В качестве преобразователя перемеще-. 20 массам подвижных частей. Так
ния используется емкостной датчик. Чувствительные элементы преобразователя перемещения выполнены в виде четырех больших секторов 8, между которыми расположены узкие секторы
9,выполняющие роль экрана. Все сектора закреплены в изолирующем кольце
10.К силонриемной плите 4 с помощью пластин 11 крепится подвижная относи25
собственные частоты подвижных равны, их относительное перем равно нулю, что уменьшает дин кую погрешность. При воздейст обрабатьгааемую деталь силы ре относительное перемещение дета преобразователя становится отл от нуля. Изменение зазора межд торами 8 и втулкой 12, вызван меряемой силой, приводит к изм емкости, которая далее преобр в электрический сигнал емкост лителем (не показан),
тельно корпуса 7 втулка 12, которая располагается внутри цилиндра, образованного секторами 8 и 9, Каждая из диаметрально расположенных пар больших секторов 8 совместно с втулкой 12 и элементами электрической балансировки образует дифференциальный емкостной полумост (не показан), На корпусе 7 установлены щпильки 13, несущие сменные грузы 14, служащие для корректировки собственной частоты колебаний преобразователя перемещения, В подвижной направляющей 15 вы полнены пазы, охватывающие упругие стойки 6, Перемещение и фиксации подкак
5
0
5
0
собственные частоты подвижных частей равны, их относительное перемещение равно нулю, что уменьшает динамическую погрешность. При воздействии на обрабатьгааемую деталь силы резания относительное перемещение детали и преобразователя становится отличным от нуля. Изменение зазора между секторами 8 и втулкой 12, вызванное измеряемой силой, приводит к изменению емкости, которая далее преобразуется в электрический сигнал емкостным усилителем (не показан),
Формула изобретения
Динамометр для измерения сил резания, содержащий основание, соединенное с силоприемной плитой упругими элементами, отличающийся тем, что, с целью повьш1ения точности измерения в динамическом режиме, в него введены преобразователе перемещения, состоящий из корпуса, соеди
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамометр для измерения сил резания | 1990 |
|
SU1732194A1 |
| Динамометр | 1981 |
|
SU1052892A1 |
| Стенд для динамических испытаний пневматической шины | 1983 |
|
SU1132177A1 |
| Стенд для динамических испытаний пневматической шины | 1990 |
|
SU1795336A1 |
| Датчик крутильных колебаний | 2016 |
|
RU2615915C1 |
| СИСТЕМА ДЛЯ АКТИВНОГО КОНТРОЛЯ РАЗМЕРОВ ДЕТАЛЕЙ И РЕГУЛИРОВАНИЯ ДЕФОРМАЦИЙ КРУГЛОШЛИФОВАЛЬНОГО СТАНКА | 1989 |
|
RU2014208C1 |
| Тензометрический линейный акселерометр | 2024 |
|
RU2835899C1 |
| Силоизмерительное устройство | 1978 |
|
