Изобретение относится к учебным наглядным пособиям и служит для демонстрации движения глазного яблокэо
Цель изобретения - повышение точ- ности выполнения заданных команд пособием
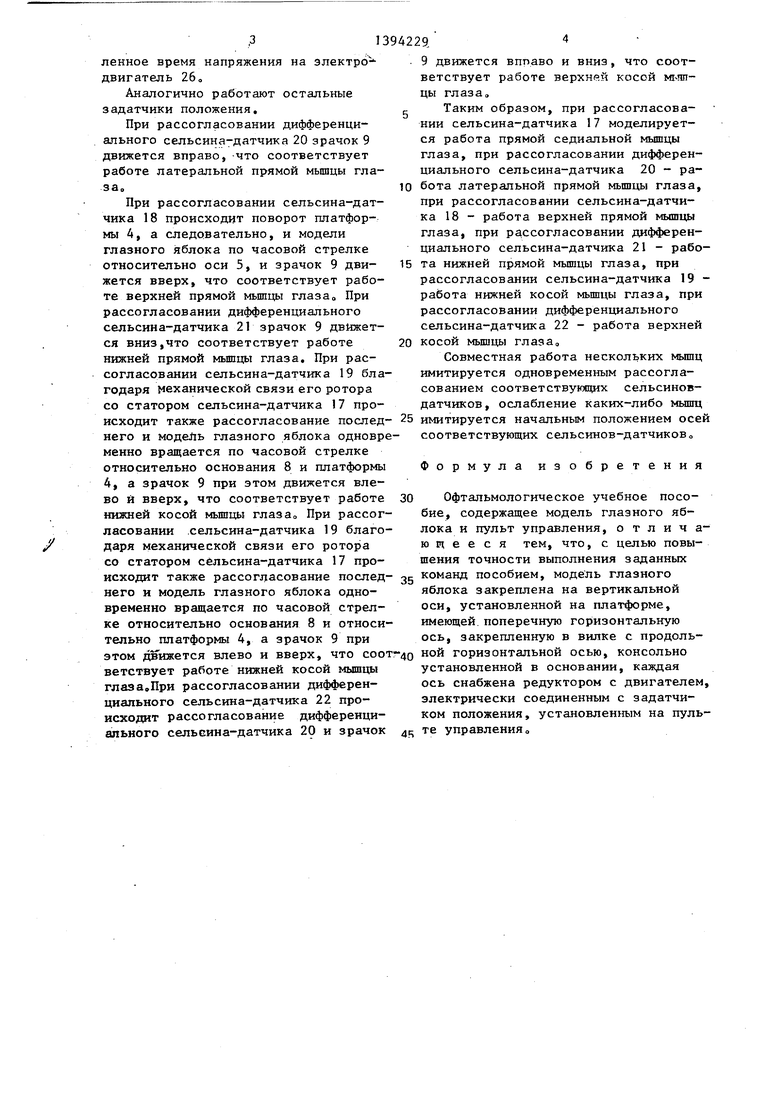
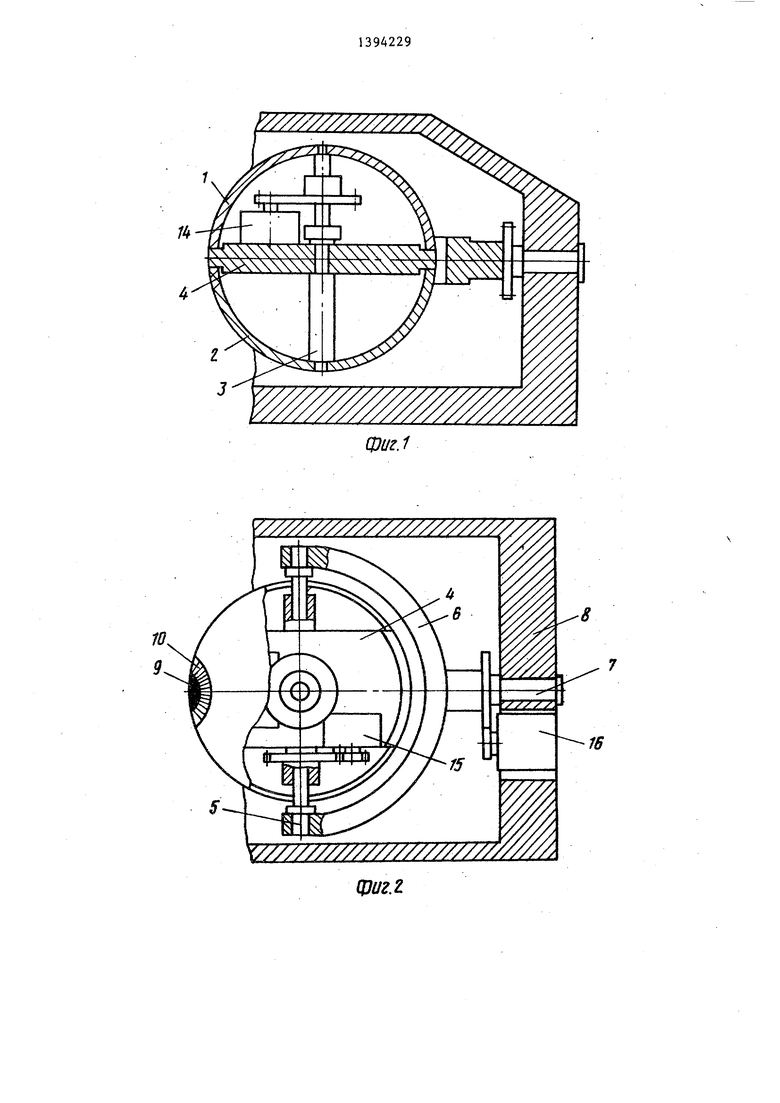
На фиГо изображено предложенное офтальмологическое пособие, вид сбоку; на фиГо2 - то.же, вид сверху; на фиГоЗ - пособиеэ аксонометрия; на фиг о 4 - блок-схема двигателя, редуктора и задатчика положения
Офтальмологические пособия содержат модель глазного яблока, сое- тоящего из верхней 1 и нижней 2 полусфер, жестко закрепленных на вертикальной оси 3 и опирающихся на платформу 4 о Ось 3 установлена .на платформе 4 и имет возможность враще ния относительно нее о Платформа 4 установлена на поперечной горизонтальной оси 5, жестко закрепленной в концах вилки .6s и имеет возможност вращения на оси 5,, Вилка 6 в центре пересечения осей жестко соединена с продольной горизонтальной осью 7, установленной в основании 8, имитирующем глазницу о О.сь 7 может, вращаться в основании 8 Для придания ана- томической наглядности на полусферы модели глазного яблока нанесены изображения зрачка 9 и радужки Ю
В качестве элементов, обеспечивающих движение модели глазного ябло- Kaj использованы следящие системы 11- 13, содержащие приводы , сельсины-датчики 17-19 и дифференциальные сельсины-датчики 20-22 Сельсины-дат- ,чики 17-19 и дифференциальные сель- сины-датчики 20-22 совместно с усилителями 