(21)4011897/31-12
(22)23.01.86
(46) 23.05.88. Бюл. № 19
(71)Институт механики и сейсмостойкости сооружений им. М.Т.Уразбаева
(72)А.Д.Глущенко, М.Т.Ташболтаев, Б.Б.Тян, Е.В.Сливинский, М.Ф.Юлдашев, О,С.Аблялимов, А.И.Бобров, С.А.Неч- кин и В.А.Хон
(53)631 .358:633.511(088.8)
(56)Авторское свидетельство СССР № 799690, кл. А 01 D 46/14, 1979.
(54)МЕХАНИЗМ РЕГУЛИРОВАНИЯ РАБОЧЕЙ ЩЕЛИ ВЕРТИКАЛЬНО-ШПИНДЕЛЬНОГО ХЛОПКОУБОРОЧНОГО АППАРАТА
(57)Изобретение позволяет повысить эффективность использования хлопкоуборочной машины. При увеличении | ширины рабочей щели, вращают гайку 9 и перемещают стержень 7 для регулировки рабочей щели по стрелке А. Коленчатые толкатели В, воздействуя на подвижные рамки 4, перемещают их в продольном направлении по стрелке В, тем самым увеличивая ширину рабочей щели. Стержень 7 для регулировки рабочей щели, перемещаясь по стрелке А, воздействует на рычаги 11 и перемещает подвижные рамки в продольном направлении по стрелке С,- увеличивая межбарабакное расстояние. При уменьщении ширины рабочей щали процесс обратим с помоп1ью пружинь; 2 и подпружиненных телескопов 9. 2 ил.
ffi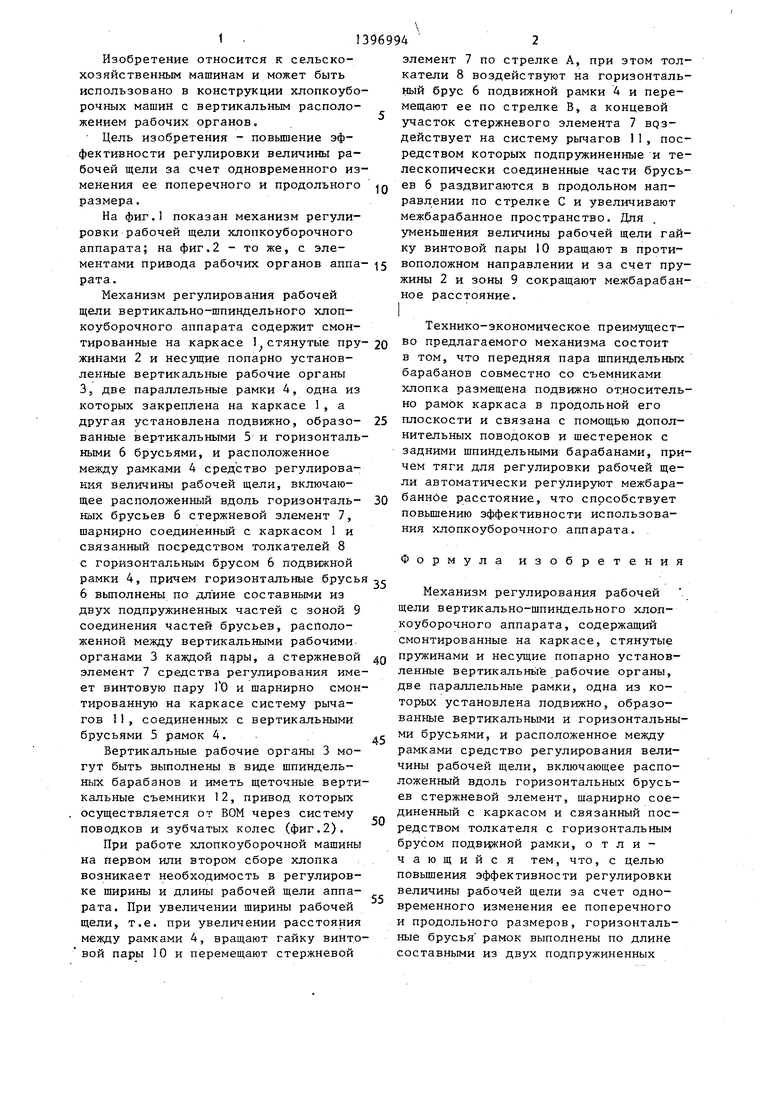
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм регулировки рабочей щели хлопкоуборочного аппарата | 1980 |
|
SU967363A1 |
| Хлопкоуборочный аппарат | 1983 |
|
SU1169560A1 |
| Способ уборки хлопка-сырца | 1987 |
|
SU1628918A1 |
| Хлопкоуборочный аппарат | 1980 |
|
SU942622A1 |
| Механизм регулировки рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата | 1980 |
|
SU917768A2 |
| Хлопкоуборочный аппарат | 1981 |
|
SU978771A1 |
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 1967 |
|
SU204778A1 |
| Хлопкоуборочный аппарат | 1972 |
|
SU471880A1 |
| Механизм подвески вертикально- шпиНдЕльНОгО ХлОпКОубОРОчНОгОАппАРАТА | 1979 |
|
SU826990A1 |
| Хлопкоуборочная машина | 1949 |
|
SU92896A2 |


-х
Изобретение относится к сельскохозяйственным машинам и может быть использовано в конструкции хлопкоуборочных машин с вертикальным расположением рабочих органов.
