W
со со
о: ел
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ТРАНСПОРТИРОВАНИЯ ТКАНИ ШВЕЙНОЙ МАШИНЫ (2 ВАРИАНТА) | 2004 |
|
RU2281352C1 |
| Шарнирно-рычажный механизм редуктора угловой скорости | 1986 |
|
SU1511496A1 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1493838A1 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| ПРЯМОЛИНЕЙНО-НАПРАВЛЯЮЩИЙ МЕХАНИЗМ | 1991 |
|
RU2006725C1 |
| РЫЧАЖНЫЙ ПРЯМОЛИНЕЙНО НАПРАВЛЯЮЩИЙ МЕХАНИЗМ НОГИ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2402450C2 |
| Рычажно-зубчатый механизм с остановками | 1987 |
|
SU1421923A1 |
| Установка для резки плодов на дольки и вырезки сердцевины | 1989 |
|
SU1722403A1 |
| Прямолинейно направляющий механизм Мамырина | 1988 |
|
SU1520280A1 |
| Шарнирно-рычажный механизм Мамырина для прямолинейных двухкоординатных перемещений | 1988 |
|
SU1504432A1 |
Изобретение относится к шарнир но-рычажным прямолинейно направляющим механизмам. Цель изобретения - обеспечение перемещения рабочего органа по заданному закону. При вращении кривошипа 2 шарнир А шатуна 7 перемещается по прямой ОА, лежащей в плоскости шарнирно-рычажНого параллелограмма 3-4-5-6. При этом шарнир В звена 4, связьгоающий его с рабочим органом, перемещается по прямой ОБ, являющейся продолжением прямой ОА, Соотношение длин отрезков ОА и ОВ равно соотношению длин звеньев 6 и 5 параллелограмма. 2 ил.
/тч
«(/г/
Изобретение относится к машино- строеимо, а именно к шарнирно-рычаж- ным направляющим механизмам, и может найти применение, в частности, в станкостроении.
Цель изобретения - обеспечение перемещения рабочего органа по заданному закону, а именно по прямолинейной траектории.
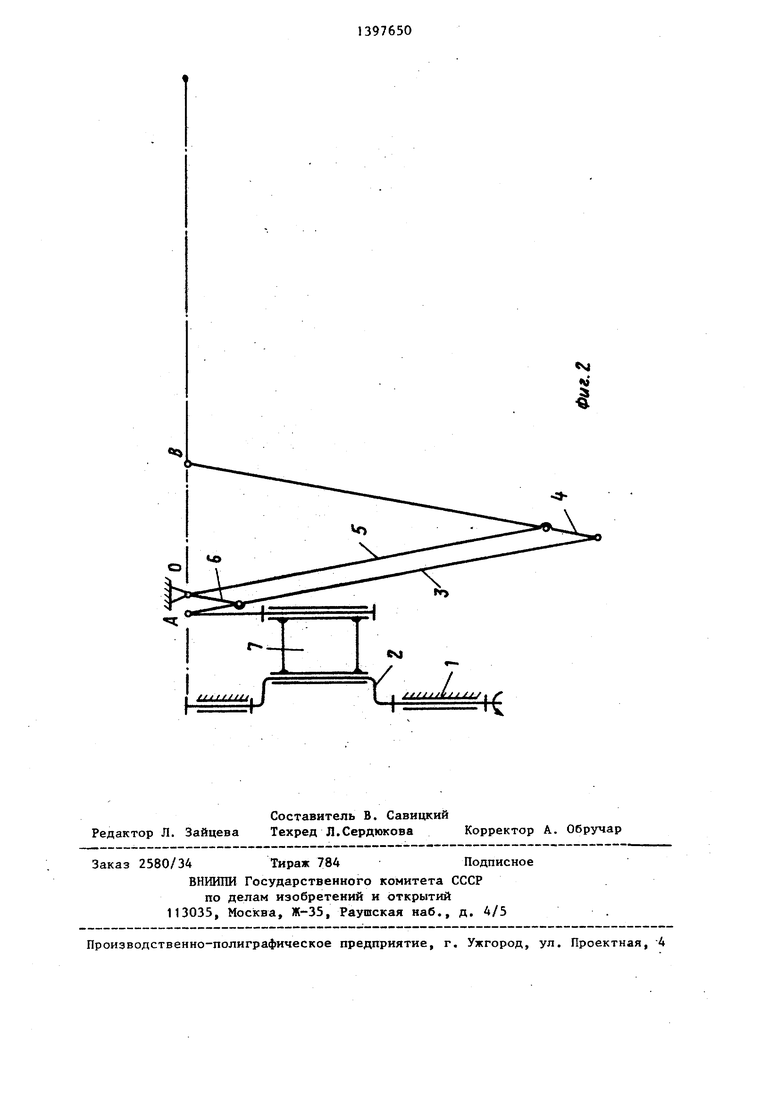
На фиг. I и 2 показана кинематическая схема механизма соответственно в крайнем правом и крайнем левом положениях.
Механизм содержит основание 1, у :тановленный на нем кривошип 2 и шарнирно-рычажный параллелограмм, составленный из звеньев 3-6. Звенья 3 и 4 представляют собой одинаковые двуплечие рычаги, длины плеч которьк соответственно равны длинам звеньев 5 и 6. Короткое плечо рычага 4 и длинное плечо рычага 3 вместе со звеньями 5 и 6 образуют параллелограмм. Короткое плечо рычага 3 через шарнир А связано с одним концом шатуна 7, второй конец которого шарнирно связан с кривошипом 2. Шарнирно-рычажный параллелограмм связан с основанием 1 через шарнир О, противоположный шар- виру, связывающему двуплечие рычаги 3 и 4.
Механизм работает следующим обра- |зом.
При вращении кривошипа 2 шарнир А ;шатуна 7 перемещается по прямой ОА,
лежащей в плоскости шарнирно-рычаж- ного параллелограмма 3-4-5-6. Параллелограмм трансформируется из крайнего правого положения (фиг. 1) в крайнее левое положение (фиг. 2), что соответствует повороту кривошипа 2 на 180°. При этом шарнир В рычага 4, связанный с рабочим органом (не показан) перемещается по прямой ОВ, являющейся продолжением прямой ОА. Соотношение длин отрезков ОА и ОВ равно соотношению длин звеньев 6 и 5 параллелограмма .
Формула изобретения
Шарнирно-рычажный прямолинейно направляющий механизм, содержащий основание, установленньй на основании кривошип и связанный с ним шарнирно-ры- чажный параллелограмм, одна короткая и одна длинная стороны которого образованы коротким и длинным плечами соответствующих одинаковых двуплечих рычагов, о тлич агощийс я тем что, с целью получения заданного за кона движения, связь кривошипа с параллелограммом выполнена в виде шатуна, шарнирно .связанного одним концом с кривошипом, а другим - со свободным коротким плечом двуплечего рычага, при этом параллелограмм связан с основанием с помощью шарнира, противоположного шарниру, связывающему двуплечие рычаги.
si м
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1979, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Телефонная трансляция с катодными лампами | 1922 |
|
SU333A1 |
| ДВЕРНОЕ СИГНАЛЬНОЕ ПРИСПОСОБЛЕНИЕ | 1923 |
|
SU650A1 |
