(5 МЕХАНИЗМ РЕГУЛИРОВКИ РАБОЧЕЙ ЩЕЛИ ХЛОПКОУБОРОЧНОГО АППАРАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Хлопкоуборочный аппарат | 1982 |
|
SU1101195A2 |
| Механизм регулировки рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата | 1980 |
|
SU917768A2 |
| Механизм регулирования рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата | 1986 |
|
SU1396994A1 |
| Шпиндельный барабан хлопкоуборочного аппарата | 1984 |
|
SU1145951A1 |
| Хлопкоуборочная машина | 1949 |
|
SU92896A2 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1140708A1 |
| Механизм регулировки рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата | 1985 |
|
SU1301345A2 |
| Способ уборки хлопка-сырца | 1987 |
|
SU1628918A1 |
| Вертикально-шпиндельный барабан с поджимным цилиндром хлопкоуборочного аппарата | 1989 |
|
SU1766317A1 |
| Хлопкоуборочный аппарат | 1972 |
|
SU471880A1 |
1
I Изобретение относится к сельскохозяйственному машиностроению, в частности к механизмам регулировки рабочей щели хлопкоуборочного аппарата.J
Известен механизм.регулировки рабочей щели хлопкоуборочного аппарата , содержащий смонтированные на каркасе две подвижные рамки со шпиндельными барабанами, установленные шар- ю нирно с возможностью поворота в противоположных направлениях в вертикальной плоскости, перпендикулярной направлению перемещения аппарата l .
Регулировка рабочей щели в извест- is ном механизме осуществляется Лутем поворота рамок относительно осей их шарниров в вертикальной плоскости, и величина щели в процессе работы машины остается постоянной. При необ 20 ходимости изменения величины рабочей щели требуется остановка машины и дополнительная регулировка рамок шпиндеэте ных аппаратов, что снижает производительность .машины за счет; простоев в процессе уборки хлопка.
Целью изобретения является увеличение диапазона регулировки щели при повышении .производительности машины за счет снижения простоев и увеличения полноты сбора хлопка.
Эта цель достигается тем, что в механизме регулировки рабочей щели хлопкоуборочного аппарата, содержащем смонтированные на каркасе две подвижные рамки со шпиндельными барабанами, установленные шарнирно с возможностью поворота в противоположных направлениях в вертикальной плоскости, перпендикулярной направлению; перемещения аппарата , средство поворота рамок содержит пару силовых цилиндров, оси которых расположены в вертикальной плоскости под углом одна к другой и симметрично к продольной оси аппарата, причем каждый силовой
цилиндр соединен посредством шарнирной тяги с противолежащей рамкой.
Средство поворота рамок дополнительно содержит закрепленную на каркасе аппарата винтовую пару, а силовые цилиндры ша.рнирно закреплены на ее гайке.