23-25 размещены в пульте управления, а приводы 14 и 15 - на платформе 4 внутри модели глазного яблока и привод 16 - на основании 8о Привод 14 обеспечивает вращение вер-, тикальной оси 3 относительно платфор- dbi 4, привод 15 - платформы 4 относительно оси 5 и вилки 6, а привод 16 - оси 7 с вилкой 6 относительно осно- вания В Роторы сельсина-датчика 19 и дифференциального сельсина-датчика 22 механически соединены соответственно со статорами дифференциального сельсина-датчика 20 и сельсина- датчика 17
В состав каждого привода 14-16 входят соответственно двигатели 2628, редукторы 29-31 и сельсины-приемники 32-34 о
Роторные обмотки сбльсина-датчи- ка 17 электрически соединены со статорными обмотками сельсина-датчика 20, роторные обмотки сельсина- датчика 20 - с роторными обмотками сельсина-приемника 32, статорная обмотка сельсина-приемника 32 - с входом усилителя 23, выход усилителя 23 - с электродвигателем 26„ На ста торную обмотку сельсина-датчика 17 подано питающее напряженнее Электродвигатель 26 механически через редуктор 29 соединен с осью ротора сельсина-приемника 32 и вертикальной осью 3, на которой закреплена модель глазного яблока Сельсин-датчик 17, . дифференциальный сельсин-датчик 20, сельсин-приемник 32 и усилитель 23 образуют задатчик положения. Аналогичен состав остальных датчиков положения
Подводка электрических сигналов и питающего напряжения к приводам 14 и 15 осуществляется через вращающиеся контакты (не показ-ано).
