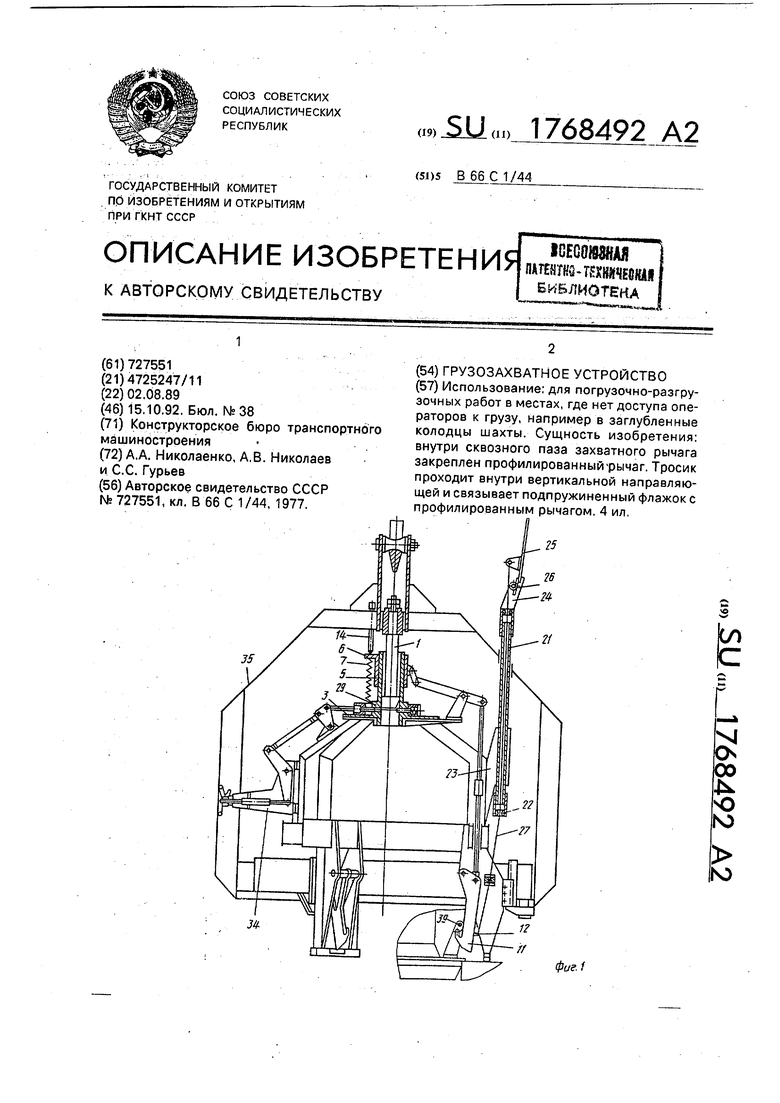
(54) ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО (57) Использование: для погрузочно-разгру- зочных работ в местах, где нет доступа операторов к грузу, например в заглубленные колодцы шахты. Сущность изобретения: внутри сквозного паза захватного рычага закреплен профилированный рычаг. Тросик проходит внутри вертикальной направляющей и связывает подпружиненный флажок с профилированным рычагом. 4 ил
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1393760A2 |
| Грузозахватное устройство | 1977 |
|
SU727551A1 |
| ТЯГА С ЗАПОРНЫМ УСТРОЙСТВОМ | 2003 |
|
RU2235671C1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Захватное устройство для грузов с такелажными кронштейнами | 1990 |
|
SU1736903A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Грузозахватное устройство для монтажа строительных конструкций | 1974 |
|
SU557034A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Грузозахватное устройство | 1990 |
|
SU1798290A1 |
35
М
25
сл
с
SJ
о
00
JSw
Ю
Ю
Ю
фиг f
Изобретение относится к грузозахватным средствам и может быть использовано для погрузочно-разгрузочных работ в местах, где нет доступа операторов к грузу, например в заглубленные колодцы, шахта. Указанное изобретение является усовершенствованием известного устройства, описанного в авт.св. № 727551.