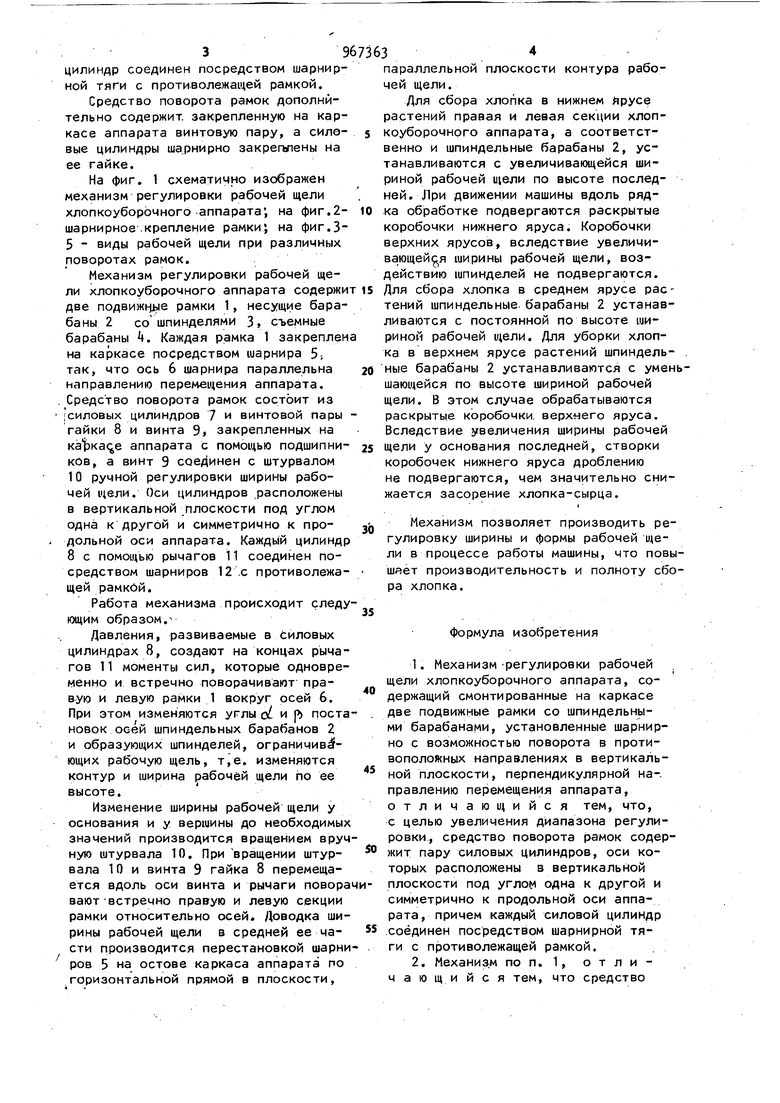
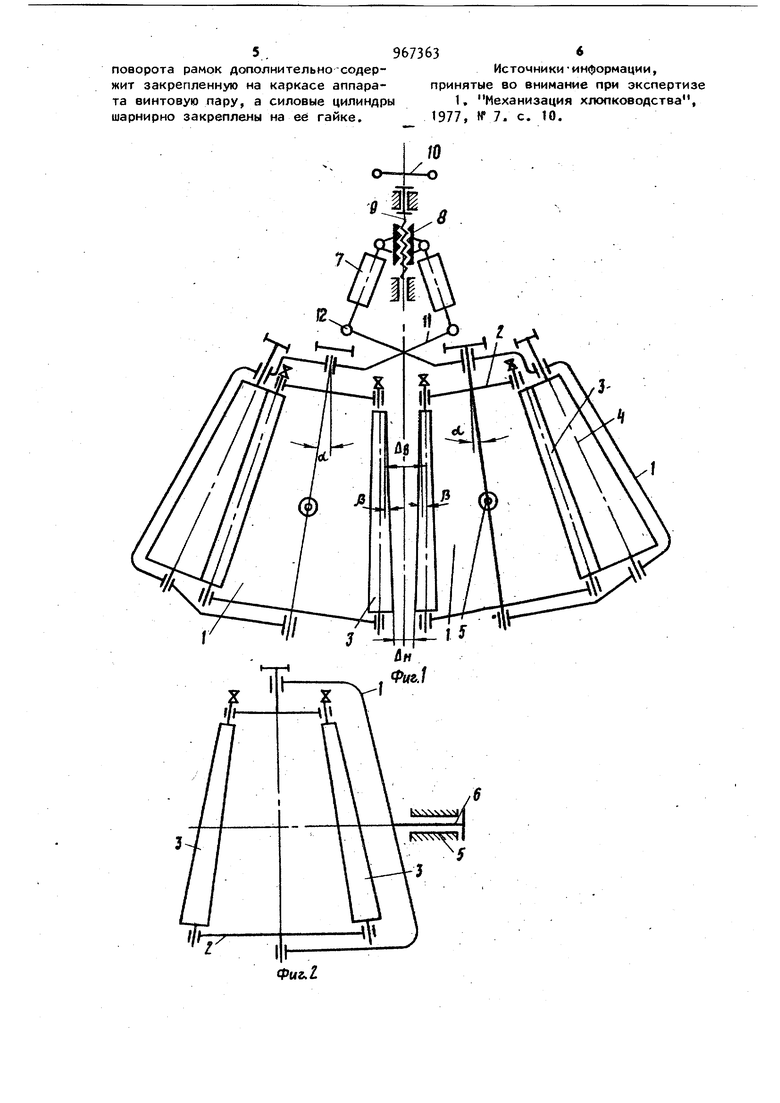
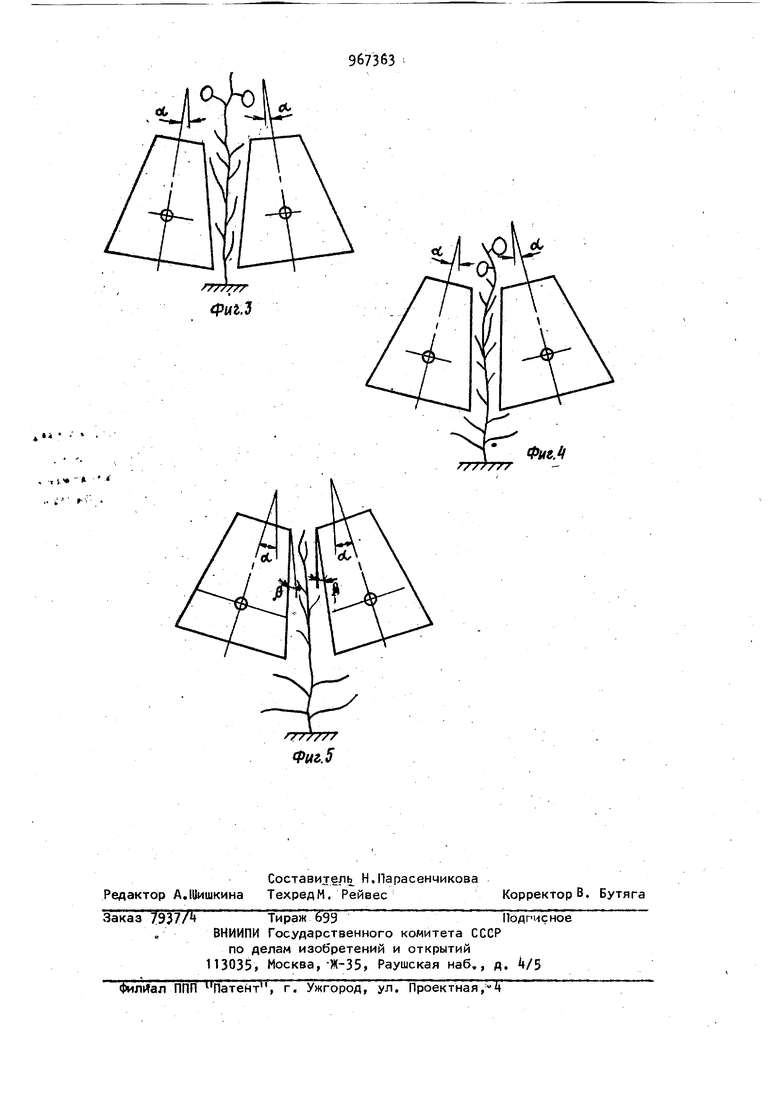
На фиг. 1 схематично изображен механизм регулировки рабочей щели хлопкоуборочного аппарата; на фиг.2- 10 ка шарнирное .крепление рамки; на фиг.З 5 - виды рабочей щели при различных поворотах рамок. Механизм регулировки рабочей щели хлопкоуборочного аппарата содержит is две подвижные рамки 1, несущие барабаны 2 со шпинделями 3, съемные барабаны . Каждая рамка 1 закреплен на каркасе посредством шарнира 5-, так, что ось 6 шарнира параллельна направлению перемещения аппарата. Средство поворота рамок состоит из 1СИЛОВЫХ цилиндров 7 и винтовой пары гайки 8 и винта 9 закрепленных на KatsKaqe аппарата с помощью подшипников, а винт 9 соединен с штурвалом 10 ручной регулировки ширины рабочей щели. Оси цилиндров расположены в вертикальной плоскости под углом одна к другой и симметрично к продольной оси аппарата. Каждый цилиндр 8 с помощью рычагов 11 соединен посредством шарниров 12 .с противолежащей рамкбй. Работа механизма происходит следу ющим образом. Давления, развиваемые в силовых цилиндрах 8, создают на концах рычагов 11 моменты сил, которые одновременно и встречно поворачивают правую и левую рамки 1 вокруг осей 6. При этом изменяются углы с/ и Ъ поста новок осей шпиндельных