(Л
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ПЛАВАЮЩЕГО ШАРНИРНОГО ПАРАЛЛЕЛОГРАММА | 2021 |
|
RU2765387C1 |
| Шарнирно-рычажный прямолинейно направляющий механизм | 1987 |
|
SU1397650A1 |
| УСТРОЙСТВО ДЛЯ ПРОЕКТИРОВАНИЯ и ИССЛЕДОВАНИЯ ПРОСТРАНСТВЕННЫХ РЫЧАЖНЫХ МЕХАНИЗМОВ | 1969 |
|
SU249878A1 |
| ШАРНИРНЫЙ КРИВОШИПНЫЙ МЕХАНИЗМ | 2020 |
|
RU2740526C1 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |
| Шарнирно-рычажный механизм прерывистой подачи | 1986 |
|
SU1364797A1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| Прибор по проекционной графике | 1990 |
|
SU1744702A1 |
| ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ШУМАТОВА (ВАРИАНТЫ) | 2014 |
|
RU2577966C1 |
Изобретение относится к машиностроению, а именно шарнирно-рычажным преобразователям скорости вращения ведомого звена, и может найти применение, в частности в вариаторах угловой скорости. Цель изобретения - расширение кинематических возможностей за счет расширения диапазона регулировки скорости вращения ведомого звена. При вращении