Изобретение относится к транспортному машиностроению, в частности к автоматическим устройствам управления исполнительными механизмами, осуществляющими изменение положения транспортных средств в поперечной плоскости, например крутосклонных тракторов, платформ для транспортировки грузов с высоким расположением центра тяжести, судов. Известен автомат стабилизации положения транспортного средства, содержащий датчик крена, состоящий из подвещенного на горизонтальной оси маятника и связанного с ним гидравлического распределителя исполнительного механизма 1. Недостатком этого автомата стабилизации является значительное время запаздывания срабатывания из-за высокой степени деформирования колебаний маятника путем притормаживания его во всем диапазоне перемещений. Особенно опасны колебания маятника относительно исходного нейтрального положения, обусловленные превращением полученной маятником при крене потенциальной энергии в кинетическую, кинетической в потенциальную, потенциальной вновь в кинетическую и т. .д. Их опасность зак.1ючаётся в том, что они вызывают срабатывания механизма выравнивания то в одном, то в другом противоположном первому направлениях, причем прогрессирующих, поскольку эти срабатывания еще больще раскачивают маятник, а он, в свою очередь, - остов посредством механизма выравнивания (режим автоколебаний). Автоколебания нарушают нормальную работу системы стабилизации и могут привести к опрокидыванию транспортного средства. Цель изобретения - улучшение стабилизации транспортного средства путем устранения автоколебаний и повышени быстродействия автомата стабилизации. Указанная цель достигается тем, что автомат стабилизации положения транспортного средства, содержащий датчик крена, состоящий из подвешенного на горизонтальной оси маятника и связанного с ним гидравлического распределителя исполнительного механизма, снабжен вторым аналогичным первому датчиком крена, и двумя односторонними ограничителями хода маятника, один из которых установлен на одной из половин хода первого маятника, а другой - на противоположной половине хода второго маятника, причем выходы распределителей датчиков подключены параллельно к исполнительному механизму. На чертеже представлена схема автомата стабилизации и показано его подключение к управляемой им гидросистеме. Автомат стабилизации положения транспортного средства содержит два датчика крена, выполненных в виде подвешенных на горизонтальной оси 1 к остову 2 транспортного средства физических маятников 3 1 71 и 4, связанных посредством шарнирных тяг 5 и 6, с золотниками 7 и 8 двухпозиционных гидрораспределителей. Маятники 3 и 4 снабжены односторонними ограничителями 9 и 10 хода, один. (9) из которых установлен на одной половине хода (левой) маятника 3, а другой (10) на противоположной половине хода (правой) маятника 4. Это обеспечивает поочередное управление исполнительным механизмом 11, который выполнен в виде силового гидроцилиндра и присоединен к источникам 12 и 13 давления через, золотники 7 и 8, снабженные упорами 14 для фиксации их во включенных положениях. Автомат стабилизации содержит также сливы 15, предохранительные клапаны 1, отрегулированные на одно рабочее давление, запорный клапан 17 (гидрозамок) и демпферы 18. Устройство работает следующим образом. При движении транспортного средства по горизонтальной поверхности, оба маятника 3 и 4 занимают вертикал,ные поло жения, удерживая связанные с ними золотники 7 и 8 гидрораспределителей в исходных выключенных позициях, обеспечивающих подсоединение источников 12 и 13 давления на слив 15 и запирание полостей силового цилиндра запорным клапаном. 17. При крене транспортного средства на поперечном склоне, например, влево, маятник 4, стремясь вновь занять вертикальное положение, переместит золотник 8 гидрораспределителя налево, сообщив посредством него штоковую полость силового цилиндра с источником 13 давления, а поршневую полость - со сливом 15, приведя тем самым исполнительный механизм 11 в де 1ствие и обеспечив возвращение посредством него транспортного средства в вертикальное положение. Второй маятник 3 при этом находится в потоке, так как опирается на ограничитель 9, удерживая от перемещений золотник 7. Как только остов транспортного средства займет вертикальное положение, маятник 4, занимая также вертикальное положение, возвратит золотник выключенную позицию, заперев силовой цилиндр 11 от дальнейших перемещений и переключив источник 13 давления на слив 15. Накопленная маятником 4 при воз-, вращении в вертикальное положение кинетическая энергия уйдет в момент столкновения его с ограничителем 10 на удар и не вызовет дальнейших переключений золотника 8. При крене транспортного средства на склоне в противоположную сторону - вправо маятник 4, оцираясь на ограничитель 10 находится в покое, а управление гидросистемы осуществляет уже второй маятник 3, сообщив порщневую полость силового цилиндра 11 с источником 13 давления, а
штоковую - со сливом 15. Как только транс;портное средство займет посредством силового цилиндра 11 вертикальное положение, маятник 3 возвратится в вертикальное положение, погасив на удар об ограничитель 9 накопленную кинетическую энергию.
Возможные (хотя и маловероятно) колебания маятников в их промежуточных положениях гасятся демпферами 18, причем степень их демпфирования мала благодаря небольшой амплитуде колебаний маятников 3 и 4, а также потому, что значительная часть их кинетической энергии гасится при взаимодействии с упорами 9 и 10 .