В основном изобретении, по авт.св, № 727551,кл. В 66 С 1/44, содержится основание, связанн;ь.1й(Ь рсновЬнием ползун, в котойом установлены с возможностью переi ./«V t li
мещения вертикальный шток, к которому присб едиШн З ггриспособлёние для подвески устройства к крану, шарнирно закрепленные на основании захватные рычаги, соединенные с ползуном посредством тяг и двуплечих рычагов, и механизм фиксации захватных рычагов. При этом на верхней части ползуна выполнен фланец, соединенный с основанием пружиной, а на штоке установлен упор, взаимодействующий с фланцем, а механизм фиксации содержит охватывающую шток каретку, с одной сторо- н ы которой установлен подпружиненный палец, взаимодействующий со штоком, а с другой - дополнительный палец с прикрепленным к нему рычажным приводом перемещения каретки.
При наличии разветвленного рычажного привода захватных рычагов, позволяющего срабатывать им раздельно, отсутствие информации о захвате груза за все такелажные элементы, а также отсутствие доступа к расположенному сбоку устройства рычажному механизму привода механизма фиксации, при нахождении устройство в шахте и необходимости отстыковываться от груза, являются эксплуатационными недостатками этого устройства.
Цель изобретения - расширение эксплуатационных возможностей путем обеспечения контроля за захватом груза захватными рычагами в стесненных условиях шахты.
Поставленная цель достигается тем, что в грузозахватном устройстве по а.с. N 727551 по крайней мере один захватный рычаг выполнен с внутренним сквозным пазом, а устройство снабжено профилированным рычагом, шарнирно закрепленным в упомянутом пазу, вертикальной направляющей, прикрепленной к основанию, шарнирно присоединенным в верхней части направляющей подпружиненным флажком и расположенным в направляющей и присоединенным одним концом к флажку, а другим к профилированному рычагу тросиком.
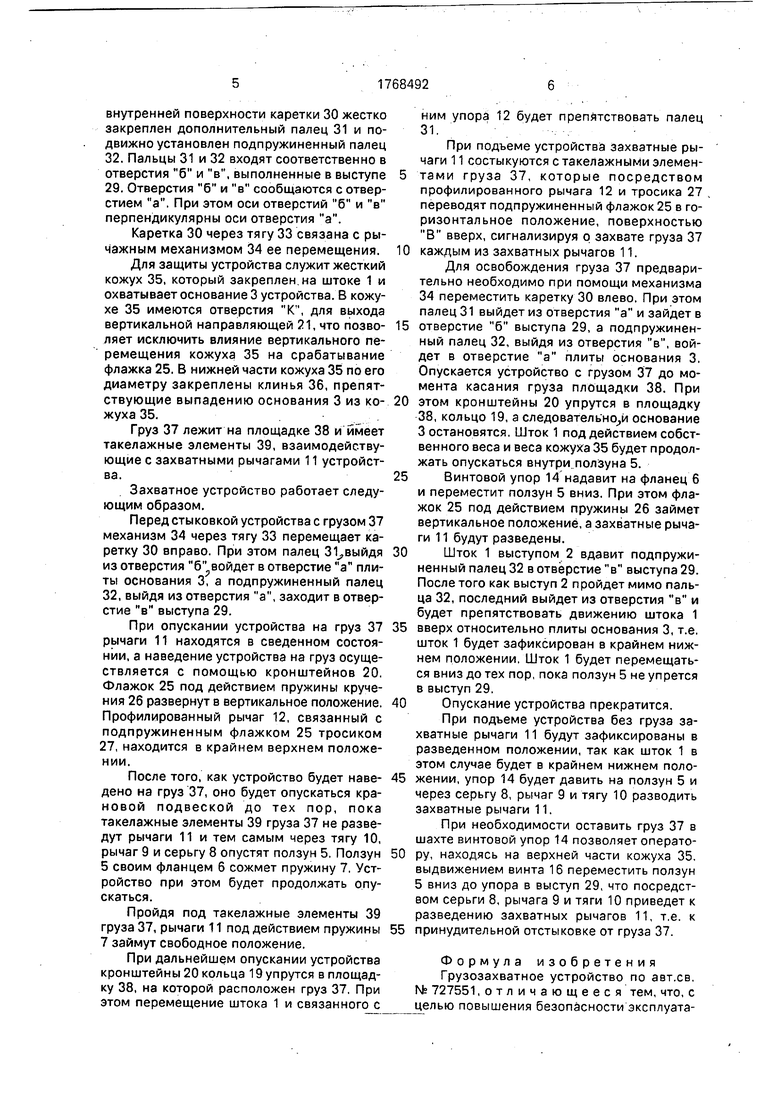
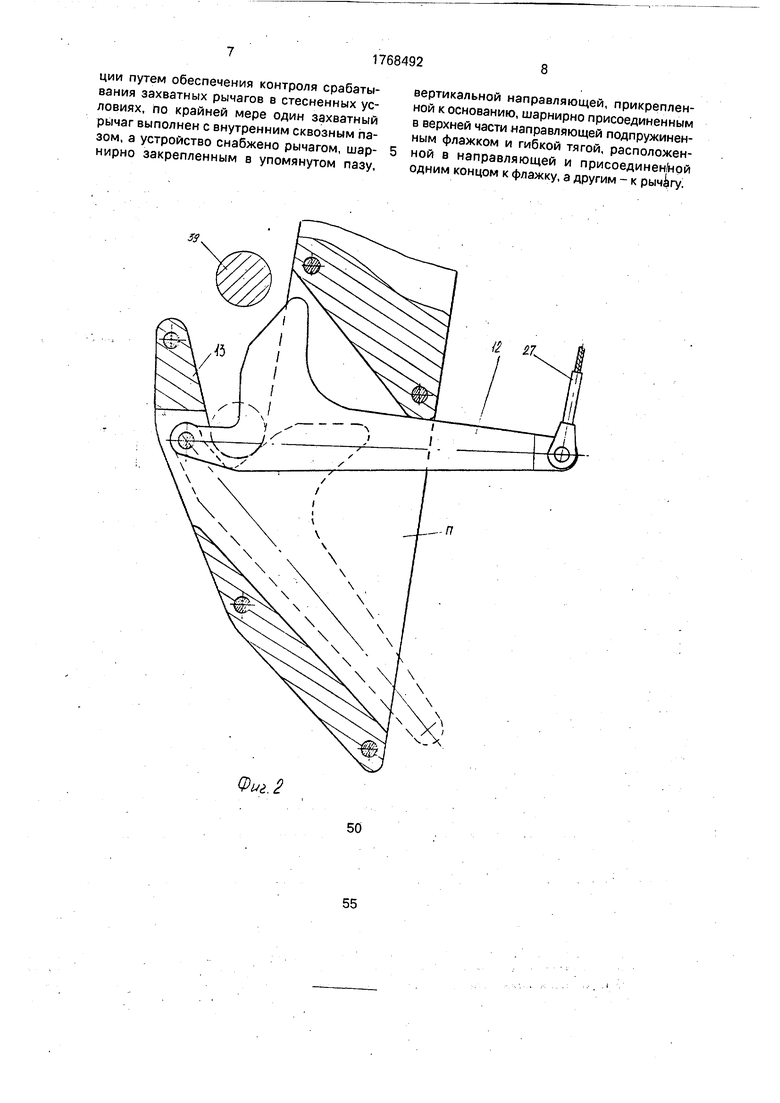
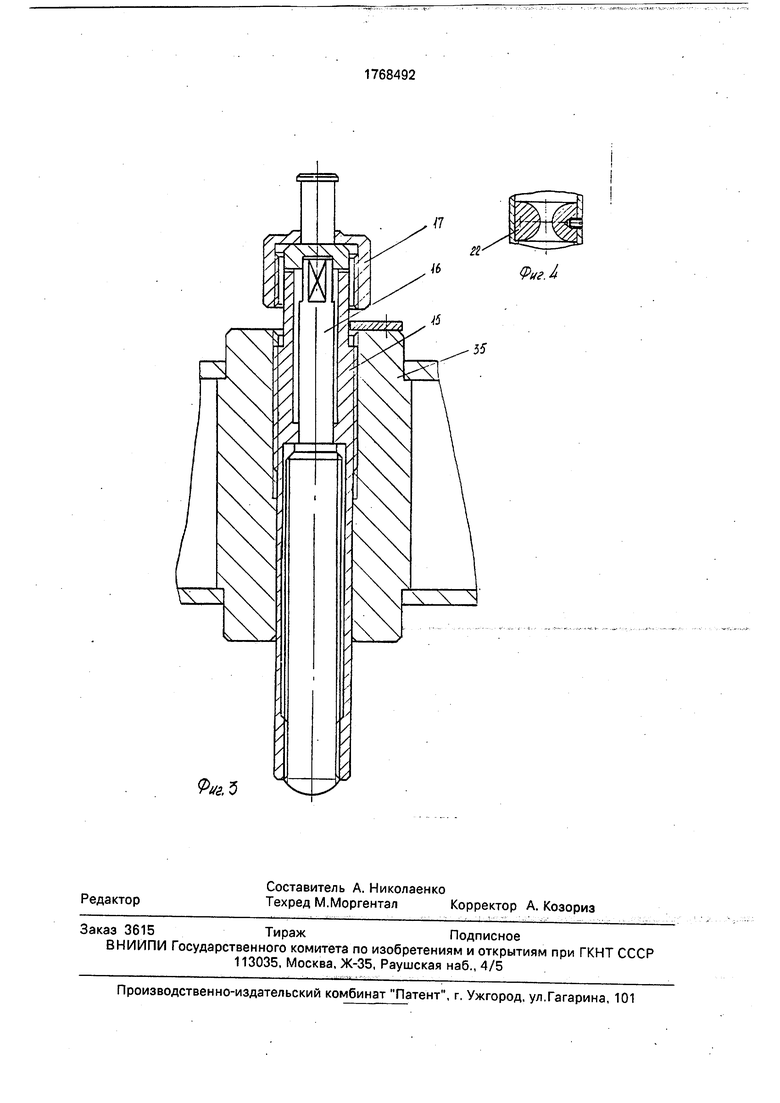
На фиг.1 показано грузозахватное устройство в разрезе; на фиг.2 - захватный
рычаг с профилированным рычагом; на фиг.З - винтовой упор; на фиг.4 - тороидная втулка.