Офтальмологическое пособие работает следующим-образом
Нулевое положение сельсииов-датчи 17-19 и дифференциальных сельсинов датчиков 20-22 соответствует исходному положению зрачка 9 При рассогласовании сельсина-датчика 17 путем поворота его ротора на некоторый УГО.Л в статорной обмотке сельсина- датчика 32 возникает напряжение рас - согласования, которое усиливается усилителем 23 и подается в электродвигатель 26 в такой фазе, что при вращении электродвигателя 26 ротор сельсина-приемника 32 поворачивает- ся так, что возникшее в статоре напряжение рассогласования за счет поворота ротора сельсина-датчика 17 начинает уменьшаться и стает .равным нулю, пока ротор сельсина-приемника 32 не повернется точно на такой же угол, на какой повернут ротор сельсина-датчика 17, и электродвигатель 26 остановится А так как ось ротора сельсина 32 механически связана с вертикальной осью 3, на которой закреплены полусферы модели глазного яблока, на такой же точно угол поворачивается и модель глазного ябло- ка,, Положение модели глазного яблока может задаваться подачей на опреде
ленное время напряжения на электро двигатель 26,
Аналогично работают остальные задатчики положения.
При рассогласовании дифференциального сельсина-датчика 20 зрачок 9 движется вправо, -что соответствует работе латеральной прямой мьшцы глаза.
При рассогласовании сельсина-датчика 18 происходит поворот платформы 4, а следовательно, и модели глазного яблока по часовой стрелке относительно оси 5, и зрачок 9 движется вверх, что соответствует работе верхней прямой мьшцы глазао При рассогласовании дифференциального сельсина-датчика 21 зрачок 9 движется вниз,что соответствует работе нижней прямой мьшцы глаза. При рассогласовании сельсина-датчика 19 благодаря механической связи его ротора со статором сельсина-датчика 7 происходит также рассогласование последнего и модель глазного яблока одновременно вращается по часовой стрелке относительно основания 8 и платформы 4, а зрачок 9 при этом движется влево и вверх, что соответствует работе нижней косой мьшцы глаза При рассогласовании .сельсина-датчика 19 благодаря механической связи его ротора со статором сельсина-датчика 17 происходит также рассогласование последнего и модель глазного яблока одновременно вращается по часовой стрелке относительно основания 8 и относительно платформы 4, а зрачок 9 при этом даижется влево и вверх, что соответствует работе нижней косой мышцы глаза,При рассогласовании дифференциального сельсина-датчика 22 происходит рассогласование дифференциального сельсииа-датчика 20 и зрачок
9 движется вправо и вниз, что соответствует работе верхнр.й косой Mi-roi- цы глаза,
Таким образом, при рассогласовании сельсина-датчика 17 моделируется работа прямой седиальной мьшцы глаза, при рассогласовании дифференциального сельсина-датчика 20 - работа латеральной прямой мьшцы глаза, при рассогласовании сельсина-датчика 18 - работа верхней прямой мышцы глаза, при рассогласовании дифференциального сельсина-датчика 21 - работа нижней прямой мьшцы глаза, при
рассогласовании сельсина-датчика 19 - работа нижней косой мьшцы глаза, при рассогласовании дифференциального сельсина-датчика 22 - работа верхней
косой мьшцы глаза
Совместная работа нескольких мьшц имитируется одновременным рассогласованием соответствуюпщх сельсинов- датчиков, ослабление каких-либо мыпщ
имитируется начальным положением осей соответствующих сельсинов-датчиков.
