1
Изобретение относится к области сельскохозяйственного машиностроения и может быть использовано в хлопкоуборочных машинах для сбора хлопкового волокна из коробочек хлопчатника.
Известен механизм подвески вертикально-шпиндельного хлопкоуборочного аппарата, содержаш,ий смонтированные в каркасе две рамки Шпиндельных барабанов, одна из которых установлена .подвижно и связана с осью их крепления посредством кронштейна и шарнирного поводка с регулируемым упором и имеет опорную Пяту 1.
Недостатком известного механизма подвески является сложность конструкции каркаса аппарата, не надежность в работе и неудобство регулировки рабочей ш,ели аппарата.
Целью изобретения является повышение надежности работы аппарата, повышение удобства в его обслуживании и исключение перекоса осей барабанов при регулировке рабочей шеди аппарата.
Указанная цель достигается тем, что подвижная рамка снабжена упругим элементом, а поводок выполнен в виде углового рычага, одно плечо которого соединено с подвижной рамкой, а другое плечо взаимодействует с регулируемым упором, при этом
опорная пята соединена с кронштейном шарнирно посредством упругого элемента. Упругий элемент выполнен в виде пружины.
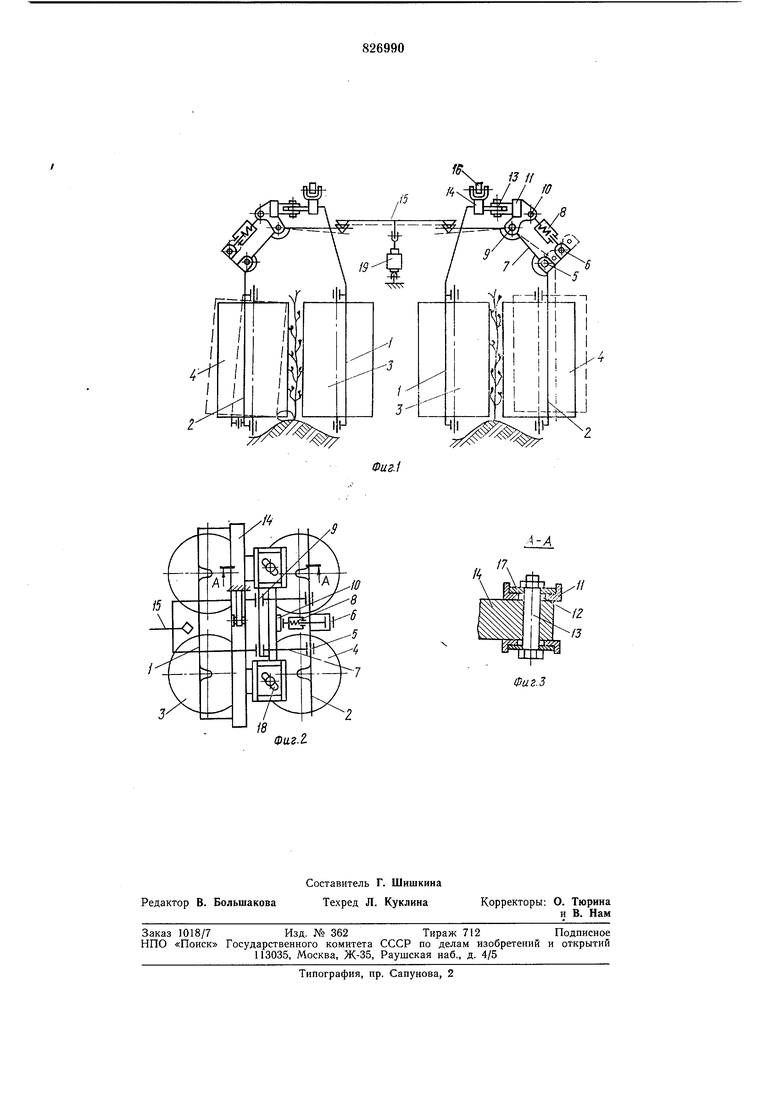
На фиг. 1 изображен предлагаемый механизм подвески, вид спереди; на фиг. 2- вид в плане; на фиг. 3 - сечение А-А фиг. 2. Механизм подвески содерл ит неподвижную 1 и подвижную 2 рамки, на которых монтируются шпиндельные барабаны 3 и 4. Подвижная рамка 2 посредством шарнира 5 и опорной пяты 6 соединена с поводком, выполненным в виде углового рычага 7 и упругим элементом 8, которые посредством шарниров 9 и 10 соединены с продольным брусом 11, имеюш,им овальное отверстие 12. Угловой рычаг 7 и упругий элемент - пружина 8 с шарнирами 5, 9, 10 и пятой 6
образует четырехзвенник. Продольный брус 11 с овальным отверстием 12 и регулировочной шайбой 17 с пазом 18 с помош,ью осей 13, имеюшихся над передней и задней парами шпиндельных барабанов, присоединем к брусу 14 неподвижной рамы 1.