Грузозахватное устройство содержит
5 шток 1, имеющий на нижнем конце цилиндрический выступ 2, заходящий в отверстие а основания 3, Верхним концом шток соединен с кронштейном 4 крановой подвески и установлен с возможностью возвратно0 поступательного перемещения в ползуне 5. Ползун снабжен фланцем 6. Между фланцем 6 и основанием 3 установлена пружина 7. Ползун 5 через серьгу 8, рычаг 9 и регулируемую тягу 10 связан с захватным рыча5 гом 11.
Рычаг 11 выполнен с внутренним сквозным пазом П, в котором установлен профилированный рычаг 12, шарнирно закрепленный в роге 13 и перекрывающий
0 зев рычага.
Консольно относительно штока 1 расположен винтовой упор 14, который связан со штоком 1 и взаимодействуете фланцем ползуна 5. Упор 12 состоит из корпуса 15, винта
5 16 и стопорной накидной гайки 17.
Накидная гайка 17 препятствует самопроизвольному вывинчиванию винта 16.
Основание 3 представляет собой ферменную конструкцию, состоящую из плиты,
0 к которой прикреплены стойки 18, закрепленные противоположными концами на кольце 19 коробчатого сечения. На нижней стороне кольца 19 по его диаметру закреплены направленные вниз кронштейны 20.
5 Внутренняя поверхность кронштейнов 20 выполнена наклонной с образованием кону-, са с направленной вверх вершиной и осью, совпадающей с продольной осью устройства. В кронштейне 20 и вертикальной на0 правляющей 21 установлены обводные блоки 22. На кольце 19 установлены стойки 23, в каждой из которых закреплена вертикальная направляющая 21. В верхней части вертикальной направляющей 21 располо5 жен кронштейн 24 с шарнирно установленным флажком 25, поверхность И которого окрашена в яркий цвет, Между флажком 25 и кронштейном 24 установлена пружина кручения 26.
0 Тросик 27 пропущен через обводные блоки 22 кронштейна 20 и вертикальной направляющей 21 и связывает флажок 25 с профилированным рычагом 12.
Обводные блоки 22 выполнены в виде
5 втулок с замкнутой тороидной поверхностью, что предотвращает соскальзывание тросика с блока.
На основании 3 имеется выступ 29 и установлен механизм фиксации, состоящий
из охватывающей выступ 29 каретки 30. На
внутренней поверхности каретки 30 жестко закреплен дополнительный палец 31 и подвижно установлен подпружиненный палец 32. Пальцы 31 и 32 входят соответственно в отверстия б и в, выполненные в выступе 29. Отверстия б и в сообщаются с отверстием а. При этом оси отверстий б и в перпендикулярны оси отверстия а.
Каретка 30 через тягу 33 связана с рычажным механизмом 34 ее перемещения.
Для защиты устройства служит жесткий кожух 35, который закреплен на штоке 1 и охватывает основание 3 устройства. В кожухе 35 имеются отверстия , для выхода вертикальной направляющей 21, что позволяет исключить влияние вертикального перемещения кожуха 35 на срабатывание флажка 25. В нижней части кожуха 35 по его диаметру закреплены клинья 36, препятствующие выпадению основания 3 из кожуха 35.