ведущего вала 2 его кривошип 4 воздействует на шатуны 6-8, и шарнирно-рычажный параллелограмм АВСД вращается, деформируясь на ходу. Телескопический ведомый кривошип 5 передает вращение на ведомый вал 3. Разность скоростей валов 2 и 3 определяется соотношением длин плеч АО и ОД ведущего кривошипа 4. 11 ил.
фиг. 2
3151
Изобретение относится к машиностроению, а именно к шарнирно-рычаж- ным преобразователям скорости вращения ведомого звена, и может найти применение, в частности, в вариаторах угловой скорости.
Цель изобретения - расширение кинематических возможностей механизма за счет расширения диапазона регулировки скорости вращения ведомого зве на.
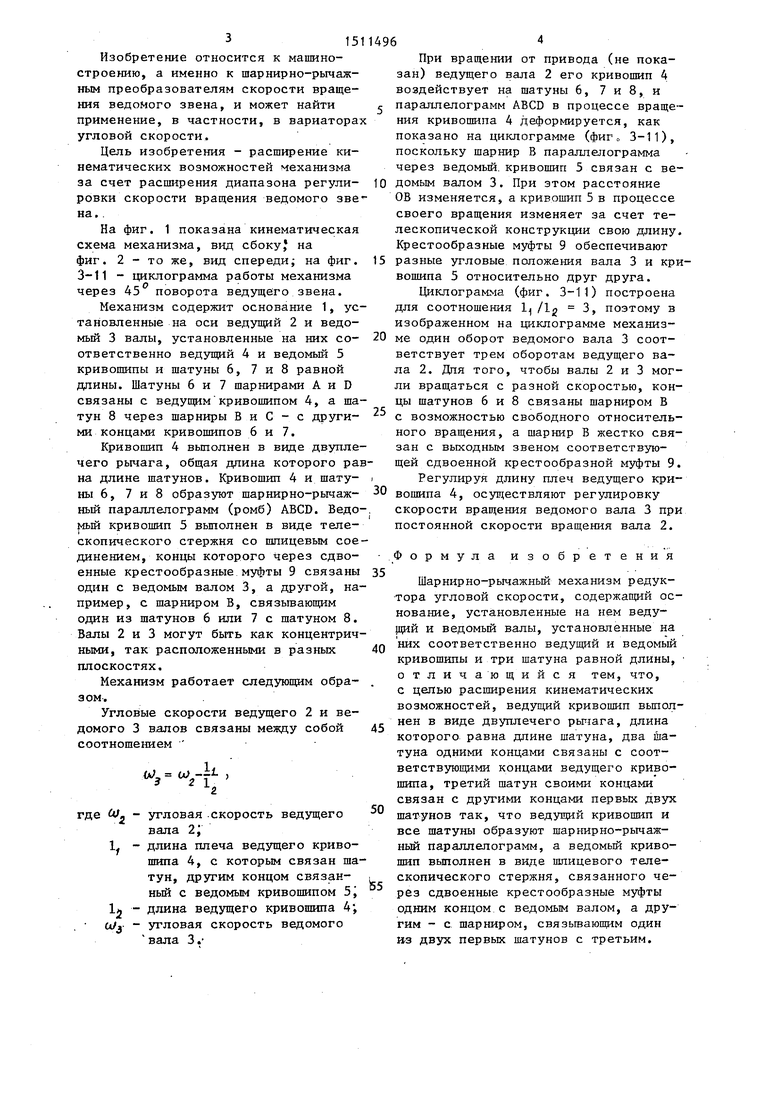
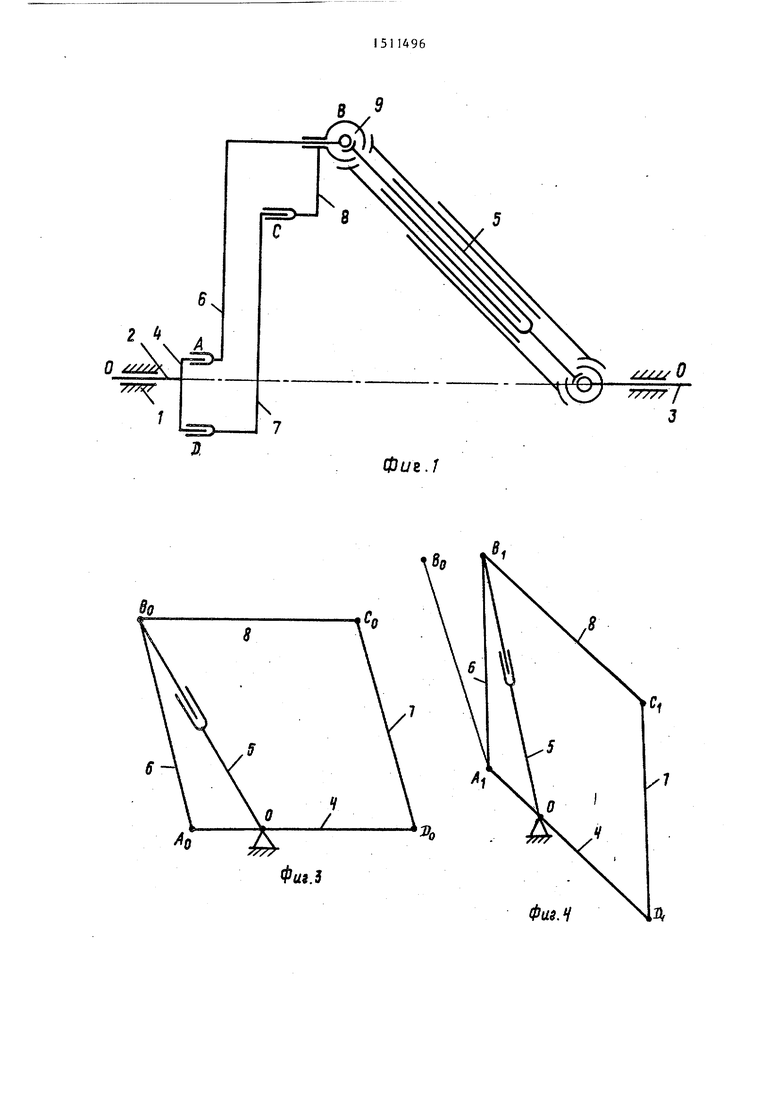
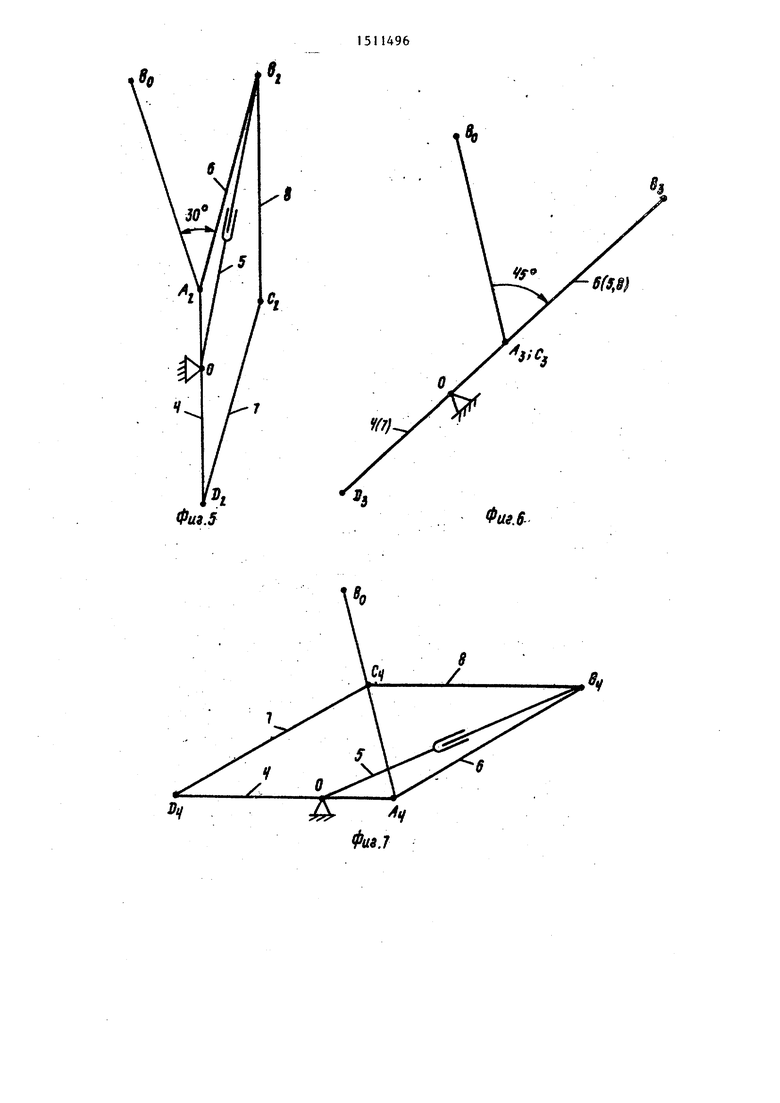
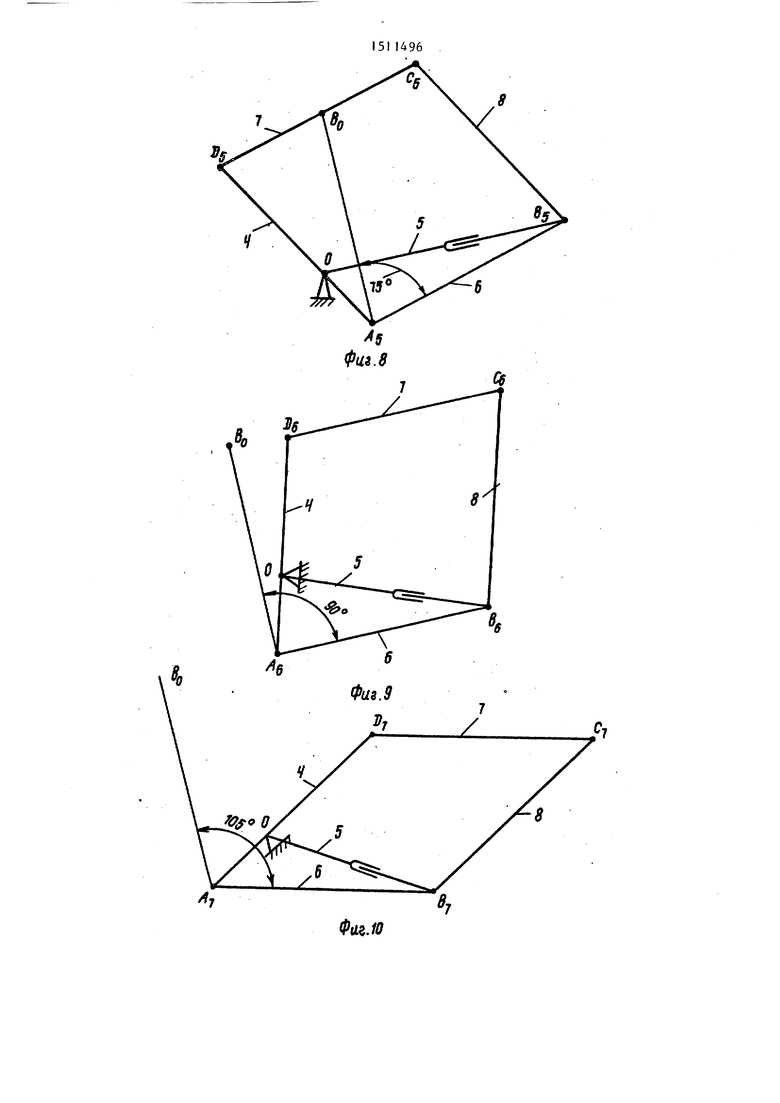
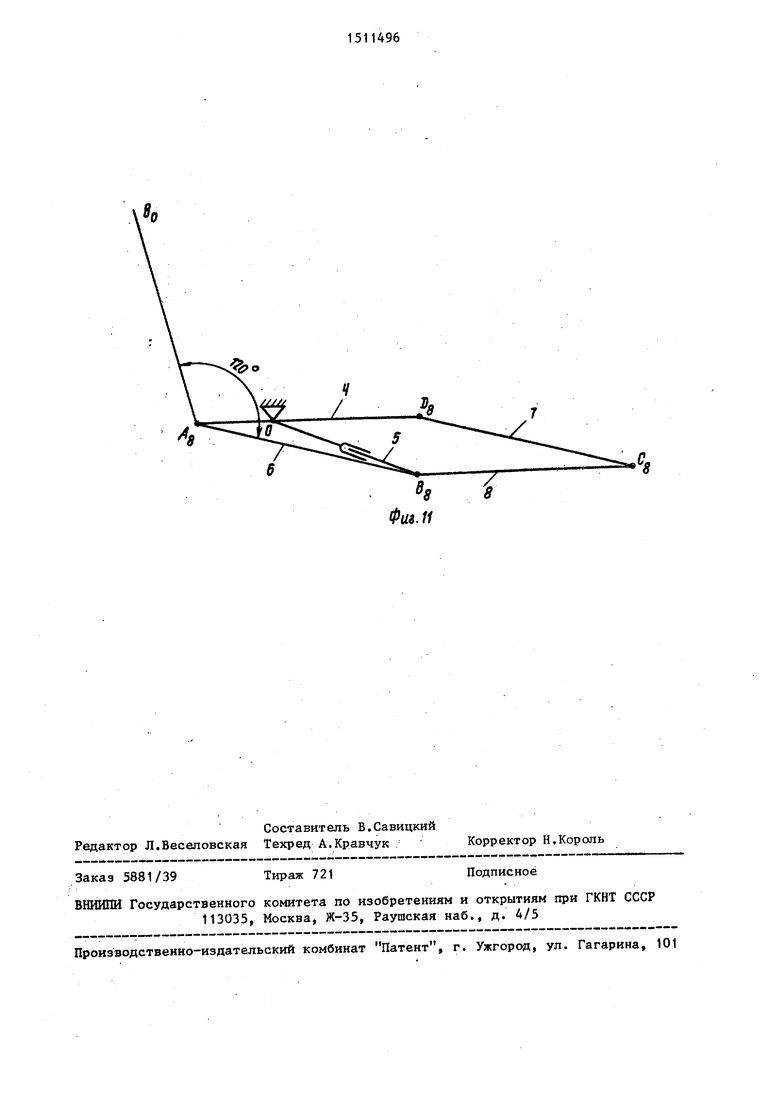
На фиг. 1 показана кинематическая схема механизма, вид сбоку на фиг. 2 - то же, вид спереди; на фиг. 3-11 - циклограмма работы механизма через 45 поворота ведущего звена.
