Известно устройство для шагового перемещения исполнительного органа станка, привод которого управляется по сигналу сельсинаприемника, электрически связанного с сельсином-датчиком.
Предлагаемое устройство отличается тем, что ротор сельсина-датчика соединен с приводом через реверсивную передачу, а с сельсином-датчиком соединен дополнительный сельсин-приемник. Это исключает накопление ошибок при любом количестве шагов.
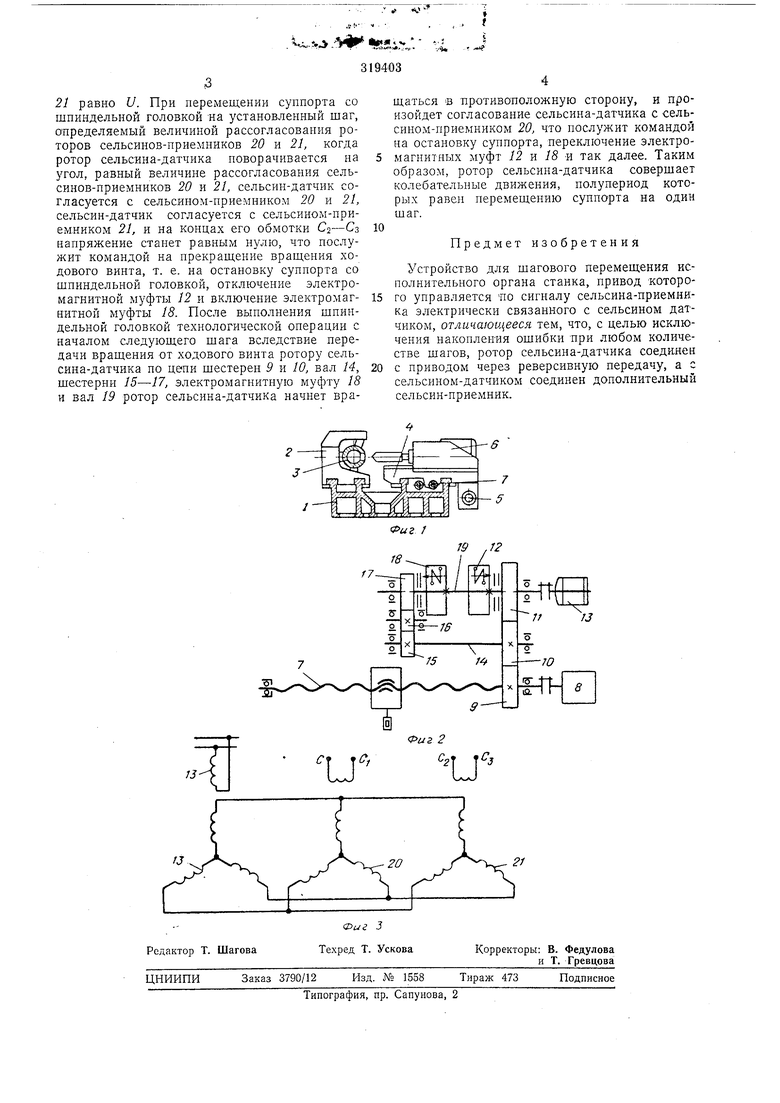
На фиг. 1 изображено предлагаемое устройство, поперечный разрез; на фиг. 2 - кинематическая схема реверсивного привода сельсина-датчика; на фиг. 3 - электрическая схема соединения сельсинов.
