/5
(Л
со
Х)
ОО
г
О5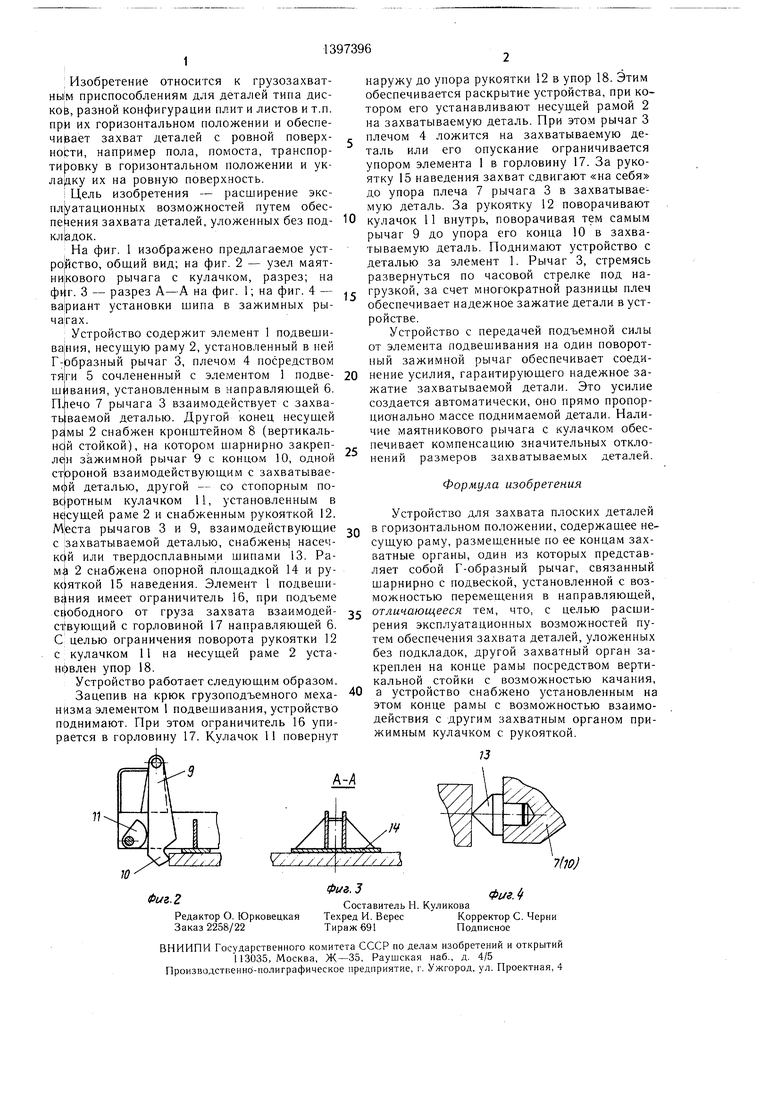
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата плоских деталей | 1988 |
|
SU1744039A1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ | 1989 |
|
RU2006442C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 1990 |
|
RU2009978C1 |
| Грузозахватное устройство | 1990 |
|
SU1776624A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО ДЛЯ МЯГКИХ ГРУЗОВ | 1988 |
|
SU1563151A1 |
| Захват-кантователь | 1984 |
|
SU1299939A1 |
| Захватное устройство для пакетов плит | 1986 |
|
SU1463688A1 |
| ЗАХВАТ | 1990 |
|
RU2009984C1 |
| ГРУЗОВОЙ ЗАХВАТ | 1991 |
|
RU2009980C1 |
Изобретение относится к подъемно- транспортному оборудованию, в частности к устройствам для захвата плоских деталей в горизонтальном положении. Цель изобретения - расширение эксплуатационных возможностей путем обеспечения захвата деталей, уложенных без подкладок. Устройство для захвата плоских деталей в горизонтальном положении содержит несущую раму 2, по концам которой размещены захватные органы. Первый захватный орган представляет собой Г-образный рычаг 3. Рычаг 3 связан шарнирно с подвеской 1. Второй захватный орган закреплен на конце несушей рамы 2 посредством вертикальной стойки 8 с возможностью качания. На этом конце рамы размешен прижимной кулачок с рукояткой для взаимодействия с вторым захватным органом. 4 ил.
Фиг
Изобретение относится к грузозахват- ны1м приспособлениям для деталей типа дис- коЬ, разной конфигурации плит и листов и т.п. при их горизонтальном положении и обеспечивает захват деталей с ровной поверхности, например пола, помоста, транспортировку в горизонтальном положении и ук- ла|дку их на ровную поверхность.
i Цель изобретения - расширение экс- плk aтaциoнныx возможностей путем обеснаружу до упора рукоятки 12 в упор 18. Этим обеспечивается раскрытие устройства, при котором его устанавливают несущей рамой 2 на захватываемую деталь. При этом рычаг 3 плечом 4 ложится на захватываемую деталь или его опускание ограничивается упором элемента 1 в горловину 17. За рукоятку 15 наведения захват сдвигают «на себя до упора плеча 7 рычага 3 в захватываемую деталь. За рукоятку 12 поворачивают
пе 4ения захвата деталей, уложенных без под- Ю кулачок 11 внутрь, поворачивая тем самым клЬдок.рычаг 9 до упора его конца 10 в захваНа фиг. 1 изображено предлагаемое уст- тываемую деталь. Поднимают устройство с родство, общий вид; на фиг. 2 - узел маят- деталью за элемент 1. Рычаг 3, стремясь ни|кового рычага с кулачком, разрез; на ф1|г. 3 - разрез А-А на фиг. 1; на фиг. 4 - вариант установки шипа в зажимных рычагах.