Формула изобретения
Офтальмологическое учебное пособие, содержащее модель глазного ябока и пульт управления, отличающееся тем, что, с целью повыения точности выполнения заданных
команд пособием, модель глазного яблока закреплена на вертикальной оси, установленной на платформе, имеющей, поперечную горизонтальную ось, закрепленную в вилке с продольной горизонтальной осью, консольно установленной в основании, каждая ось снабжена редуктором с двигателем, электрически соединенным с задатчи- ком положения, установленным на пульте управления.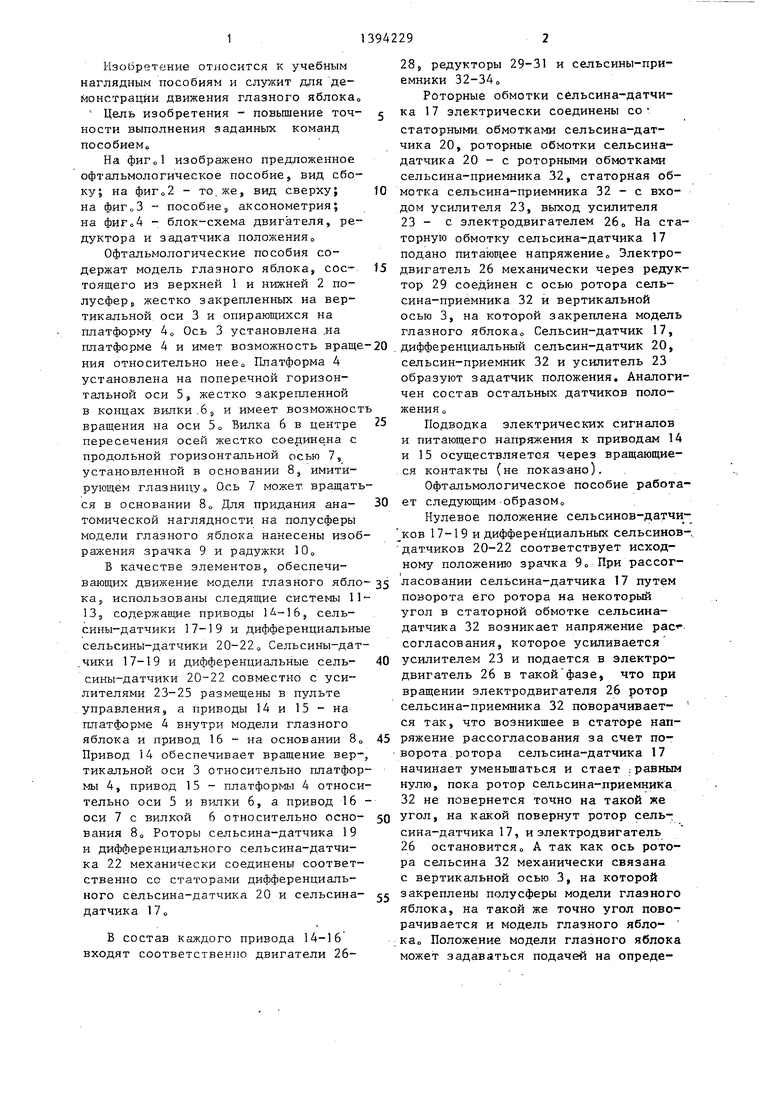
| название | год | авторы | номер документа |
|---|---|---|---|
| Офтальмологическое учебное пособие | 1986 |
|
SU1464197A1 |
| УСТРОЙСТВО для ОПРЕДЕЛЕНИЯ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ ОШИБОК СЕЛЬСИНОВ-ПРИЕМНИКОВ | 1973 |
|
SU368589A1 |
| Схема включения двух сдвоенных бескон-ТАКТНыХ СЕльСиНОВ | 1979 |
|
SU828201A1 |
| Устройство для дистанционной передачи угловых перемещений | 1987 |
|
SU1424046A1 |
| УСТРОЙСТВО для ШАГОВОГО ПЕРЕМЕЩЕНИЯ ИСПОЛНИТЕЛЬНОГО ОРГАНА СТАНКА | 1971 |
|
SU319403A1 |
| Офтальмологическое учебное пособие | 1985 |
|
SU1277175A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯДВИГАТЕЛЕМ КАНАТНОГО БАРАБАНА ОПУСКАТЕЛЯ- КАНТОВАТЕЛЯ НА УСТАНОВКЕ НЕПРЕРЫВНОЙ РАЗЛИВКИСТАЛИ | 1972 |
|
SU428848A1 |
| Пресс для гибки заготовок с растяжением | 1982 |
|
SU1107927A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| Офтальмологическое учебное пособие | 1980 |
|
SU890432A1 |
Изобретение предназначено для . офтальмологиио Цель изобретения повьшение точности выполнения заданных команд пособиеМс Пособие содержит модель глазного яблока, состоящего из верхней 1 и нижней 2 полусфер, жестко закрепленных на вертикальной оси Зо Платформа 4 установлена на поперечной оси 5, жестко закрепленной в концах вилки 6о На полусферы модели глазного яблока нанесены изображения зрачка 9 и радужки 10,, Для обеспечения движения модели глазного яблока использованы следящие системы, включающие в себя приводы 14-16, сельсины-датчики и дифференциальные сельсины-датчики . Совместная работа нескольких мышц имитируется одновременным рассогласованием соответствующих сельсинов-датчиков 4 ил о (Л со со 4 N) tN9 СО Фиг 3
фиг.1
фиг. г
Г
I
//
фиг.
| УЧЕБНОЕ ПОСОБИЕ ДЛЯ ДЕМОНСТРАЦИИ ХОДА ЛУЧЕЙ В КОРРЕГИРУЕМОМ ГЛАЗЕ | 0 |
|
SU167000A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