Предлагаемый автомат стабилизации не только не в состоянии войти в режим автоколебаний, но и обладает значительно большим, по сравнению с известными, быстродействием.
Применение изобретения позволяет снизить время запаздывания системы стабилизации, например, крутосклонного трактора с 1,5 с до 0,5 сив результате поднять его рабочие скорости на склоне на 30-40%, повысив безопасность и улучшив условия труда водителя, а также обеспечить повышение производительности на 20-25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат-стабилизатор крутосклонного транспортного средства | 1980 |
|
SU948698A1 |
| Автомат-стабилизатор крутосклонногоТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU816801A1 |
| Автомат-стабилизатор крутосклонного транспортного средства | 1981 |
|
SU1031802A1 |
| Автомат-стабилизатор крутосклонного транспортного средства | 1982 |
|
SU1062029A1 |
| Колесное транспортное средство для работы на склонах | 1981 |
|
SU986815A1 |
| Маятниковый датчик крена крутосклонного транспортного средства | 1979 |
|
SU870206A1 |
| Механизм выравнивания крутосклонного трактора | 1980 |
|
SU893594A1 |
| Крутосклонное колесное транспортное средство | 1988 |
|
SU1593986A1 |
| Транспортное средство повышенной проходимости | 1983 |
|
SU1133127A1 |
| Механизм выравнивания крутосклонного трактора | 1981 |
|
SU1031800A2 |
АВТОМАТ СТАБИЛИЗАЦИИПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТ1ВА, содержащий датчик крана, состоящий из подвешенного на горизонтальной оси маятника и связанного с ним гидравлического распределителя исполнительного механизма, отличающийся тем, что, с целью улучшения стабилизации транспортного средства путем устранения автоколебаний и повышения быстродействия, он снабжен вторым аналогичным первому датчиком крана и двумя односторонними ограничителями хода маятников, один из которых установлен на одной из половин хода первого маятника, а другой - на противоположной половине хода второго маятника, причем выходы распределителей датчиков подключены параллельно к исполнительному механизму. (Л со N3 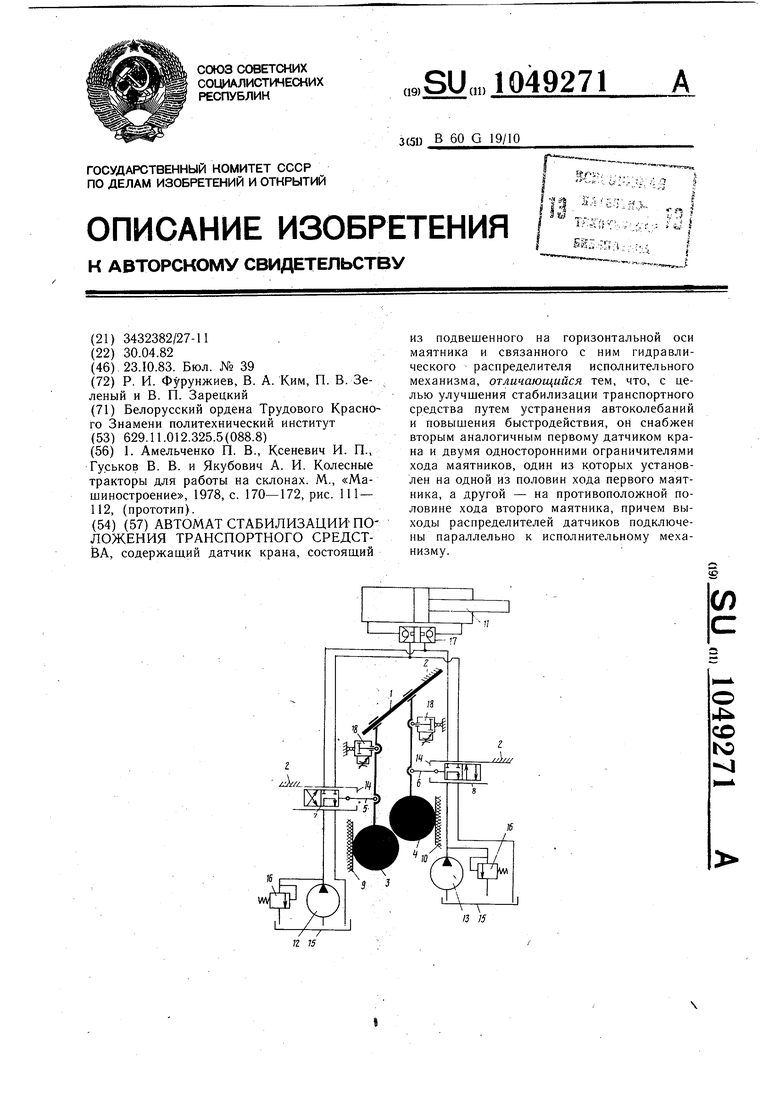
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Амельченко П | |||
| В., Ксеневич И | |||
| П., Гуськов В | |||
| В | |||
| и Якубович А | |||
| И | |||
| Колесные тракторы для работы на склонах | |||
| М., «Машиностроение, 1978, с | |||
| Аппарат для передачи фотографических изображений на расстояние | 1920 |
|
SU170A1 |
| Говорящий кинематограф | 1920 |
|
SU111A1 |