Устройство содержит элемент 1 подвещи- ва|ния, несущую раму 2, установленный в ней Г бразный рычаг 3, плечом 4 посредством тя1ги 5 сочлененный с элементом 1 подве- 20 шивания, установленным в направляющей 6. n|ie4O 7 рычага 3 взаимодействует с захва- ть|ваемой деталью. Другой конец несущей рг(мы 2 снабжен кронштейном 8 (вертикаль- нс|й стойкой), на котором шарнирно закрепразвернуться по часовой стрелке под на- 4с грузкой, за счет многократной разницы плеч обеспечивает надежное зажатие детали в устройстве.
Устройство с передачей подъемной силы от элемента подвешивания на один поворотный зажимной рычаг обеспечивает соединение усилия, гарантирующего надежное зажатие захватываемой детали. Это усилие создается автоматически, оно прямо пропор- цио нально массе поднимаемой детали. Наличие маятникового рычага с кулачком обеспечивает компенсацию значительных отклонений размеров захватываемых деталей.
25
Формула изобретения Устройство для захвата плоских деталей
зажимной рычаг 9 с концом 10, одной
стрроной взаимодействующим с захватываемфй деталью, другой - со стопорным поBcjpOTHbiM кулачком 11, установленным в
нфущей раме 2 и снабженным рукояткой 12.
рычагов 3 и 9, взаимодействующие Q в горизонтальном положении, содержащее нес захватываемой деталью, снабжень насечкс|й или твердосплавными шипами 13. Рам 2 снабжена опорной площадкой 14 и рук4яткой 15 наведения. Элемент 1 подвешив ния имеет ограничитель 16, при подъеме
сущую раму, размеш,енные по ее концам захватные органы, один из которых представляет собой Г-образный рычаг, связанный шарнирно с подвеской, установленной с возможностью перемещения в направляющей.
СЕ|ободного от груза захвата взаимодей- 35 отличающееся тем, что, с целью расши- с вующий с горловиной 17 направляющей 6.рения эксплуатационных возможностей пуС целью ограничения поворота рукоятки 12 с кулачком 11 на несущей раме 2 установлен упор 18.
Устройство работает следующим образом.
тем обеспечения захвата деталей, уложенных без подкладок, другой захватный орган закреплен на конце рамы посредством вертикальной стойки с возможностью качания.
Зацепив на крюк грузоподъемного меха- 40 а устройство снабжено установленным на
низма элементом 1 подвешивания, устройство поднимают. При этом ограничитель 16 упирается в горловину 17. Кулачок 11 повернут
этом конце рамы с возможностью взаимодействия с другим захватным органом прижимным кулачком с рукояткой.
А-Л
наружу до упора рукоятки 12 в упор 18. Этим обеспечивается раскрытие устройства, при котором его устанавливают несущей рамой 2 на захватываемую деталь. При этом рычаг 3 плечом 4 ложится на захватываемую деталь или его опускание ограничивается упором элемента 1 в горловину 17. За рукоятку 15 наведения захват сдвигают «на себя до упора плеча 7 рычага 3 в захватываемую деталь. За рукоятку 12 поворачивают
кулачок 11 внутрь, поворачивая тем самым рычаг 9 до упора его конца 10 в захватываемую деталь. Поднимают устройство с деталью за элемент 1. Рычаг 3, стремясь
развернуться по часовой стрелке под на- грузкой, за счет многократной разницы плеч обеспечивает надежное зажатие детали в устройстве.
Устройство с передачей подъемной силы от элемента подвешивания на один поворотный зажимной рычаг обеспечивает соединение усилия, гарантирующего надежное зажатие захватываемой детали. Это усилие создается автоматически, оно прямо пропор- цио нально массе поднимаемой детали. Наличие маятникового рычага с кулачком обеспечивает компенсацию значительных отклонений размеров захватываемых деталей.
Формула изобретения Устройство для захвата плоских деталей
ризонтальном положении, содержащее несущую раму, размеш,енные по ее концам захватные органы, один из которых представляет собой Г-образный рычаг, связанный шарнирно с подвеской, установленной с возможностью перемещения в направляющей.
отличающееся тем, что, с целью расши- рения эксплуатационных возможностей путем обеспечения захвата деталей, уложенных без подкладок, другой захватный орган закреплен на конце рамы посредством вертикальной стойки с возможностью качания.
а устройство снабжено установленным на
а устройство снабжено установленным на
этом конце рамы с возможностью взаимодействия с другим захватным органом прижимным кулачком с рукояткой.
| Меламед С | |||
| М | |||
| Автоматические захваты для штучных грузов | |||
| - М., 1965, с | |||
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