На станине / установлены люнеты 2, которые поддерживают обрабатываемый коллектор 5. По направляющим станины вдоль обрабатываемого коллектора перемещаются суппорты 4, по поперечным направляющим которых при помощи привода перемещаются шпиндельные головки 6. Каждый суппорт снабжен ходовым винтом 7. К обоим торцам станины закреплены приводы 8 ходовых винтов. Ходовой винт через шестерни 9-11 и включенную электромагнитную муфту 12 соединен с ротором сельсина-датчика 1. Соединение ходового винта с ротором сельсина-датчика может осуществляться также через шеетерни 9 и 10, вал 14, шестерни 15-17 и включенную электромагнитную муфту 18, установленную на валу 19 также, как и электромагнитная муфта 12. Шестерня 9 и 10, 15 и 16 жестко закреплены на валах. Шестерни 1Г и 17 жестко соединяют с валом 19 или свободна вращаются на нем. Передаточные отношения цепей шестерен 9-11 и 10, 11 и 15 равны по величине и противоположны по знаку. Сельсин-датчик соединен с двумя сельсинами-приемниками 20 и 21 (см. фиг. 3) и работает с ними в трансформаторном режиме. Роторы сельсинов-приемников 20 и 21 заторможены со сдвигом на угол, равный углу, на который повернется вал 19 при перемещении суннорта со шпиндельной головкой на необходимый шаг вдоль обрабатываемого коллектора. После выполнения технологической операции шпиндельная головка приводом подач возвращается на быстром ходу в исходное полол ение, что служит командой на включение привода вращения ходового винта. Винт вращаясь, перемещает суппорт со шпиндельной головкой на шаг и по цепи шестерен 9-// и включенную электромагнитную муфту 12 передает вращение ротору сельсина-датчика, который в начальной точке шага согласован с сельсином-приемником 20 и напрял ение на концах его обмотки С-Cj равно нулю, а на концах обмотки Сг-Сз сельсина-приемника
21 равно и. При перемещении суппорта со шпиндельной головкой на установленный шаг, определяемый величиной рассогласования роторов сельсинов-приемников 20 и 21, когда ротор сельсина-датчика поворачивается на угол, равный величине рассогласования сельсинов-приемников 20 и 21, сельсин-датчик согласуется с сельсином-приемником 20 и 21, сельсин-датчик согласуется с сельсином-приемником 21, и на концах его обмотки Сз-Сз напряжение станет равным нулю, что послужит командой на прекращение вращения ходового винта, т. е. на остановку суппорта со шпиндельной головкой, отключение электромагнитной муфты 12 и включение электромагнитной муфты 18. После выполнения шпиндельной головкой технологической операции с началом следующего шага вследствие передачи вращения от ходового виита ротору сельсина-датчика по цепи шестерен 9 и 10, вал 14, шестерни 15-17, электромагнитную муфту 18 и вал 19 ротор сельсина-датчика начнет вра319403
щаться -в противоположную сторону, и произойдет согласование сельсина-датчика с сельсином-приемником 20, что послужит командой на остановку суппорта, переключение электромагнитных муфт 12 и 18 и так далее. Таким образом, ротор сельсина-датчика совершает колебательные движения, полупериод которых равен перемещению суппорта на один шаг.
Предмет изобретения
Устройство для шагового перемещения исполнительного органа станка, привод которого управляется По сигналу сельсина-приемника электрически связанного с сельсином датчиком, отличающееся тем, что, с целью исключения накопления ощибки при любом количестве щагов, ротор сельсина-датчика соединен
0 с приводом через реверсивную передачу, а с сельсииом-датчиком соединен дополнительный сельсин-приемник.
т-
-;/ /J
70
НТ
| название | год | авторы | номер документа |
|---|---|---|---|
| Токарный кулачковый автомат для нарезания торцовой резьбы | 1981 |
|
SU994170A1 |
| Шпиндельный узел расточного станка | 1984 |
|
SU1234062A1 |
| СТЕРЕОАВТОГРАФ | 1971 |
|
SU309241A1 |
| Резьбонарезной станок | 1984 |
|
SU1175630A1 |
| СТАНОК ПЛОСКОШЛИФОВАЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 1994 |
|
RU2080237C1 |
| Роторный автомат | 1989 |
|
SU1691065A1 |
| ПОЛУАВТОМАТИЧЕСКИЙ СТАНОК ДЛЯ НАРЕЗАНИЯ ВНУТРЕННИХ РЕЗЬБ МЕТЧИКАМИ | 1972 |
|
SU412999A1 |
| РАСТОЧНЫЙ СТАНОК | 1968 |
|
SU231299A1 |
| Станок для поперечного раскроя пиломатериалов | 1985 |
|
SU1293026A1 |
| Автомат для изготовления плоских спиральных пружин | 1975 |
|
SU534286A1 |