Цель изобретения - повышение эффективности регулировки величины рабочей щели за счет одновременного изменения ее поперечного и продольного размера.
На фиг.1 показан механизм регулировки рабочей щели хлопкоуборочного аппарата; на фиг.2 - то же, с элементами привода рабочих органов аппа- рата.
Механизм регулирования рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата содержит смон
тированные на каркасе 1 стянутые пру- 20 ° предлагаемого механизма состоит
жинами 2 и несущие попарно установленные вертикальные рабочие органы 3, две параллельные рамки 4, одна из которых закреплена на каркасе 1 , а другая установлена подвижно, образо- 25 ванные вертикальными 5 и горизонтальными 6 брусьями, и расположенное между рамками 4 средство регулирования величины рабочей щели, включающее расположенный вдоль горизонталь- 30 ных брусьев б стержневой элемент 7, шарнирно соединенньй с каркасом 1 и связанный посредством толкателей 8 с горизонтальным брусом 6 подвижной рамки 4, причем горизонтальные брусья ,с 6 выполнены по длине составными из двух подпружиненных частей с зоной 9 соединения частей брусьев, расположенной между вертикальными рабочими органами 3 каждой пцры, а стержневой 40 элемент 7 средства регулирования имеет винтовую пару 0 и шарнирно смонтированную на каркасе систему рычагов 11, соединенных с вертикальными брусьями 5 рамок 4.
Вертикальные рабочие органы 3 могут быть выполнены в виде шпиндельных барабанов и иметь щеточные вертикальные съемники 12, привод которых . осуществляется от ВОМ через систему поводков и зубчатых колес (фиг.2).
При работе хлопкоуборочной машины на первом или втором сборе хлопка возникает необходимость в регулировке ширины и длины рабочей щели аппарата. При увеличении ширины рабочей щели, т.е. при увеличении расстояния между рамками 4, вращают гайку винто- вой пары 10 и перемещают стержневой
45
50
55
в том, что передняя пара шпиндельны барабанов совместно со съемниками хлопка размещена подвижно относител но рамок каркаса в продольной его плоскости и связана с помощью допол нительных поводоков и шестеренок с задними шпиндельными барабанами, пр чем тяги для регулировки рабочей ще ли автоматически регулируют межбара банное расстояние, что способствует повьш1ению эффективности использования хлопкоуборочного аппарата.
Формула изобретени
Механизм регулирования рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата, содержащий смонтированные на каркасе, стянутые пружинами и несущие попарно установ ленньш вертикальнь1& рабочие органы, две параллельные рамки, одна из которых установлена подвижно, образованные вертикальными и горизонтальн ми брусьями, и расположенное между рамками средство регулирования вели чины рабочей щели, включающее распо ложенный вдоль горизонтальных брусь ев стержневой элемент, шарнирно сое диненный с каркасом и связанный пос редством толкателя с горизонтальным брусом подвижной рамки, о т л и - чающийс я тем, что, с целью повьшзения эффективности регулировки величины рабочей щели за счет одновременного изменения ее поперечного и продольного размеров, горизонтальные брусья рамок выполнены по длине составными из двух подпружиненных
5
0
элемент 7 по стрелке А, при этом толкатели 8 воздействуют на горизонтальный брус 6 подвижной рамки 4 и перемещают ее по стрелке В, а концевой участок стержневого элемента 7 врз- действует на систему рычагов 11, посредством которых подпружиненные и телескопически соединенные части брусьев 6 раздвигаются в продольном направлении по стрелке С и увеличивают межбарабанное пространство. Для уменьшения величины рабочей щели гайку винтовой пары 10 вращают в противоположном направлении и за счет пружины 2 и зоны 9 сокращают межбарабанное расстояние.
Технико-экономическое преимущест50 с 0
5
0
5
в том, что передняя пара шпиндельных барабанов совместно со съемниками хлопка размещена подвижно относительно рамок каркаса в продольной его плоскости и связана с помощью дополнительных поводоков и шестеренок с задними шпиндельными барабанами, причем тяги для регулировки рабочей щели автоматически регулируют межбара- банное расстояние, что способствует повьш1ению эффективности использования хлопкоуборочного аппарата.
Формула изобретения
Механизм регулирования рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата, содержащий смонтированные на каркасе, стянутые пружинами и несущие попарно установ- ленньш вертикальнь1& рабочие органы, две параллельные рамки, одна из которых установлена подвижно, образованные вертикальными и горизонтальными брусьями, и расположенное между рамками средство регулирования величины рабочей щели, включающее расположенный вдоль горизонтальных брусьев стержневой элемент, шарнирно соединенный с каркасом и связанный посредством толкателя с горизонтальным брусом подвижной рамки, о т л и - чающийс я тем, что, с целью повьшзения эффективности регулировки величины рабочей щели за счет одновременного изменения ее поперечного и продольного размеров, горизонтальные брусья рамок выполнены по длине составными из двух подпружиненных
31396994
частей, при этом зона соединения час- регулирования имеет винтовую пару и тей брусьев расположена между верти- шарнирно смонтированную на каркасе кальньми рабочими органами каждой па- систему рычагов, соединенных с вертиры, а стержневой элемент средства
1 5
кальными брусьями рамок.