Груз 37 лежит на площадке 38 и имеет такелажные элементы 39, взаимодействующие с захватными рычагами 11 устройства.
Захватное устройство работает следующим образом.
Перед стыковкой устройства с грузом 37 механизм 34 через тягу 33 перемещает каретку 30 вправо. При этом палец З выйдя из отверстия б войдет в отверстие а плиты основания 3, а подпружиненный палец 32, выйдя из отверстия а, заходит в отверстие в выступа 29.
При опускании устройства на груз 37 рычаги 11 находятся в сведенном состоянии, а наведение устройства на груз осуществляется с помощью кронштейнов 20. Флажок 25 под действием пружины кручения 26 развернут в вертикальное положение. Профилированный рычаг 12, связанный с подпружиненным флажком 25 тросиком 27, находится в крайнем верхнем положении.
После того, как устройство будет наведено на груз 37, оно будет опускаться крановой подвеской до тех пор, пока такелажные элементы 39 груза 37 не разведут рычаги 11 и тем самым через тягу 10, рычаг 9 и серьгу 8 опустят ползун 5. Ползун 5 своим фланцем 6 сожмет пружину 7. Устройство при этом будет продолжать опускаться.
Пройдя под такелажные элементы 39 груза 37, рычаги 11 под действием пружины 7 займут свободное положение.
При дальнейшем опускании устройства кронштейны 20 кольца 19 упрутся в площадку 38, на которой расположен груз 37. При этом перемещение штока 1 и связанного с
ним упора 12 будет препятствовать палец 31.
При подъеме устройства захватные рычаги 11 состыкуются с такелажными элементами груза 37, которые посредством профилированного рычага 12 и тросика 27 переводят подпружиненный флажок 25 в го- ризонтальное положение, поверхностью В вверх, сигнализируя о захвате груза 37
каждым из захватных рычагов 11.
Для освобождения груза 37 предварительно необходимо при помощи механизма 34 переместить каретку 30 влево. При этом палец 31 выйдет из отверстия а и зайдет в
отверстие б выступа 29, а подпружиненный палец 32, выйдя из отверстия в, войдет в отверстие а плиты основания 3. Опускается устройство с грузом 37 до момента касания груза площадки 38. При
этом кронштейны 20 упрутся в площадку 38, кольцо 19, а следовательно основание 3 остановятся, Шток 1 под действием собственного веса и веса кожуха 35 будет продолжать опускаться внутри ползуна 5.
Винтовой упор 14 надавит на фланец 6 и переместит ползун 5 вниз. При этом флажок 25 под действием пружины 26 займет вертикальное положение, а захватные рычаги 11 будут разведены.
Шток 1 выступом 2 вдавит подпружиненный палец 32 в отверстие в выступа 29. После того как выступ 2 пройдет мимо пальца 32, последний выйдет из отверстия в и будет препятствовать движению штока 1
вверх относительно плиты основания 3, т.е. шток 1 будет зафиксирован в крайнем нижнем положении. Шток 1 будет перемещаться вниз до тех пор, пока ползун 5 не упрется в выступ 29.
Опускание устройства прекратится.
При подъеме устройства без груза захватные рычаги 11 будут зафиксированы в разведенном положении, так как шток 1 в этом случае будет в крайнем нижнем положении, упор 14 будет давить на ползун 5 и через серьгу 8, рычаг 9 и тягу 10 разводить захватные рычаги 11.
При необходимости оставить груз 37 в шахте винтовой упор 14 позволяет оператору, находясь на верхней части кожуха 35, выдвижением винта 16 переместить ползун 5 вниз до упора в выступ 29, что посредством серьги 8, рычага 9 и тяги 10 приведет к разведению захватных рычагов 11, т.е. к
принудительной отстыковке от груза 37.
Формула изобретения Грузозахватное устройство по авт.св. № 727551 .отличающееся тем, что, с целью повышения безопасности эксплуатации путем обеспечения контроля срабатывания захватных рычагов в стесненных условиях, по крайней мере один захватный рычаг выполнен с внутренним сквозным пазом, а устройство снабжено рычагом, шар- нирно закрепленным в упомянутом пазу,
59
Ф.2
вертикальной направляющей, прикрепленной к основанию, шарнирно присоединенным в верхней части направляющей подпружиненным флажком и гибкой тягой, расположенной в направляющей и присоединен/ной одним концом к флажку, а другим - к рычагу.