На конце углового рычага 7 установлен регулируемый упор 15, выполненный в виде коромысла, соединенного с механизмам управления гидроцилиндром 19.
Установка разного размера ра.бочей щели между передней и задней парами шпиндельных барабанов (перепада), регулирование усилия обжатия кустов при обработке уборочным аппаратом, а также нужной ширины рабочей щели в рабочей камере осуществляется следующим образом.
Регулировка перепада щели производится смещением щайбы 17 вперед или назад по пазу бруса 11. При этом брус 11, имеющий овальное отверстие 12 смещается к брусу 14 или отходит от него по оси 13. Таким обpaaoiM, смещая брус 11 над передней парой шпиндельных барабанов от бруса 14 получим желаемую разницу щели между смежными барабанами передней и задней пары, т. е. перепад рабочей щели. Усилие обжатия кустов регулируется изменением жесткости пружины 8. Пружияа служит также предохранительным устройством, в случае П0пада:ния между щпи1ндельными барабанами жесткого предмета (фиг. 1 слева).
Увеличение рабочей щели в рабочей камере (с заданным перепадом между барабанами) осуществляется перемещением вниз регудировочеого упора 15. Он нажимает на плечо рычага 7, который через шарниры 9 и 5 воздействует на подвижные рамки 2, перемещает рамки параллельно неподвижным рамкам 1 (без перекосов), так как упругий элемент 8, действуя на опорную пяту 6, разворачивает подвижную рамку 2 в вертикальной плоскости. Ввиду того, что шарнир 9 подвески поворотных устройств смещен относительно центра тяжести щпиндельных барабанов, плечо углового рычага 7 прижимается к регулировочному упору 15, предохраняя подвижную рамку 2 от колебаний.
Данный механизм подвески вертикальнощ пиндельного аппарата повышает надежность его работы, за счет обеспечения постоянства заданных зазоров меладу парами шпиндельных барабанов при регулировании размеров рабочей щели с заданным усилием обжатия кустов.
Формула изобретения
1.Механизм подвески вертикально-шпиндельного хлопкоуборочного аппарата, содержащий смонтированные в каркасе две
рамки шпиндельных барабанов, одна из которых установлена подвижно и связана с осью их крепления посредством кронштейна и шарнирного поводка с регулируемым упором и имеет опорную пяту, отличающийся тем, что, с целью повышения надежности работы аппарата за счет исключения перекосов осей барабанов при регулировке рабочей щели, подвижная рамка снабжена упругим элементом, а поводок
выполнен в виде углового рычага, одно плечо которого соединено с подвижной рамкой, а другое плечо взаимодействует с регулируемым упором, при этом опорная пята соединена с кронщтейном шарнирно посредством упругого элемента.
2.Механизм по п. 1, отличающийся тем, что упругий элемент выполнен в виде пружины.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 635917, кл. А 01D 45/18, 1977.
/J //
Ю
vtrf
Hh
1
)
L
%
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм регулирования рабочей щели вертикально-шпиндельного хлопкоуборочного аппарата | 1986 |
|
SU1396994A1 |
| ХЛОПКОУБОРОЧНЫЙ АППАРАТ | 1965 |
|
SU175773A1 |
| Хлопкоуборочный аппарат | 1983 |
|
SU1169560A1 |
| Хлопкоуборочный аппарат | 1973 |
|
SU483951A1 |
| Хлопкоуборочный аппарат | 1972 |
|
SU471880A1 |
| Механизм подвески аппаратов многорядной уборочной машины | 1975 |
|
SU572240A1 |
| Устройство для блоков навески аппаратов уборочной машины | 1989 |
|
SU1657096A1 |
| Механизм регулировки рабочей щели хлопкоуборочного аппарата | 1980 |
|
SU967363A1 |
| Привод шпинделей вертикально-шпиндельного барабана хлопкоуборочного аппарата | 1980 |
|
SU995712A1 |
| Хлопкоуборочный аппарат | 1980 |
|
SU880325A1 |
15
7/.Фи.г.2.
ьд
Фиг.З