Механизм содержит основание 1, установленные на оси ведущий 2 и ведомый 3 валы, установленные на них соответственно ведупщй 4 и ведомый 5 кривошипы и шатуны 6, 7 и 8 равной длины. Шатуны 6 и 7 шарнирами А и D связаны с ведущим кривошипом 4, а шатун 8 через шарниры В и С - с другими концами кривошипов 6 и 7.
Кривошип 4 вьшолнен в виде двуплечего рычага, общая дпина которого равна длине шатунов. Кривошип 4 и шатуны 6, 7 и 8 образуют шарнирно-рычаж- ный параллелограмм (ромб) ABCD. Ведо- мьй кривошип 5 выполнен в виде телескопического стержня со шпицевым соединением, концы которого через сдвоенные крестообразные муфты 9 связаны один с ведомым валом 3, а другой, например, с шарниром В, связьгоающим один из шатунов 6 или 7 с шатуном 8. Валы 2 и 3 могут быть как концентричными, так расположенными в разных плоскостях.
Механизм работает следующим образом.
Угловые скорости ведущего 2 и ведомого 3 ВШ1ОВ связаны между собой соотношением
(;, ,
где W, - угловая .скорость ведущего
вала 2,
При вращении от привода (не показан) ведущего вала 2 его кривошип 4 воздействует на шатуны 6, 7 и 8, и
параллелограмм ABCD в процессе вращения кривошипа 4 деформируется, как показано на циклограмме (фиг о 3-11), поскольку шарнир В параллелограмма через ведомый, кривошип 5 связан с ведомым валом 3. При зтом расстояние ОБ изменяется, а кривошип 5 в процессе своего вращения изменяет за счет телескопической конструкции свою длину. Крестообразные муфты 9 обеспечивают
разные угловые положения вала 3 и кривошипа 5 относительно друг друга.
Циклограмма (фиг. 3-11) построена для соотношения 1 /Ig 3, поэтому в изображенном на циклограмме механизме один оборот ведомого вала 3 соответствует трем оборотам ведущего вала 2. Для того, чтобы валы 2 и 3 могли вращаться с разной скоростью, концы шатунов 6 и 8 связаны шарниром В
с возможностью свободного относительного вращения, а шарнир В жестко связан с выходным звеном соответствующей сдвоенной крестообразной муфты 9.
Регулируя длину плеч ведущего кривошипа 4, осуществляют регулировку скорости вращения ведомого вала 3 при постоянной скорости вращения вала 2.
Формула изобретения
Шарнирно-рычажный механизм редуктора угловой скорости, содержащий основание, установленные на нем ведущий и ведомый валы, установленные на
них соответственно ведущий и ведомый кривошипы и три шатуна равной длины, отличающийся тем, что, с целью расширения кинематических возможностей, ведущий кривошип выполнен в виде двуплечего рьиага, длина которого равна длине шатуна, два шатуна одними концами связаны с соответствующими концами ведущего кривошипа, третий шатун своими концами связан с другими концами первых двух шатунов так, что ведущий кривошип и все шатуны образуют шарнирно-рычаж- ный параллелограмм, а ведомый кривошип выполнен в виде шпицевого телескопического стержня, связанного через сдвоенные крестообразные муфты одним концом с ведомым валом, а другим - с шарниром, связьгоающим один з двух первых шатунов с третьим.
АО
Фиг.З
Фиг. 1
Фаз, Ч
14
Фиа.
Фиг.б
8
8
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| М.: Наука, 1979, т | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Распределительный механизм для паровых машин | 1921 |
|
SU308A1 |
| МЕТАЛЛИЧЕСКАЯ ШАРНИРНАЯ СЕТКА | 1922 |
|
SU603A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