барабанов 2 и образующих шпинделей, ограничивс ющих рабочую щель, т,е. изменяются контур и ширина рабочей щели по ее высоте. Изменение ширины рабочей щели у основания и у вершины до необходимых значений производится вращением вруч ную штурвала ТО. При вращении штурвала 10 и винта 9 гайка В перемещается вдоль оси винта и рычаги повора вают -встречно правую и левую секции рамки относительно осей. Доводка ширины рабочей щели в средней ее части производится перестановкой шарни ров 5 на остове каркаса аппарата по горизонтальной прямой в плоскости.
параллельной плоскости контура рабочей щели.
Для сбора хлопка в нижнем йрусе растений правая и левая секции хлопкоуборочного аппарата, а соответственно и шпиндельные барабаны 2, устанавливаются с увеличивающейся шириной рабочей щели по высоте последней. Лри движении машины вдоль рядобработке подвергаются раскрытые коробочки нижнего яруса. Коробочки верхних ярусов, вследствие увеличивающей я ширины рабочей щели, воздействию шпинделей не подвергаются. Для сбора хлопка в среднем ярусе растений шпиндельные барабаны 2 устанавливаются с постоянной по высоте шириной рабочей щели. Для уборки хлопка в верхнем ярусе растений шпиндель- . ныв барабаны 2 устанавливаются с уменьшающейся по высоте шириной рабочей щели. В этом случае обрабатываются раскрытые коробочки, верхнего