SU979898A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕСА ЗАРЯДОВ | 1985 |
|
RU2047112C1 |
| СПОСОБ И ОСНАСТКА ДЛЯ ИЗГОТОВЛЕНИЯ ЛИТЕЙНЫХ СТЕРЖНЕЙ | 2011 |
|
RU2481918C2 |
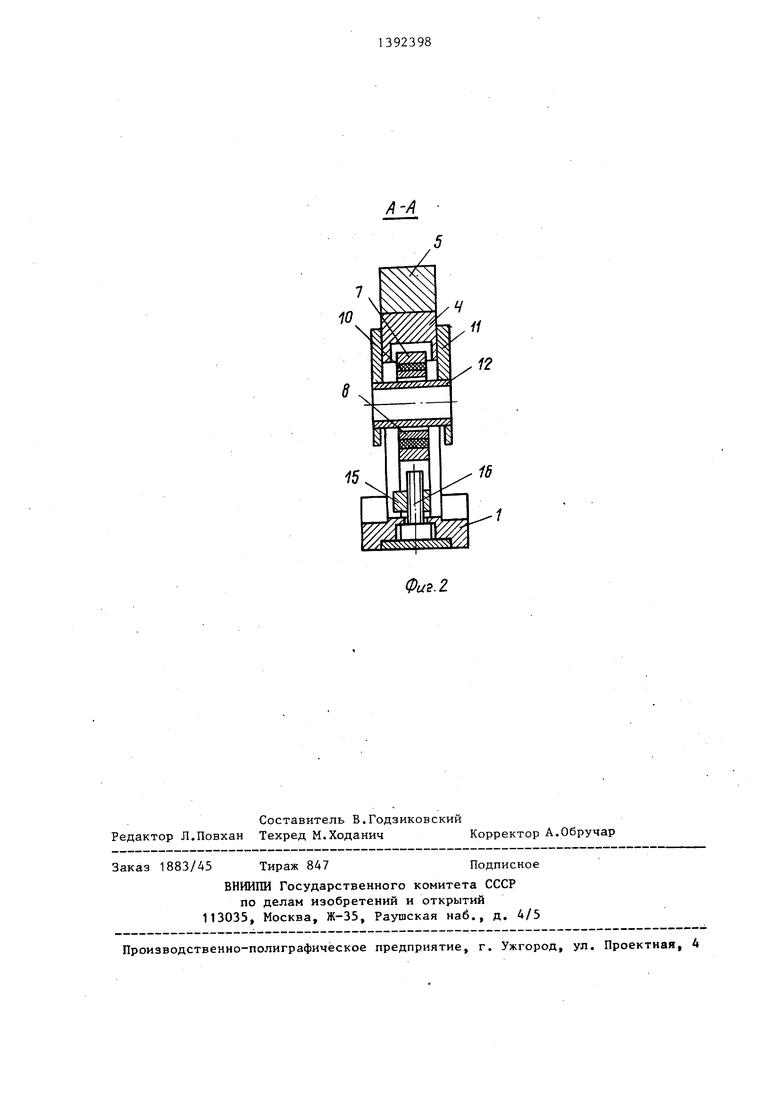
Изобретение относится к силоиз- мерительной технике и позволяет повысить точность измерения в динамическом режиме. Преобразователь перемещения представляет собой корпус 7, соединенный с основанием посредством упругих стоек 6, и втулку 12, жестко соединенную с силоприемной плитой 4, Настройку собственной частоты колебаний преобразователя перемещений после установки на плиту 4 обрабатываемой детали 5 осуществляют изменением массы сменных грузов 14, Для подстройки этой частоты при изменении массы детали 5 перемеп5ают подвижную направляющую 15. Воздействие на деталь 5 силы резания приводит к изменению емкости за счет изменения зазора между секторами 8 чувствительного элемента преобразователя перемещения и втулкой 12. 2 ил, С с (f, с
вижной направляющей 15 вдоль упругих д немного с основанием посредством упстоек 6 осуществляется микрометрическим винтом 16,
Динамометр работает следующим образом.
ругих стоек, и подвижный относительно корпуса втулки, жестко соединенной с силоприемной плитой, а также сменные грузы, размещенные на корпусе преобПри установке обрабатываемой дета--- разователя, и подвижная направляющая.
ли 5 производят настройку собственной частоты колебаний преобразователя изменением массы грузов 14 таким образом, что при повороте динамометра .на 90° вокруг оси преобразователя пере- „ мещения силоприемная плита 4 с деталью 5 и корпус преобразователя 7 смещаются под действием собственного
соединенная с упругими стойками с возможностью перемещения и фиксации, при этом собственная частота колебаний силоприемной плиты с обрабатываемой деталью выбрана равной собственной частоте колебаний корпуса преобразователя перемещения со сменными , грузами.
ругих стоек, и подвижный относительно корпуса втулки, жестко соединенной с силоприемной плитой, а также сменные грузы, размещенные на корпусе преобсоединенная с упругими стойками с возможностью перемещения и фиксации, при этом собственная частота колебаний силоприемной плиты с обрабатываемой деталью выбрана равной собственной частоте колебаний корпуса преобразователя перемещения со сменными , грузами.
//
12
Фиъ.г
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| и др | |||
| Силомоментные датчики для робототехнических систем, ч | |||
| I | |||
| Датчики, размещенные на манипуляторе,М.: Институт проблем передачи информации, 1984, с.44, рис.3.4 | |||
| Полетика М.Ф | |||
| Приборы для измерения сил резания и крутящих моментов | |||
| М.: Машгиз, 1963, с, 66-79. | |||