яруса. Вследствие увеличения ширины рабочей щели у основания последней, створки коробочек нижнего яруса дроблению не подвергаются, чем значительно снижается засорение хлопка-сырца. Механизм позволяет производить регулировку ширины и формы рабочей щели в процессе работы машины, что повышает производительность и полноту сбора хлопка. Формула изобретения 1.Механизм -регулировки рабочей щели хлопкоуборочного аппарата, содержащий смонтированные на каркасе две подвижные рамки со шпиндельными барабанами, установленные шарнирно с возможностью поворота в противоположных направлениях в вертикальной плоскости, перпендикулярной на-правлению перемещения аппарата, отличающийся тем, что, с целью увеличения диапазона регулировки, средство поворота рамок содержит пару силовых цилиндров, оси которых расположены в вертикальной плоскости под углом одна к другой и симметрично к продольной оси аппарата, причем каждый силовой цилиндр .соединен посредством шарнирной тяги с противолежащей рамкой. 2.Механизм по п. 1, отличающийся тем, что средство
поворота рамок дополнительно содер-Источники-информации,
жит закрепленную на каркасе аппара- принятые во внимание при экспертизе та винтовую пару, а силовые цилиндры 1. Механизация хлопководства, шарнирно закреплены на ее гайке. 1977, N 7/ с. 10.
Фиг.
ее.
. -Tl.
,.; .
///////
